一种四分裂间隔棒安装机器人的制作方法
- 国知局
- 2024-10-09 15:37:56
本发明涉及输变电设备,尤其涉及一种四分裂间隔棒安装机器人。
背景技术:
1、间隔棒是用于分隔导线的工具,能有效的防止导线相互鞭击和抑制导线震动,一般分为二分裂、四分裂、六分裂和八分裂形式,而间隔棒的安装一般依赖两种模式,一种是人工安装,另一种是间隔棒安装机器人安装,间隔棒安装机器人通过一次性携带多根间隔棒实现一次上线,完成间隔棒批量安装,因此在输变电路中间隔棒安装机器人的使用频率相当高。
2、间隔棒的安装在很长一段时间内都是采用人工飞车的方式进行布设,而机械化一点的方式也仅是通过间隔棒安装机器人进行预安装,再通过人工跟随,盘查是否有安装不合格之处,因此亟需研发一种能够保证安装质量、自动化的间隔棒安装装置。
技术实现思路
1、本发明目的在于针对以上问题,提供一种四分裂间隔棒安装机器人。
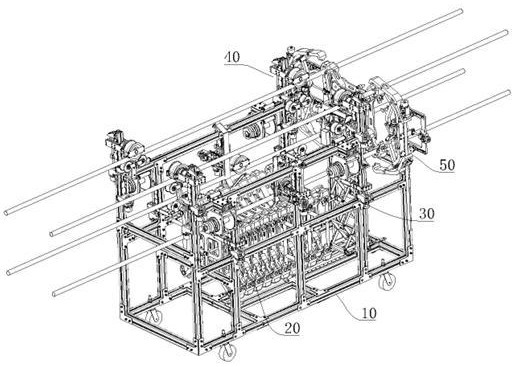
2、本发明包括框架、存放机构、夹持机构、夹线机构和锁合机构,所述框架内设置有存放机构,间隔棒设置于所述存放机构上,所述存放机构可推动存放的间隔棒移动,并可将尾部的单根间隔棒向外推出至与相邻的间隔棒产生一定间隙,所述夹持机构设置于所述框架前进方向的相对一端,所述夹持机构可伸入所述间隙内,并夹持推出的间隔棒,所述夹线组件用于夹持上下端的导线,促使上下导线的间隔变小,所述锁合机构用于抓取间隔棒,并将间隔棒四角的锁扣扣合,使得间隔棒固定在导线上,通过存放机构将存放的间隔棒和即将安装的间隔棒推出一定的间隙,便于夹持组件的夹持,而夹线机构可将同侧的上下两根导线间距减小,从而便于间隔棒套设,其次,通过设置的锁合机构对夹持机构夹持的间隔棒进行抓取和锁合,从而实现从抓取到上线自动化设计,提高了本设计的自动化程度。
3、具体的,所述存放机构包括存放组件和预备组件,所述存放组件用于存放若干间隔棒,所述预备组件伸缩设置于所述存放组件的尾端,所述存放组件推动间隔棒朝向所述预备组件运动,所述预备组件可带着单根间隔棒朝向外部延伸,并与相邻的间隔棒形成间隙,通过设置的存放组件一次性存放多根间隔棒,从而可一次上线实现多次安装,提高整体的工作效率,此外,通过预备组件预推尾端的间隔棒,促使其与相邻的间隔棒形成一定的间隙,从而便于提供给夹持机构夹持,从而易于实现间隔棒上线的自动化程度。
4、具体的,所述存放机构包括存放架、推板、推动丝杆和第一推动电机,所述存放架用于存放间隔棒,所述推板设置于所述存放架前端,所述第一推动电机一端连接于推动丝杆上,所述推动丝杆另一端穿过所述推板,所述第一推动电机可推动所述推动丝杆并可驱动所述推板推动间隔棒朝向所述存放架后端运动。
5、具体的,所述预备组件包括预备架和第二推动电机,所述预备架一端可伸缩连接于所述存放组件尾部,所述第二推动电机设置于所述存放组件尾部,驱动所述第二推动电机可推动所述预备架带着间隔棒伸出并使得该间隔棒与其相邻的间隔棒形成间隙。
6、具体的,所述夹持机构包括升降平台、回转平台、取棒机构,所述升降平台设置于所述框架上,所述回转平台设置于所述升降平台上,所述取棒机构包括推夹组件和取棒组件,所述推夹组件固定于所述回转平台一端,所述回转平台另一端设置有挡块,所述推夹组件的四角设置有引导横杆,还包括横向引导电机和引导推杆,所述取棒组件设置于所述引导横杆上,驱动所述横向引导电机运动可驱动所述引导推杆推动所述取棒组件朝向所述挡块一侧运动,并将间隔棒夹紧,通过挡块插入间隙中,使得间隔棒被固定于挡块和取棒机构之间,增加本设计在使用过程中的稳定性,提高了恶劣天气的抵抗能力。
7、具体的,所述取棒组件包括固定板,所述固定板四角分别转动连接有取棒杆,所述固定板中部设置有引导组件,还包括传动组件,所述传动组件上设置有传动孔,所述取棒杆的一端设置在所述传动孔内,所述传动组件设置于所述引导组件上,驱动所述引导组件运动可带动镜像设置于所述引导组件上的所述传动组件做镜像运动,进而推动所述取棒杆的另一端绕着所述固定板的边角转动,完成取棒,通过设置的取棒杆在取到间隔棒时,通过驱动引导组件促使传动组件在引导组件上做镜像的轴向运动,从而使得上下两侧的取棒杆同时夹取间隔棒,实现取棒杆的共同收缩,提高本设计的协调性。
8、具体的,所述引导组件包括引导轨、竖向引导电机和引导竖杆,所述传动组件包括传动板,所述传动板滑动设置于所述引导轨上,并可在所述引导轨上滑动,所述竖向引导电机输出轴与所述引导竖杆连接,所述引导竖杆上镜像设置有传动板,驱动所述引导竖杆可驱动两所述传动板做镜像运动。
9、所述引导竖杆为两端分别设置有螺纹,且所述引导竖杆上的螺纹旋向相反,通过反向设置的螺纹,在竖向引导电机启动时,可同时促进两边的传动板同步运动,进而便于协同控制上下两端的取棒杆,进而替代同步电机,降低了制造成本与整体重量。
10、具体的,所述夹线机构设置于所述框架尾部,所述夹线机构包括夹线板和驱动组件,所述夹线板对称设置于所述驱动组件上,所述夹线板一端滑动设置于所述驱动组件上,另一端朝向所述框架内部延伸,驱动所述驱动组件运动可带动所述夹线板做镜像的相互远离或靠近运动,进而促使导线相互靠近。
11、所述驱动组件包括驱动马达和驱动杆,所述驱动杆固定于所述框架外部,所述驱动马达输出轴与所述驱动杆端部连接,所述驱动杆为螺纹杆,且以中部为分界线,两端的螺纹旋向相反。
12、具体的,所述锁合机构对撑分布于所述框架的两侧,所述锁合机构包括水平驱动组件、支撑骨、抓取爪和锁合爪,所所述支撑骨呈弓形,其顶部和底部分别转动连接在所述抓取爪中部,两端的所述抓取爪通过第一抓取驱动连接,驱动所述第一抓取驱动可促使所述抓取爪绕着所述支撑骨端部转动,进而抓取间隔棒,上部的所述锁合爪一端连接于所述支撑骨的中上部,下部的所述锁合爪一端连接于所述支撑骨的中下部,两所述锁合爪的另一端通过第二抓取驱动连接,驱动所述第二抓取驱动可促使所述锁合爪绕着所述支撑骨转动,从而对间隔棒的锁扣进行扣合。
13、具体的,所述水平驱动组件包括水平板、水平驱动电机、水平推动杆和水平滑轨,所述水平板一端固定在框架上,所述水平驱动电机设置于所述框体的相对一侧,所述水平滑轨设置于所述水平板的上下两侧,所述水平推动杆穿过所述支撑骨设置,驱动所述水平驱动电机可驱动所述水平推动杆推动所述支撑骨水平移动。
14、所述第一抓取驱动包括第一抓取电机和第一抓取杆,所述抓取爪端部设有用于连接的第一连接体,所述第一连接体螺纹连接于所述第一抓取杆上,所述第一抓取电机连接于所述第一抓杆上。
15、所述第二抓取驱动包括第二抓取电机和第二抓取杆,所述锁合爪端部设置有第二连接体,所述第二连接体螺纹连接于所述第二抓取杆上,所述第二抓取电机连接于所述第二抓取杆上。
16、有益效果
17、通过一体化设计的整体,结构使得紧凑,从而使得单次可携带的间隔棒更多,从而单次上线可架设更多的间隔棒,此外,框架的设置在保证整体强度的同时还能增加稳定性,夹持机构设置于框架前进方向的反向,因此可在安装完成后无需跨越间隔棒,极大地提高了安装效率,此外,夹线机构的设置可促使上下端的导线相互靠拢,进而便于间隔棒上线,最后,锁合机构通过夹持取棒机构上间隔棒的固定点使得间隔棒在安装时无需做其他的调整即可通过锁合机构进行将间隔棒锁在导线上,提高了整体的自动化程度。
本文地址:https://www.jishuxx.com/zhuanli/20241009/309404.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。