一种基于BES-YOLOv8模型的海底目标检测方法
- 国知局
- 2024-10-15 09:29:39
本发明属于基于侧扫声纳图像的目标检测研究领域,尤其涉及多尺度海底目标检测方法。
背景技术:
1、海底目标的探测与识别一直是海洋测绘、水下搜救、水雷检测和管线测量等方面的主要工作内容。侧扫声呐能够在能见度极低的水下环境中实施探测并提供高分辨率的水下目标图像,是海底目标探测的常用仪器设备,在搜寻失事飞机、船只残骸及失事人员,定位海底管线及探测突出的礁石、海底矿石和沉底水雷等方面发挥了重要作用。当前,侧扫声呐图像海底目标的识别仍以人工为主,其过度依赖主观经验且效率低下,严重影响了其在海底目标检测中的广泛应用,特别是无法满足水下搜救和水雷等军事目标检测的实时性应用需求。为了实现侧扫声呐图像海底目标的实时检测,国内外学者对侧扫声呐图像预处理、分类识别和目标检测算法等进行了大量研究,取得了一定的效果。首先,由于受复杂海洋环境以及水下散射机理等因素影响,侧扫声呐图像存在大量的噪声。因此,有效抑制噪声的同时能够很好地保持图像的边缘和细节,将有助于提高目标分类识别及检测的精度。传统的侧扫声呐图像降噪方法主要集中在空间域,如均值滤波、中值滤波、维纳滤波,尽管这些方法实现简单,但大多在降噪与保持图像细节之间矛盾突出。小波变换是频率域降噪的典型方法之一,由于其具有良好的时频特性、多分辨率分析特性和稀疏表示特性,被广泛应用于侧扫声呐图像降噪。
2、在侧扫声呐图像目标检测方面,目前主要以深度学习算法为主。利用深度学习算法进行目标检测一般分为两种,分别是两阶段检测模型和一阶段检测模型两大类。其中,双阶段检测模型首先生成候选目标框的区域建议网络,初步筛选出可能包含目标的候选区域;然后是对这些候选框进行分类和边界框回归的网络,进一步确定候选框中目标的类别和精确位置。虽然两阶段模型结构较复杂、较大、较慢,但在检测精度方面具有一定优势。具有代表性的两阶段模型包括r-cnn、fast-rcnn和faster-rcnn等。
3、单阶段目标检测算法在单一前向传播中完成目标检测任务,无需生成候选区域。它们通过密集的网格或锚框直接预测目标的类别和位置。与双阶段目标检测算法相比,一阶段的算法无需生成候选区域,再进行回归预测,因此单阶段算法通常具有更快的推理速度,适用于实时应用或对速度要求较高的场景。虽然单阶段算法在速度方面具有优势,但它们通常在准确性上略逊于双阶段算法。单阶段目标检测的代表性算法包括yolo(you onlylook once)、ssd(single shot multibox detector)、retinanet等。
4、水下目标智能探测对探测模型在精度上提出了较高的要求,传统的基于深度学习算法的侧扫声纳水下目标检测方法虽然在检测精度上取得了不错的成绩,但是如何在复杂海洋噪声背景下进一步提高不同尺寸目标检测的准确性、降低重叠目标漏警和虚是一个亟需解决的课题。
技术实现思路
1、本发明主要针对侧扫声纳图像目标检测时,难以顾及不同尺度目标的检测精度,提出一种名为bes-yolov8的海底目标检测模型。该模型在yolov8模型的基础上引入双向特征金字塔结构(bifpn)、多尺度注意力模块(ema)以及形状-交并比损失函数(shape-iou)构成,在yolov8的backbone中引入ema注意力机制,融合不同尺度的信息,获得更清晰的多尺度特征,在neck部分使用bifpn结构进行特征融合,以便更全面地表征不同大小的目标,提高多尺度目标的检测性能,最后采用shape_iou损失函数评估目标检测模型的性能、不断优化目标检测模型以提高其精,三者结合能有效提升侧扫声纳图像多尺度目标的检测精度及效率,提出的算法可应用于auv等水下平台实施海底目标的智能检测。
2、为了达到上述目的,本发明的技术方案为:
3、一种基于bes-yolov8模型的海底目标检测方法,具体包括以下步骤:
4、第一步,数据集预处理
5、在图像预处理过程中,对低分辨率图像进行最邻近插值,并将插值所得的图像利用haar小波进行离散小波变换,使原图完全转化为其低频系数,且不存在任何信息损失,即低频部分包含原始低分辨率图像的所有信息;接着对原图进行双三次插值后进行haar小波分解,提取其三个方向上的高频系数;在完成对低频成分与三个叠加高频成分的整合后,利用小波逆变换重建出高分辨率图像;
6、第二步,构建bes-yolov8模型并训练
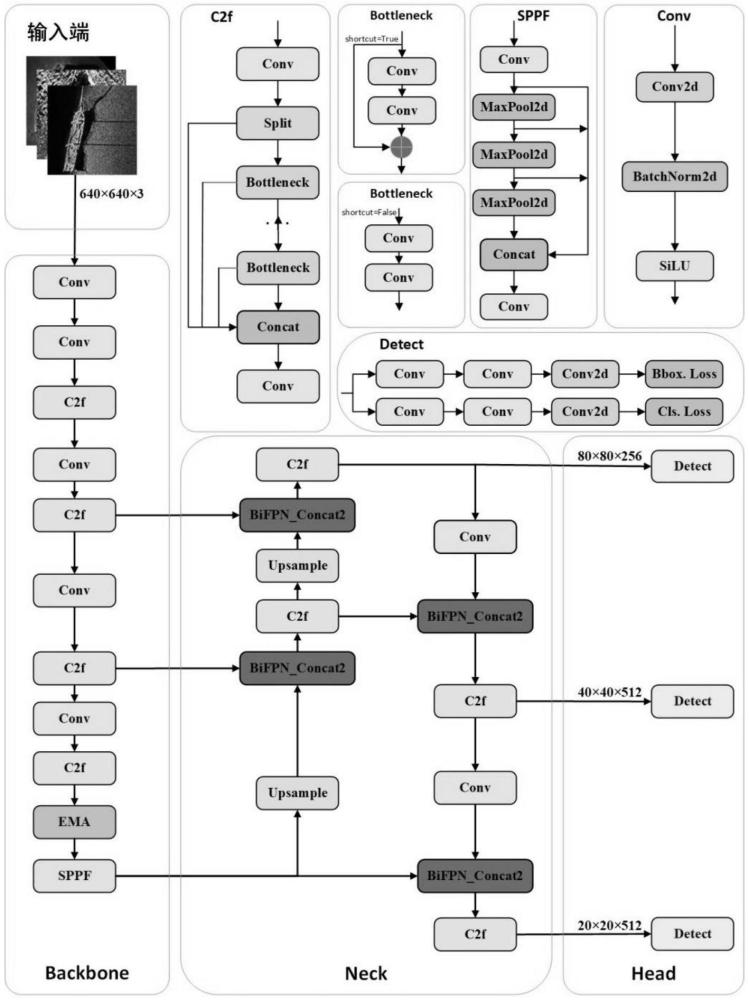
7、bes-yolov8模型包括输入端、backbone、neck和head四部分;
8、在输入端,输入的图像首先会被缩放到固定的尺寸,接下来,图像的像素值会被归一化到0到1之间的范围,再将图像的通道顺序转换为bgr,最后,图像的维度会被调整为网络所需的格式;
9、backbone用于提取目标的通用特征,包含5个conv模块、4个c2f模块、1个sppf模块、1个ema模块;conv模块为卷积层,c2f模块为csplayer_2conv模块,用于减少计算量并增加梯度流;c2f模块由多个bottleneck块组成,每个bottleneck块都包含两个卷积层;这些卷积层对输入特征图进行变换,提取出更高级别的特征表示;bes-yolov8模型,在主干网络的倒数第二层引入ema模块,用于增强模型对不同尺度信息的感知能力,捕获跨维度交互并建立维度之间的依赖关系,使神经元的局部感受野能高效获得更清晰的多尺度特征,降低图像中干扰因素的影响;backbone的最后一层为sppf模块,sppf模块通过一系列连续的5×5卷积核最大池化操作,分别捕捉感受野大小为5、9和13的信息;
10、neck用于进一步丰富特征的多样性以达到提升模型鲁棒性的目的,设置于backbone和head之间,包含4个c2f,2个conv,2个upsample和4个bifpn_concat2;从backbone中经过sppf处理的特征层与未经处理的特征层采用bifpn结构进行融合,用以综合不同尺度的特征信息;neck部分分别将4层和14层、6层和11层、13层和17层、10层和20层的特征图经过4个bifpn_concat2模块进行融合,实现多尺度信息的融合;
11、head为目标检测模型的决策部分,负责产生最终的检测结果;采用原始yolov8模型的解耦头结构,将分类和检测头分离,解耦头结构先分叉开两个conv卷积模块,然后经过一个conv2d,最后分别算出classifcation loss和bbox loss;在head部分的三个解耦头分别对应着neck部分的三个尺度的特征图输出,以便能对不同尺度的目标进行检测;
12、最后引入shape_iou损失函数,用于准确地评估目标检测模型的性能、优化目标检测模型;
13、第三步,模型预测
14、通过将验证集放入训练好的模型中,进行检测,获得图像中的目标信息,同时通过精确率p、召回率r、平均精度均值指标进行评估模型性能。
15、本发明的有益效果为:本发明提供的一种基于bes-yolov8模型的海底目标检测方法,融合了双向特征金字塔结构、多尺度注意力模块以及形状-交并比损失函数,有效提取侧扫声纳图像中的多尺度特征,并更好地融合多尺度信息,有助于模型更全面地理解不同大小的目标,提高了对多尺度物体的检测性能,同时也增强了对物体的上下文理解,有效提升侧扫声纳图像目标检测的精度,在进行探测时,可用于对海底目标的实时智能探测,具有实际应用价值。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314318.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表