一种三维管段机械组对机的制作方法
- 国知局
- 2024-10-09 15:22:58
本发明涉及机械夹持装置领域,尤其涉及一种三维管段机械组对机。
背景技术:
1、在工业管道行业中,管道预制的智能化需求正日益增长,各种不同形状的工件要求机械组对技术能够适应更为复杂和精确的组对任务。然而,现有的管段机械式组对机主要局限于一维管段的水平面组对,无法解决二维/三维管段的组对问题。
2、例如,现有的技术方案中,采用管道预制快速组对器、管道预制管段多功能组对器等,虽然在一维管段的组对方面取得了一定的进展,但普遍存在无法实现二维/三维管段组对的问题,特别是结构较复杂的三维管段的组对。
3、此外,这些技术在进行管件与管子的组对时,往往依赖于手工操作,导致组对速度慢、精度低,且劳动强度大。
4、鉴于现有技术的局限性和市场需求的增长,开发一款新型的三维管段组对机显得尤为必要。这种新型组对机应能够有效地解决现有技术中存在的问题,实现三维管段的精确、快速组对,同时降低劳动强度,提高组对效率和质量。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题提供一种新型的能同时在三维上实现管段组对的三维管段组对机,解决了传统组对设备无法满足复杂三维管段组对需求的问题,同时大幅度提高了生产效率,是人工组对效率的5-10倍。并且,该三维管段组对机有效地实现包括一维管段、二维管段和三维管段在内的多场景精确组对,提高了组对精确性和安全性。
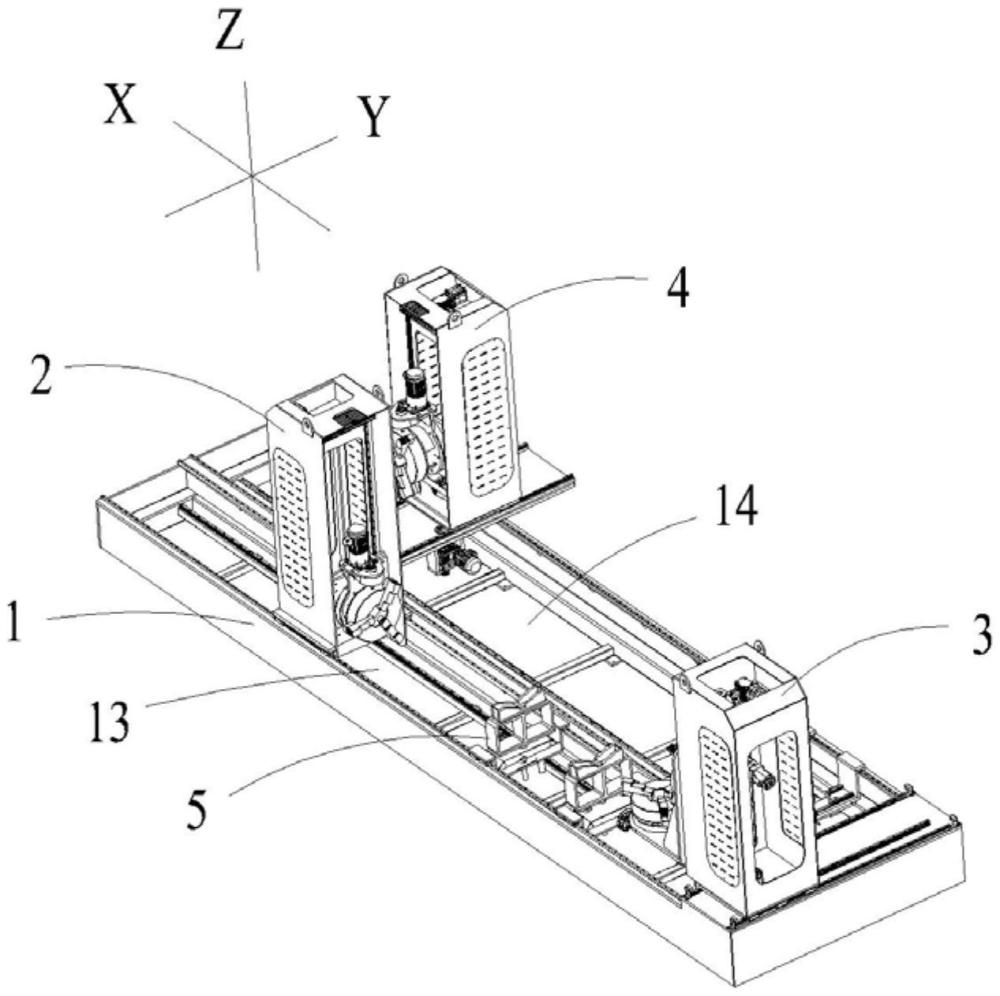
2、为实现上述目的,本发明提供了一种三维管段机械组对机,其包括:
3、组对基座,所述组对基座上设有第一侧移机构和第二侧移机构,所述第二侧移机构可沿第一方向在所述组对基座上进行移动;
4、第一组对机头,沿第一方向可活动地设置在所述组对基座上;所述第一组对机头包括第一组对卡盘和设置在第一组对卡盘上的第一夹持机构,所述第一夹持机构被配置为在第一方向上对工件进行夹持;
5、第二组对机头,沿第二方向可活动地设置在所述第一侧移机构上;所述第二组对机头包括第二组对卡盘和设置在第二组对卡盘上的第二夹持机构,所述第二夹持机构被配置为在所述第一方向上与所述第一夹持机构相对设置,以对工件进行夹持;所述第二组对机头还包括第三组对卡盘和设置在第三组对卡盘上的第三夹持机构,所述第三夹持机构被配置为可在第三方向上对工件进行夹持;
6、第三组对机头,沿所述第二方向可活动地设置在所述第二侧移机构上;所述第三组对机头包括第四组对卡盘和设置在所述第四组对卡盘上的第四夹持机构,所述第三组对机头被配置为在第一平面上可转动,以通过所述第四夹持机构对工件进行夹持;
7、其中,所述第一方向、第二方向和第三方向相互垂直,所述第一平面由所述第一方向和第二方向限定出。
8、在本发明的较佳实施方式中,所述组对基座包括至少两个沿第一方向设置的工作区域,所述第一侧移机构连接设置在所有所述工作区域,以使所述第二组对机头可沿所述第二方向移动至各所述工作区域;
9、所述第二侧移机构设置在至少一个与所述第一组对机头所在不同的所述工作区域上。
10、在本发明的较佳实施方式中,所述工作区域包括第一工作区域和第二工作区域,所述第一组对机头设置在所述第一工作区域中,所述第一组对机头在所述第一方向上在所述第一工作区域进行移动;
11、所述第一侧移机构连接设置在所述第一工作区域和第二工作区域上,第二组对机头沿所述第二方向在所述第一工作区域和第二工作区域之间移动;
12、所述第二侧移机构设置在所述第二工作区域上,所述第三组对机构在所述第二工作区域可沿所述第二方向移动,并在所述第一平面上可转动。
13、在本发明的较佳实施方式中,所述第一组对机头还包括第一机架,以及设置在所述第一机架上的第一升降机构、第一卡盘回转机构、卡盘平移机构和第一卡盘夹紧机构;所述第一组对卡盘设置在所述第一机架上,并与所述第一升降机构、第一卡盘回转机构和卡盘平移机构机械连接,所述第一夹持机构与所述第一卡盘夹紧机构机械连接;
14、其中,所述第一升降机构驱动所述第一组对卡盘在所述第三方向上移动,所述第一卡盘回转机构驱动所述第一组对卡盘在第二平面上转动,所述卡盘平移机构驱动所述第一组对卡盘在所述第二方向上移动,所述第一卡盘夹紧机构驱动所述第一夹持机构夹紧或松开工件。
15、在本发明的较佳实施方式中,所述第二组对机头包括第二机架,以及设置在所述第二机架上的第二升降机构、第二卡盘回转机构、第二卡盘夹紧机构、第三卡盘回转机构和第三卡盘夹紧机构;所述第二组对卡盘和第三组对卡盘设置在所述第二机架上,并直接或间接机械连接所述第二升降机构;所述第二组对卡盘与所述第二卡盘回转机构和第二卡盘夹紧机构机械连接,所述第三组对卡盘与所述第三卡盘回转机构和第三卡盘夹紧机构机械连接;
16、其中,所述第二升降机构驱动所述第二组对卡盘和第三组对卡盘在所述第三方向上移动,所述第二卡盘回转机构驱动所述第二组对卡盘在所述第二平面上转动,所述第二卡盘夹紧机构驱动所述第二夹持机构夹紧或松开工件;所述第三卡盘回转机构驱动所述第三组对卡盘在所述第一平面上转动,所述第三卡盘夹紧机构驱动所述第三夹持机构夹紧或松开工件。
17、在本发明的较佳实施方式中,所述第二机架包括机头机架和卡盘机架,所述卡盘机架通过所述第二升降机构活动性设置在所述机头机架上,所述第二组对卡盘和第三组对卡盘设置在所述卡盘机架上,所述第二卡盘回转机构连接所述卡盘机架;
18、所述第二卡盘回转机构驱动所述卡盘机架可相对所述机头机架在第二平面内进行旋转,以使所述卡盘机架带动所述第二组对卡盘和第三卡盘以所述第二组对卡盘为中心进行旋转,所述第二平面为由所述第二方向和第三方向所限定出。
19、在本发明的较佳实施方式中,所述第三组对机头包括第三机架,以及设置在所述第三机架上的机头旋转机构、第三升降机构、第四卡盘回转机构和第四卡盘夹紧机构;所述第四组对卡盘设置在所述第三机架上,并与所述第三升降机构、第四卡盘回转机构和第四卡盘夹紧机构机械连接;
20、其中,所述机头旋转机构设置在所述第三机架的底部,以驱动所述第三组对机头相对于所述第二侧移机构在所述第一平面上转动;所述第三升降机构驱动所述第四组对卡盘在所述第三方向上移动,所述第四卡盘回转机构驱动所述第四组对卡盘在第二平面上转动,所述第四卡盘夹紧机构驱动所述第四夹持机构夹紧或松开工件。
21、在本发明的较佳实施方式中,所述组对基座上设有第一传动机构,所述第一组对机头通过所述第一传动机构与所述组对基座传动连接,以在所述第一方向上进行移动;
22、所述第一侧移机构上设有第二传动机构,所述第二组对机头通过所述第二传动机构与所述第一侧移机构传动连接,以在所述第二方向上进行移动;
23、所述第二侧移机构上设有第三传动机构,所述第三组对机头通过所述第三传动机构与所述第二侧移机构传动连接,以在所述第二方向上进行移动。
24、在本发明的较佳实施方式中,在每个所述工作区域上,所述三维管段机械组对机还设有至少一个支撑装置,所述支撑装置沿所述第一方向可活动地设置在所述组对基座上;
25、所述支撑装置包括支撑块和与所述支撑块连接的支撑升降组件,所述支撑升降组件可带动所述支撑块相对所述组对基座在所述第三方向上移动。
26、在本发明的较佳实施方式中,在第一工作区域和第二工作区域上均分别设置有2个支撑装置。
27、在本发明的较佳实施方式中,所述三维管段机械组对机还包括控制机构,所述控制机构与所述组对基座、第一组对机头、第二组对机头和第三组对机头电性连接,所述控制机构被配置为响应于使用者的操作或命令,对所述组对基座、第一组对机头、第二组对机头和第三组对机头中的任一种或多种进行控制。
28、本发明提供的装置具有以下技术效果:
29、1、本发明的三维管段机械组对机通过设置第一组对机头、第二组对机头和第三组对机头,能够在第一方向、第二方向和第三方向上实现管段的精确夹持和组对,解决了传统组对设备无法满足复杂三维管段组对需求的问题,同时大幅度提高了生产效率,是人工组对效率的5-10倍。
30、2、本发明的三维管段机械组对机通过设置在重力面可旋转的第三组对卡盘,配合第四组对卡盘可以实现两端均为管段(弯管+法兰)的工件的夹持,能方便、快捷地进行上下位置、前后位置、左右位置、角度位置、螺栓跨中、弯头摆头量调试,可极大地提高管段的组对效率。
31、3、本发明的三维管段机械组对机以通过plc控制多种传动结构来实现自动化操作,减少了人工干预,提高了组对效率和重复定位的准确性。
32、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
本文地址:https://www.jishuxx.com/zhuanli/20241009/308542.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。