舵机加载台控制系统和舵负载模拟系统及半实物仿真系统的制作方法
- 国知局
- 2024-10-09 16:07:02
本发明涉及自动化控制,尤其涉及一种舵机加载台控制系统和舵负载模拟系统及半实物仿真系统。
背景技术:
1、大力矩舵加载器设备(简称舵机加载台)是高速飞行器地面半实物仿真系统的重要组成部分,用于飞行器制导回路和稳定回路进行半实物仿真试验,在半实物仿真过程中,舵机加载台给参试舵机施加力矩,用以模拟飞行器飞行过程中作用在舵面上的气动载荷,使得在实验室条件下复现飞行器在空中飞行时舵面所受的各种载荷,从而检测其舵机驱动系统的技术性能指标,将传统的自破坏性全实物实验转化为实验室条件下的预测性研究,以达到缩短研制周期,提高可靠性和成功率的目的。
2、现有技术中对舵机加载台系统尤其是舵机加载台的控制系统的研究较少,本领域迫切需要一种高性能的舵机加载台控制系统和舵负载模拟系统以及半实物仿真系统。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一,提出了一种舵机加载台控制系统和舵负载模拟系统及半实物仿真系统。
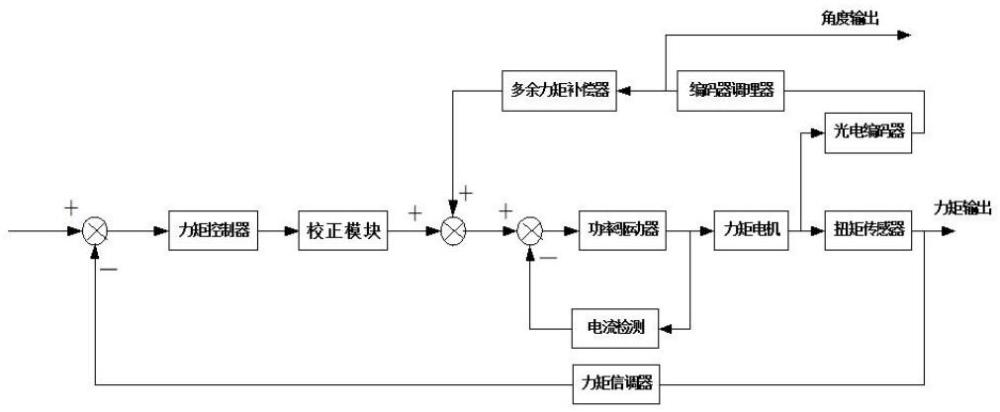
2、本发明的技术方案是这样实现的:本发明公开了一种舵机加载台控制系统,包括工控机、力矩加载驱动器和扭矩传感器;所述扭矩传感器用于采集舵机所受的扭矩,并将采集到的舵机所受的扭矩反馈给工控机;所述工控机内设有比较模块、力矩控制模块和校正模块,其中,所述比较模块用于获取扭矩指令信号与舵机所受的扭矩,并将扭矩指令信号与舵机所受的扭矩进行比较,得到力矩误差;所述力矩控制模块用于根据力矩误差计算出控制指令,并将控制指令输出给力矩加载驱动器;所述校正模块用于根据预设的校正网络对所述控制指令进行校正,以抵消系统的振荡频带;所述力矩加载驱动器用于接收工控机输出的控制指令,并驱动加载电机给舵机进行加载。
3、进一步地,本发明的舵机加载台控制系统还包括角位置传感器,所述角位置传感器用于采集舵机运动时产生的角位移信号,并将采集到的角位移信号反馈给工控机;所述工控机内还设有多余力矩补偿模块,所述多余力矩补偿模块用于根据角位移信号得到对应的速度信号,根据速度信号得到对应的第一补偿信号,并将第一补偿信号叠加到力矩控制模块的输入信号或力矩加载驱动器的输入信号中,实现对多余力矩的补偿。
4、进一步地,所述多余力矩补偿模块用于对角位移信号进行微分得到速度信号,根据预设的多余力矩与舵机速度的传递函数d(s)得到多余力矩 n( s),根据预设的前馈传递函数g(s)得到第一补偿信号c(s), c( s)= g( s) n( s)。
5、进一步地,所述工控机内还设有速度控制模块,所述速度控制模块用于根据舵机速度与电机速度之间的误差,得到第二补偿信号,并将第二补偿信号叠加到力矩加载驱动器的输入信号中,使电机速度与舵机速度一致。
6、进一步地,所述校正网络的传递函数为,其中,n0、n1、n2、d0、d1、d2为常数参数。
7、进一步地,本发明的舵机加载台控制系统还包括信号调理模块和模拟量采集卡,所述信号调理模块用于将扭矩传感器采集的力矩uf进行信号调理转换成模拟量信号,所述模拟量采集卡用于将信号调理模块输出的模拟量信号上传到工控机。
8、进一步地,本发明的舵机加载台控制系统还包括模拟量输出卡,所述模拟量输出卡用于将工控机输出的控制信号转换为力矩加载驱动器所需的模拟信号;和/或,还包括脉冲计数卡,所述脉冲计数卡用于将角位置传感器输出的脉冲信号转换为可计量的数字量,并传递给工控机;和/或,还包括光纤卡,所述光纤卡与工控机连接,所述光纤卡用于提供光纤接口,接收外部的远程控制指令。
9、本发明还公开了一种舵负载模拟系统,包括舵机加载台以及如上所述的舵机加载台控制系统,所述舵机加载台控制系统与舵机加载台电连接,所述舵机加载台控制系统用于采集舵机所受的扭矩以及舵机运动时产生的角位移信号,并驱动舵机加载台的加载电机给舵机进行加载。
10、进一步地,所述舵机加载台包括弹性加载元件,所述弹性加载元件的一端通过联轴器与加载电机的电机轴连接,弹性加载元件的另一端与扭矩传感器的一端连接,扭矩传感器的另一端与转接轴的一端连接,转接轴的另一端与主轴连接,所述主轴的另一端与输出轴连接,所述主轴通过轴承支撑在座体上,所述转接轴或主轴上固定有角位置传感器。
11、本发明还公开了一种半实物仿真系统,包括转台系统以及如上所述的舵负载模拟系统,所述舵负载模拟系统用于模拟导弹在实际飞行过程中的舵机负载情况,所述转台系统用于模拟导弹的姿态运动。
12、与现有技术相比,本发明具有以下有益效果:由于本发明采用了上述舵机加载台控制系统,使得本发明的舵负载模拟系统动态频带高、动态响应快且系统加载力矩大,提高了舵机加载台性能。
技术特征:1.一种舵机加载台控制系统,其特征在于,包括工控机、力矩加载驱动器和扭矩传感器;
2.根据权利要求1所述的舵机加载台控制系统,其特征在于:还包括角位置传感器,所述角位置传感器用于采集舵机运动时产生的角位移信号,并将采集到的角位移信号反馈给工控机;
3.根据权利要求2所述的舵机加载台控制系统,其特征在于:所述多余力矩补偿模块用于对角位移信号进行微分得到速度信号,根据预设的多余力矩与舵机速度的传递函数d(s)得到多余力矩n(s),根据预设的前馈传递函数g(s)得到第一补偿信号c(s),c(s)=g(s)n(s)。
4.根据权利要求2所述的舵机加载台控制系统,其特征在于:所述工控机内还设有速度控制模块,所述速度控制模块用于根据舵机速度与电机速度之间的误差,得到第二补偿信号,并将第二补偿信号叠加到力矩加载驱动器的输入信号中,使电机速度与舵机速度一致。
5.根据权利要求1所述的舵机加载台控制系统,其特征在于:所述校正网络的传递函数为,其中,n0、n1、n2、d0、d1、d2为常数参数。
6.根据权利要求1所述的舵机加载台控制系统,其特征在于:还包括信号调理模块和模拟量采集卡,所述信号调理模块用于将扭矩传感器采集的力矩uf进行信号调理转换成模拟量信号,所述模拟量采集卡用于将信号调理模块输出的模拟量信号上传到工控机。
7.根据权利要求1所述的舵机加载台控制系统,其特征在于:还包括模拟量输出卡,所述模拟量输出卡用于将工控机输出的控制信号转换为力矩加载驱动器所需的模拟信号;
8.一种舵负载模拟系统,其特征在于:包括舵机加载台以及如权利要求1至7任一所述的舵机加载台控制系统,所述舵机加载台控制系统与舵机加载台电连接,所述舵机加载台控制系统用于采集舵机所受的扭矩以及舵机运动时产生的角位移信号,并驱动舵机加载台的加载电机给舵机进行加载。
9.根据权利要求8所述的舵负载模拟系统,其特征在于:所述舵机加载台包括弹性加载元件,所述弹性加载元件的一端通过联轴器与加载电机的电机轴连接,弹性加载元件的另一端与扭矩传感器的一端连接,扭矩传感器的另一端与转接轴的一端连接,转接轴的另一端与主轴连接,所述主轴的另一端与输出轴连接,所述主轴通过轴承支撑在座体上,所述转接轴或主轴上固定有角位置传感器。
10.一种半实物仿真系统,其特征在于:包括转台系统以及如权利要求8或9所述的舵负载模拟系统,所述舵负载模拟系统用于模拟导弹在实际飞行过程中的舵机负载情况,所述转台系统用于模拟导弹的姿态运动。
技术总结本发明公开了一种舵机加载台控制系统和舵负载模拟系统及半实物仿真系统,该舵机加载台控制系统包括工控机、力矩加载驱动器和扭矩传感器;扭矩传感器用于采集舵机所受的扭矩,并将采集到的舵机所受的扭矩反馈给工控机;工控机内设有比较模块、力矩控制模块和校正模块,比较模块用于获取扭矩指令信号与舵机所受的扭矩,并将扭矩指令信号与舵机所受的扭矩进行比较,得到力矩误差;力矩控制模块用于根据力矩误差计算出控制指令,并将控制指令输出给力矩加载驱动器;校正模块用于根据预设的校正网络对控制指令进行校正,以抵消系统的振荡频带;力矩加载驱动器用于接收工控机输出的控制指令,并驱动加载电机给舵机进行加载。本发明提高了舵机加载台性能。技术研发人员:刘冲,冯赟,王华,胡良,吴勇,刘辉,蔡庸发,罗良峰受保护的技术使用者:武汉华中航空测控技术有限公司技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/311695.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表