基于机器学习的线谱自动检测方法
- 国知局
- 2024-10-09 14:43:56
本发明涉及基于机器学习的线谱自动检测方法,属于水声目标定位跟踪领域。
背景技术:
1、lofar谱包含了水声目标的各类信息,对lofar谱采用机器学习方法进行技术研究,可以提高线谱特征提取的精确度,获得谱图中研究所需要的有效信息,从而提升水声目标检测的准确率。lofar谱作为一种常用的包含目标信号各种特征信息的载体,其检测误差会随着信噪比的降低而升高,在复杂水下环境下目标信号的重要特征往往被丢失,许多方法的适用信噪比范围被大大限制。
2、现有关于机器学习的线谱检测方法如下:
3、一种是直接用卷积神经网络来分析lofar谱图。它将每个lofar谱分成几个小块,用cnn模型来预测小块中是否含有线谱。研究中的仿真数据为频率不变的信号,因此不适用频率随机波动的线谱检测。
4、另一种方法在预处理阶段采用基于多步决策算法的lofar谱增强方法来恢复lofar谱中的断点,采用增强的lofar谱作为卷积神经网络的输入,通过卷积神经网络进行线谱在线识别。这种方法可以实现线谱断点的恢复,并应用于船舶噪声的识别,但训练及仿真时并未探讨低信噪比下线谱的恢复检测情况。
技术实现思路
1、针对现有线谱检测方法在低信噪比下,线谱特征提取精度低的问题,本发明提供一种基于机器学习的线谱自动检测方法。
2、本发明的一种基于机器学习的线谱自动检测方法,包括,
3、采用信号生成模型生成低信噪比下不规则波动频率线的多组特征信号st;
4、对每组特征信号st进行短时傅里叶变换,得到多帧lofar谱,由多帧lofar谱得到每组特征信号st对应的lofar谱图;lofar谱图包括频率漂移lofar谱图、频率不变lofar谱图和多普勒频移lofar谱图;由每个lofar谱图得到对应的真实目标线谱;lofar谱图的谱级信噪比和形态各不相同;由lofar谱图得到训练集;
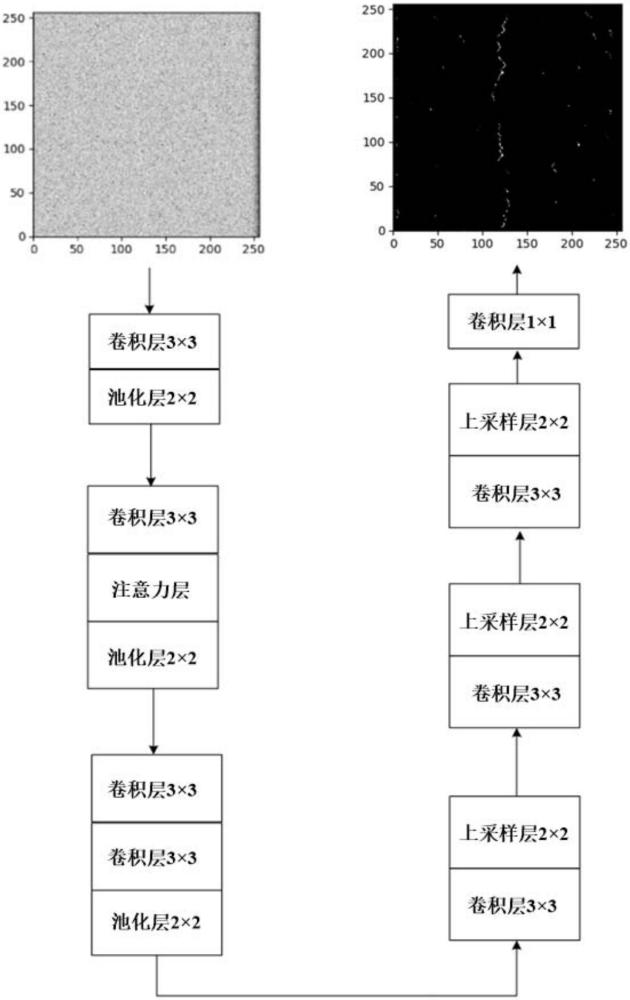
5、搭建基于卷积神经网络的目标线谱检测模型,包括编码器和解码器,编码器包括编码卷积层、注意力层和编码池化层;
6、采用训练集对目标线谱检测模型进行迭代训练,由目标线谱检测模型输出的预测目标线谱与真实目标线谱计算得到检测误差,根据检测误差调整目标线谱检测模型的网络参数,以最小化损失函数;直到检测误差小于期望误差或达到预设迭代次数,得到最终目标线谱检测模型;
7、将采集得到的lofar谱图输入最终目标线谱检测模型,得到目标线谱。
8、根据本发明的基于机器学习的线谱自动检测方法,所述编码器依次包括第一编码卷积层、第一编码池化层、第二编码卷积层、注意力层、第二编码池化层、第三编码卷积层、第四编码卷积层和第三编码池化层;解码器依次包括第一解码卷积层、第一上采样层、第二解码卷积层、第二上采样层、第三解码卷积层、第三上采样层和第四解码卷积层。
9、根据本发明的基于机器学习的线谱自动检测方法,所述注意力层包括注意力卷积层、全链接层和加权层;
10、第二编码卷积层输出的特征经注意力卷积层和全链接层输入至加权层,注意力卷积层输出的特征同时输入至加权层,加权层输出的特征再输入至第二编码池化层。
11、根据本发明的基于机器学习的线谱自动检测方法,信号生成模型采用paris提出的信号生成模型;
12、每组特征信号st表示为:
13、st=at sin(2πft+φt)+εt,t=0,...,t-1,
14、式中t表示时间点,at为幅值,ft表示瞬时频率,每相邻后一个时间点瞬时频率由前一个时间点瞬时频率加随机扰动得到,φt为相位,εt为加性零均值高斯白噪声;t为时间点数;
15、εt~n(0,σ2),
16、其中n表示高斯分布,σ2为方差。
17、根据本发明的基于机器学习的线谱自动检测方法,由每组特征信号st进行短时傅里叶变换得到lofar谱图的方法为:
18、
19、式中stft表示短时傅里叶变换,ω表示窗函数,τ为窗的中心位置。
20、根据本发明的基于机器学习的线谱自动检测方法,短时傅里叶变换的具体过程为:
21、对每组特征信号st进行采样得到k帧采样信号序列lk(m),1≤k≤k;每帧采样信号包括m个采样点,1≤m≤m;
22、对每帧采样信号进行归一化,得到归一化信号yk(m):
23、
24、再对归一化信号yk(m)进行中心化,得到中心化信号xk(m):
25、
26、对中心化信号xk(m)进行傅里叶变换,得到第k帧lofar谱ψk(ζ):
27、ψk(ζ)=fft[xk(m)],
28、将所有ψk(ζ)在时间域中进行排列,得到lofar谱图。
29、根据本发明的基于机器学习的线谱自动检测方法,目标线谱检测模型中,第四解码卷积层的卷积核大小为1×1,其它卷积层的卷积核大小均为3×3;训练集中样本上和目标线谱检测模型通道上的步幅均设置为1;激活函数选择relu;池化层的最大池化尺寸均为2×2。
30、根据本发明的基于机器学习的线谱自动检测方法,损失函数为交叉熵损失函数l:
31、
32、式中p为预设迭代次数,yi为真实目标线谱的训练标签,bi为目标线谱的预测输出。
33、根据本发明的基于机器学习的线谱自动检测方法,根据检测误差调整目标线谱检测模型的网络参数的方法为:
34、使用误差的反向传播方法,利用检测误差计算目标线谱检测模型中各网络层神经元的梯度误差,基于链式法则向模型输入端计算梯度,对计算得到的梯度应用梯度下降算法迭代更新目标线谱检测模型的网络参数。
35、根据本发明的基于机器学习的线谱自动检测方法,目标线谱检测模型输出的预测目标线谱为强度在0~1之间的lofar谱。
36、本发明的有益效果:本发明方法用于水声目标的自动检测。它在利用卷积神经网络实现多种形态线谱检测的同时,利用注意力机制对重要特征分配更高权重,使网络在低信噪比时能进行线谱特征的自动提取,并达到较高精度。
37、本发明方法在引入机器学习卷积神经网络的基础上搭建了编码-解码网络,能够实现端到端的提取任务,并作为改进加入注意力机制,加大了特征谱线的权重,增强了网络的特征提取能力,在线谱频率波动及低信噪比时也能实现较好的线谱检测效果,同时网络体积相对较小,便于训练使用。
技术特征:1.一种基于机器学习的线谱自动检测方法,其特征在于,
2.根据权利要求1所述的基于机器学习的线谱自动检测方法,其特征在于,
3.根据权利要求2所述的基于机器学习的线谱自动检测方法,其特征在于,
4.根据权利要求3所述的基于机器学习的线谱自动检测方法,其特征在于,
5.根据权利要求4所述的基于机器学习的线谱自动检测方法,其特征在于,
6.根据权利要求5所述的基于机器学习的线谱自动检测方法,其特征在于,
7.根据权利要求6所述的基于机器学习的线谱自动检测方法,其特征在于,
8.根据权利要求7所述的基于机器学习的线谱自动检测方法,其特征在于,
9.根据权利要求1所述的基于机器学习的线谱自动检测方法,其特征在于,
10.根据权利要求1所述的基于机器学习的线谱自动检测方法,其特征在于,
技术总结一种基于机器学习的线谱自动检测方法,属于水声目标定位跟踪领域。本发明针对现有线谱检测方法在低信噪比下,线谱特征提取精度低的问题。包括采用信号生成多组不同的特征信号;对每组特征信号进行短时傅里叶变换,得到多帧LOFAR谱,进而得到LOFAR谱图;由LOFAR谱图得到训练集;搭建基于卷积神经网络的目标线谱检测模型,包括编码器和解码器,编码器包括编码卷积层、注意力层和编码池化层;采用训练集对目标线谱检测模型进行迭代训练,计算检测误差,调整模型网络参数,直到检测误差小于期望误差或达到预设迭代次数,得到最终目标线谱检测模型,用于LOFAR谱图的目标线谱检测。本发明用于水声目标的自动检测。技术研发人员:师俊杰,孙大军,梁民帅,熊凌霜,吕云飞受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/306283.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表