一种机载相频扫雷达二维空域电子稳定装置、方法、存储介质和电子设备与流程
- 国知局
- 2024-10-09 15:10:36
本发明涉及机载相控阵雷达,尤其涉及一种机载相频扫雷达二维空域电子稳定装置、方法、存储介质和电子设备。
背景技术:
1、相控阵雷达天线的突出特征是无需旋转天线阵面即可进行波束扫描,其快速的扫描能力和灵活的波束转换性能,是相控阵雷达具备高度自适应工作环境和目标环境的技术基础,这一切都得益于波束控制系统的应用。与机械扫描雷达相比,相控阵雷达在扫描速率、目标处理能力、系统可靠性及复杂环境适应性等方面表现出色,是现代雷达技术的重要发展方向。
2、相较于陆基相控阵雷达,机载相控阵雷达的机动性更为出色,机载雷达可以随着飞机的移动而调整,能够迅速部署至所需区域;同时,借助其高度优势,可以有效克服地形限制,提供更广泛的监视范围。
3、然而,与地面固定平台相比,机载平台由于飞机偏航、横滚、俯冲、爬升等姿态变化或直线运动、转弯、悬停等运动状态改变,安装在飞机平台上的雷达波束指向也会相应发生变化。若在此情况下未采取保持天线扫描空域稳定的措施,则极易导致天线波束偏离目标区域,从而降低雷达测量精度甚至造成目标丢失。传统的解决方案通常是为雷达天线配备三轴硬件稳定平台,以隔离雷达天线运动和载机运动,通过闭合伺服回路使天线波束指向不受载机姿态的影响;但这种方法存在体积较大、质量较重、成本较高等问题。
4、再者,考虑到飞机内部空间及承载负荷的限制,对雷达载荷的体积、重量、可靠性以及集成度提出了更为严格的要求。因此,研发一款设计简单、小型化、高性能、高可靠性、体积及重量符合载荷要求的电子波束稳定系统已显得尤为重要。
技术实现思路
1、本发明的目的是提供一种机载相频扫雷达二维空域电子稳定装置、方法、存储介质和电子设备,能够同时实现机载相控阵相频扫雷达俯仰和方位方向上二维波束的电子空域稳定功能。
2、本发明采用的技术方案为:
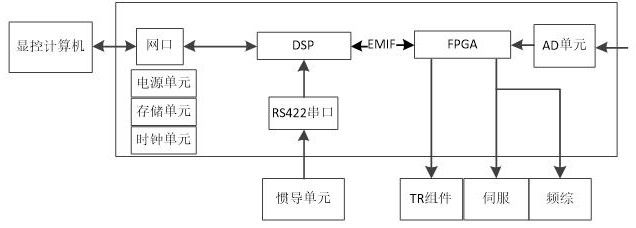
3、一种机载相频扫雷达二维空域电子稳定装置,包括网口单元和rs422串口单元,ad单元,dsp单元,fpga单元,其中:
4、所述网口单元对外输入/输出端连接到显控计算机,接收显控计算机控制指令,并上报目标数据信息;网口单元对内输出端连接到dsp单元,实现对显控计算机控制指令的网络接收和解析、指向角变换和波束控制码生成的功能;
5、所述rs422串口单元的输入端连接到外部惯性导航的输出端,接收惯性导航输出的横滚角、航向角和俯仰角信息,然后通过写入到dsp单元的输入端,完成显控计算机下发指向角信息到雷达阵面指向角信息的变换功能;
6、所述ad单元输入端连接到外部伺服角度的输出端,将数字化后伺服当前角度通过emif总线由fpga单元传送给dsp单元,dsp单元采用俯仰角度闭环控制算法生成伺服控制参数,通过emif总线写入fpga伺服控制单元,实现俯仰方向上伺服的闭环控制;
7、所述dsp单元输入端连接到网口对内输出端和fpga单元,接收显控计算机下发的控制指令信息,并读入fpga单元的伺服当前角度信息;dsp单元输出端连接到fpga单元的输入端,将dsp单元计算输出的阵面坐标系方位角、工作频点信息和伺服控制信息发送给fpga单元做进一步处理和控制;
8、所述fpga单元输入端连接到dsp单元的输出端,读入阵面坐标系方位角、工作频点和伺服控制信息做;fpga单元输出端连接到tr组件、频综和伺服,实现方位方向上tr组件控制和俯仰方向上频综频率扫描控制和伺服控制,进而实现两维波束指向的稳定。
9、所述的dsp单元包括指令接收解析单元、指向角变换单元和俯仰闭环计算单元;指令接收解析单元输入端连接到网口单元对内输出端,通过网络读入控制指令信息;指令接收解析单元输出端与指向角变换单元和俯仰闭环计算单元依次连接,实现网口输入控制指令的解析、显控计算机下发的地理坐标系指向角信息到阵面坐标系指向角信息的变换以及俯仰闭环控制参数计算的功能;指向角变换单元输入端还连接到rs422串口单元的输出端,读入惯导单元采集的航向角、俯仰角和横滚角信息;俯仰闭环计算单元还通过emif总线从fpga单元读入伺服当前角度信息。
10、所述的fpga单元包括幅相控制码计算、tr组件控制单元、频综控制单元和伺服控制单元,幅相控制码计算单元输入端连接到dsp单元的输出端,读入工作频率和阵面坐标系方位指向角信息,采用查表和并行定点运算相结合的方法计算出各通道tr组件的幅相控制码;tr组件控制单元的输入端连接到幅相控制码计算的输出端,读入各通道tr组件幅相控制码信息;tr组件控制单元输出端连接到外部tr组件,实现各通道tr组件幅相控制码的分发和控制,进而完成方位上波束稳定功能;频综控制单元的输入端连接到dsp单元的输出端,频综控制单元的输出端连接到频综,实现俯仰上频率扫描控制;伺服控制单元的输入端连接到伺服ad单元,读入伺服当前角度信息,并通过emif总线写入到dsp俯仰闭环计算单元,经过俯仰闭环计算后,通过emif总线再次从dsp俯仰闭环计算单元读入伺服控制参数信息;伺服控制单元输出端连接到外部伺服,实现俯仰方向上伺服控制;频综频率扫描和伺服控制一起实现俯仰上波束稳定功能。
11、还包含时钟单元、存储单元和电源单元,所述时钟单元的输出连接到ad单元和fpga单元的时钟输入端,为ad单元和fpga单元提供时钟输入;dsp单元和rs422串口单元的时钟输入采用单独的晶振输入;
12、所述存储单元包含dsp程序存储器单元和fpga程序存储器单元,分别连接到dsp单元和fpga单元,分别为dsp单元和fpga单元提供应用程序的存储;所述dsp存储单元包括dsp数据存储器和dsp程序存储器,连接到dsp,分别为dsp提供数据存储和程序存储;所述fpga存储单元包含fpga数据存储器和fpga程序存储器,连接到fpga单元,为fpga提供数据存储和程序存储;
13、所述电源单元包含dsp电源单元、fpga电源单元、ad单元电源、rs422串口单元电源以及存储器单元电源,为以上单元提供正常工作时所需的各种电源。
14、所述网口芯片采用88e1111,rs422串口芯片采用max3491,ad芯片采用ad7980,fpga芯片采用xc7vx690t,dsp芯片采用tms320c6678,dsp程序存储器采用mt25qu128aba1ese,dsp数据存储器采用mt41k128m16jt,fpga程序存储器采用mt25qu256aba1ew7,fpga数据存储器采用mt41k256m16tw,电源芯片采用tps51200、ltm4644与ltm4642,为网口单元、rs422串口单元、ad单元、dsp单元与fpga单元、存储单元提供正常工作所需的各种电源。
15、一种基于所述的机载相频扫雷达二维空域电子稳定装置的稳定方法,包括以下步骤:
16、步骤1:使用dsp指令接收解析单元对显控计算机通过网络下发的地理坐标系下方位角和俯仰角信息进行接收和解析;
17、步骤2:dsp指向角变换单元对接收的地理坐标系下方位角和俯仰角信息,结合惯导单元通过rs422串口输入的航向角、俯仰角和横滚角等天线阵面的姿态角信息,通过坐标变换,得到天线阵面坐标系的方位角和俯仰角信息;
18、步骤3:通过查找天线测试得到的俯仰指向和工作频率对应关系表,dsp俯仰闭环计算单元得到频综工作频率和阵面坐标系下伺服设定角度,通过比对阵面坐标系下伺服设定角度和通过ad单元读入的伺服当前角度,产生伺服控制需要的方向控制、速度控制和启动/停止控制等伺服控制参数,通过emif总线写入fpga单元;
19、步骤4:使用fpga幅相控制码计算单元根据工作频率和阵面坐标系方位角信息,计算各通道tr组件幅相控制码信息;fpga tr组件控制单元将各tr组件通道的幅相控制码进行分发,并搭配tr组件工作时序实现tr组件幅相控制和天线方位上波束对准功能;
20、步骤5:fpga频综控制单元读入工作频率信息后,搭配频综工作时序完成俯仰上频率扫描控制功能;fpga伺服控制单元读入伺服控制的方向控制、速度控制、和伺服启动/停止等参数后实现伺服控制功能;频综和伺服一起实现天线俯仰方向上波束对准功能。
21、所述步骤2中的坐标变换,具体包括以下步骤:
22、步骤21:建立“东北天”地理坐标系和“右前上”载体坐标系,地理坐标系和载体坐标系都遵循右手定则;那么显控计算机下发的是地理坐标系下的方位角θa和俯仰角信息,载体坐标系与地理坐标系的关系可以由俯仰角β、航向角α和横滚角γ等姿态角来确定;
23、步骤22:雷达与飞机平台采用刚性连接,初始安装时雷达载荷相位中心和一维俯仰伺服零点对齐,天线阵面法线方向与飞机载体坐标系平行,那么雷达阵面坐标系与飞机载体坐标系平行;
24、步骤23:由显控计算机下发的地理极坐标系下方位角θa和俯仰角信息组成方向矢量通过极坐标到直角坐标的转换,得到雷达指向目标空域的单位矢量(xa,ya,za),其中
25、步骤24:根据读入的惯导信息,将地理坐标系下雷达指向目标空域的单位矢量(xa,ya,za)依次旋转航向角α、俯仰角β和横滚角γ,得到阵面直角坐标系下指向目标空域的方向矢量(xb,yb,zb),其中
26、
27、步骤25:将阵面直角坐标系下指向目标空域的方向矢量(xb,yb,zb)转换为阵面极坐标系下方向矢量
28、所述步骤4中所述的fpga幅相控制码计算单元具体计算时,包括以下步骤:
29、步骤41:将天线阵列的频率信息f和步骤25得到的指向角θb信息依次进行量化和放大预处理,分别存入频率查找表round(2k+p*d*f/c)和波位查找表round(2qsinθb)中;依次测量各tr组件通道在各个工作频率下的初始相位φn和初始幅度an,将测得的各通道的初始相位和初始幅度依次进行量化和放大预处理,分别存入初相查找表round(φn2k+p+q/2π)和初始幅度查找表round(an/δa)中,其中移相器位数位k,p、q分别为频率表和波位表放大倍数,d为相邻天线单元的间距,δa为幅度衰减器最小步进,n为天线单元的序号;
30、步骤42:根据工作频率和指向角θb,分别查找频率查找表和波位信号查找表,获取频率信息预运算值round(2k+p*d*f/c)和波位信息预运算值round(2qsinθb);
31、步骤43:将步骤42中得到的频率信息预运算值和波位信息预运算值相乘后,再与当前天线单元的序号相乘,得到当前序号天线单元的理想配相相位round(2k+p*d*f/c)*round(2qsinθb)*n;
32、步骤44:以当前工作频率为行索引,以当前天线单元序号为列索引,查找初相查找表,得到当前天线单元的初始相位round(φn2k+p+q/2π);
33、步骤45:将步骤43计算的理想配相相位和步骤44查表得到的初始相位相加,得到当前序号天线单元的实际配相相位round(2k+p*d*f/c)*round(2qsinθb)*n+round(φn2k+p+q/2π);
34、步骤46:将步骤45得到实际配相相位右移p+q位后,与2k+p+q-1进行与按位与运算,即得到tr组件通道的相位控制码;
35、步骤47:以当前工作频率为行索引,以当前天线单元序号为列索引,查找初始幅度查找表round(an/δa),得到当前天线单元的幅度控制码。
36、一种计算机可读存储介质,其上存储有计算机程序,所述的计算机程序被处理器执行时,使所述计算机可读存储介质所在设备执行如上任意一项所述的机载相频扫雷达二维空域电子稳定方法。
37、一种电子设备,包括:存储器和处理器,所述存储器上存储有可在所述处理器上运行的程序,所述处理器执行所述程序时实现如上任一所述的机载相频扫雷达二维空域电子稳定方法。
38、本发明通过采用dsp与fpga单元结合惯导、伺服、频综与tr组件单元,实现了俯仰与方位方向上二维天线波束的电子扫描及天线波束的指向稳定;本发明借助指向角变换技术,可以精确补偿雷达姿态角改变所引发的天线波束指向角变化,有效地抵消了机载平台运动带来的波束指向角偏移,使得飞机姿态变化后天线波束仍能指向目标区域,从而提升了波束指向精度并避免了目标丢失。进一步的,通过俯仰上频率扫描和方位上相位扫描实现了以电子扫描替代传统机械扫描的功能,大幅度减小了硬件设备体积和重量,提高了波束指向精度和转换速度。本发明通过俯仰上频率扫描与伺服波束微调、方位上相位扫描共同实现了二维天线波束的电子扫描和指向稳定,取代了体积庞大的三轴稳定平台,极大地降低了硬件设备的体积、重量和数量,减少了设备间连线,降低了研发成本和设计复杂度。
本文地址:https://www.jishuxx.com/zhuanli/20241009/307934.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表