一种基于Transformer自适应对抗图神经网络的交通流预测方法
- 国知局
- 2024-10-09 15:19:22
本发明涉及深度学习领域,尤其涉及一种基于transformer自适应对抗图神经网络的交通流预测方法。
背景技术:
1、随着社会的发展以及城市规模的不断扩大,城市的交通拥堵日益增多,影响了人们日常的出行。智能交通系统(intelligent transportation system)可用于缓解交通拥堵,方便人们出行,提高交通的安全性。交通流预测作为its中重要的一部分,能够实时对城市的道路结点的车流量进行准确的预测,从而辅助车辆进行交通的决策并发现路段的交通问题,以此来减少道路拥堵的情况。
2、现有的大多数交通流预测的方法都是基于深度学习实现的,但仍存在一些问题。首先,没有提出对于交通流数据的时间模式进行明确的建模,导致在捕获时空相关性方面有所欠缺。其次,没有提出对于道路网络中关键结点的建模,这些结点往往是影响交通拥堵的重要因素。
3、此外,道路网络是不断变化的,捕获交通流的空间动态性仍是一个问题。最后,很难保证预测的数据与历史数据具有相同的分布。以上问题都限制了交通流预测方法的准确性。
技术实现思路
1、本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种基于transformer自适应对抗图神经网络的交通流预测方法,并在传统的结构上针对交通流数据进行改进,以此来提高交通流预测的准确性。
2、本发明解决其技术问题所采用的技术方案是:
3、本发明提供一种基于transformer自适应对抗图神经网络的交通流预测方法,该方法包括以下步骤:
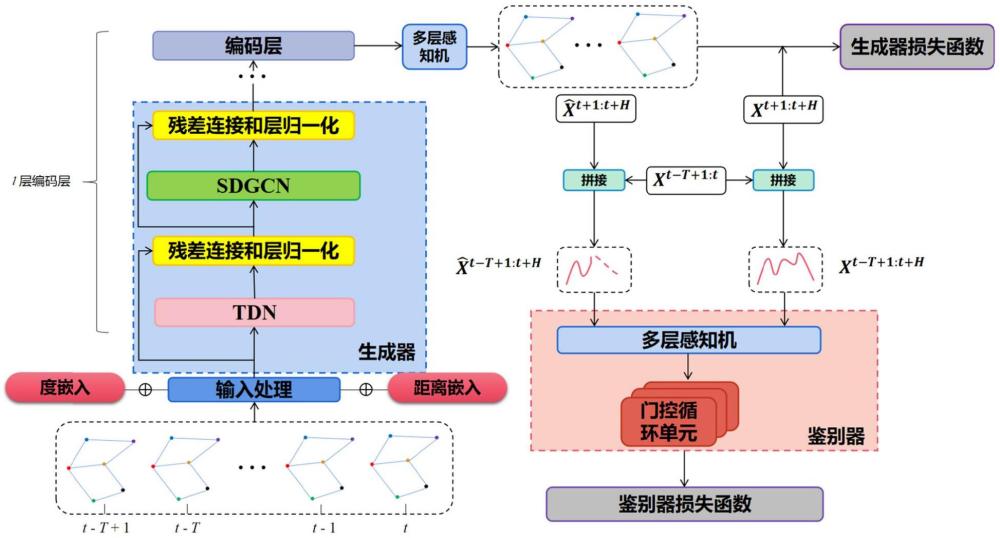
4、步骤1:根据道路网络获取原始数据,将原始数据进行度嵌入和距离嵌入操作,得到预处理过的交通流数据;
5、步骤2:构建生成器,将交通流数据输入生成器的tdn模块进行注意力机制操作得到聚合时间信息y;
6、步骤3:构建sdgcn图神经网络,将y作为sdgcn图神经网络的输入得到聚合空间信息z,再将z输入进一个具有两个隐藏层的mlp得到预测数据
7、步骤4:获取真实数据xr,构建鉴别器,将预测数据与交通流数据x进行连接操作记为xp,并将xp和真实数据xr一同输入到鉴别器中;
8、步骤5:计算鉴别器和生成器的损失函数ld和lg,再计算整个模型的损失函数l,最后通过随机梯度下降来更新模型的参数,得到训练好的基于transformer自适应对抗图神经网络模型;通过训练好的模型实现对交通流的预测。
9、进一步地,本发明的步骤1的具体实现包括以下子步骤:
10、步骤1.1:对于道路网络中的每一个结点vi,根据道路网络的邻接矩阵a计算出每个结点对应的度deg(vi),根据结点的度deg(vi)生成一个可学习的参数将其与原始数据xi相加,以此实现degree embedding,即度嵌入算法;
11、步骤1.2:计算结点vi和vj的距离记为f(vi,vj),根据f(vi,vj)生成可学习的参数在计算vi和vj的注意力分数sij时,将作为偏移加入到注意力分数的计算中,即以此实现distance embedding,即距离嵌入算法。
12、进一步地,本发明的步骤2的具体实现过程包括:
13、将交通流数据x分别输入两个不同的一维卷积模块,再将其得到的结果用relu和sigmod函数进行处理,并将所得到的结果进行拼接作为多头自注意力机制的输入i,该操作的公式表示为:
14、
15、其中,表示为拼接操作,relu和σ为激活函数,θ1和θ2为两个不同的一维卷积操作,由此注意力机制操作表述为:
16、y=attention(wqi,wki,wvi)
17、其中,attention()表示注意力机制操作,wq,wk,wv分别表示q,k,v对应的可学习的权重矩阵。
18、进一步地,本发明的步骤3的具体实现包括以下子步骤:
19、步骤3.1:根据tdn的输出y与自身转置相乘构造掩模矩阵c,以此表示交通道路网络的动态性,具体操作表示为:
20、
21、其中,softmax()表示为归一化函数,dmodel为模型的向量维度,n为道路网络中结点的个数;
22、步骤3.2:将所得到掩模矩阵c融入到图卷积运算当中,与带有自连接的邻接矩阵做哈达玛积操作,公式表示为:
23、
24、其中,σ为激活函数,表示带有自连接的度矩阵的逆矩阵,表示带有自连接的邻接矩阵,⊙为哈达玛积,w和b为可学习的参数;
25、步骤3.3:将步骤2和步骤3循环设定的层数l次,将最后所得到的sdgcn输出z通过带有两个隐藏层的mlp得到预测结果表示为:
26、
27、其中,w1,w2,b1,b2为可学习的参数。
28、进一步地,本发明的步骤4的具体实现过程为:
29、将预测数据与交通流数据x进行拼接操作,将所得结果记为xp,并将xp和真实数据xr一同输入到鉴别器中,即:
30、xr=xt-t+1:t∥xt+1:t+h
31、其中,t表示交通流数据的时间步长,h表示预测的时间步长,∥表示拼接操作。
32、进一步地,本发明的步骤5的具体实现包括以下子步骤:
33、步骤5.1:根据鉴别器的输出d(xp)和d(xr)计算鉴别器的损失函数ld和生成器的损失函数lg,公式表示为:
34、
35、其中,和表示xr和xp分布的期望;
36、步骤5.2:将l1损失和生成器损失lg相加得到全局损失l,l=l1+lg,其中l1表示为:
37、
38、步骤5.3:通过随机梯度下降,更新生成器和鉴别器的网络参数θg和θd,具体操作为:
39、
40、其中,ηg和ηd分别表示生成器和鉴别器的学习率;
41、设定训练的轮次epochs,即当训练轮次达到轮次epochs时,停止更新模型的参数;此外,还设置了早停轮次,当经过早停轮次训练时,模型的效果还没得到提升,就停止训练。
42、本发明提供一种基于transformer自适应对抗图神经网络的交通流预测系统,包括:
43、存储器,用于存储可执行计算机程序;
44、处理器,用于执行存储器中存储的可执行计算机程序时,实现上述的基于transformer自适应对抗图神经网络的交通流预测方法。
45、本发明提供一种计算机可读存储介质,存储有计算机程序,用于被处理器执行时,实现上述的基于transformer自适应对抗图神经网络的交通流预测方法。
46、本发明产生的有益效果是:
47、本发明的目的是设计一种基于transformer架构的对抗神经网络,并在传统的结构上针对交通流数据进行改进,以此来提高交通流预测的准确性。
48、(1)本发明设计了degree embedding和distance embedding,明确提出了对道路网络中关键结点进行建模,提高了模型的图表征能力。
49、(2)本发明将注意力机制和一维卷积神经网络结合,设计了一个时间依赖网络(tdn),捕获了交通流的时间模式。
50、(3)本发明在图卷积神经网络的基础上,设计了一种掩模矩阵以此来捕获交通流数据的空间动态性。
51、(4)本发明设计了一种对抗训练的方式,提高了模型的预测准确性以及预测数据的全局一致性。
本文地址:https://www.jishuxx.com/zhuanli/20241009/308327.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表