基于视点移动速度的视认距离确定方法
- 国知局
- 2024-10-21 15:01:02
本发明涉及视认距离,特别涉及基于视点移动速度的视认距离确定方法。
背景技术:
1、在隧道行车过程中,一般分为接近段、入口段、中间段、以及出口段,在接近段与入口段过程,存在驾驶员视野中亮环境主导逐渐过渡到暗环境主导的暗适应,而导致隧道入口的黑洞效应。其中,通过增加隧道入口加强段的照明,降低隧道内外的亮度差对缓解黑洞效应起到关键的作用。
2、在关于隧道入口暗适应安全的研究中,学者最早通过模拟进入隧道入口视认实验研究人眼反应时间。在眼球捕捉技术日渐成熟后,学者多通过驾驶员的瞳孔面积、瞳孔面积变化率、注视时间、眨眼及眼动轨迹等生理眼动指标,直接研究驾驶员驾驶负荷,适应程度等。
3、在cie88-1990《隧道和地下通道照明指南》中,提出建议将停车视距作为判定隧道安全照明的依据,主要通过对摆放于隧道入口的障碍物进行视认,对比该速度下的停车视距与识别障碍物的视认距离的关系确定安全性。此处将识别障碍物的距离定义为视认距离,区别于驾驶行为中的视认距离。对于具有信息的标志牌,存在着由发现到识别信息到视认完成的过程,但在对于隧道光环境的视认实验中,并不存在信息识别的过程,研究侧重点在于驾驶员是否能在实验既定的光环境中对路面的不良状况进行认知,具体方式为对比发现障碍物的距离与停车视距的关系,视认障碍物以最不利情况考虑,取反射系数为20%的20*20*20cm的灰色立方体,故在此障碍物的视认距离等同于标志牌最初发现的距离。
4、针对视认距离实验法,我国学者做了大量的实车研究,研究方法多为利用非接触速度检测仪,当驾驶员发现目标物后立刻告知车上实验员,实验员对非接触速度仪打点做标记,并在车辆驶过目标物时再次打点,通过计算可得出驾驶员在不同速度、亮度条件下的视认距离。但是这其中存在着驾驶员从初始视认到最终确认障碍物体的时间滞后,以及告知后随车实验人员操作的滞后,导致所获得视认距离会比驾驶员实际的视认距离偏小。
5、另外,有学者利用眼动仪的aoi(area of interesting)功能模块进行分析,处理中,逐帧导入视频图像,并根据图中小目标物体的大小,手动划定眼动信息捕捉区域,小目标物位于捕捉区域内中心处,软件将对该区域内的信息及数据进行分析和统计,如注视点进入区域内的首次时间、出现次数及持续时间的统计等。但是利用图像处理的技术处理视点分布的区域,存在着无法在录制图像中看清楚小目标物位置的问题,从而无法进行标定小目标物的范围,同时通过aoi功能需要手动划定障碍物位置,无法对小目标物进行动态的跟随,而且车辆在实际行驶过程中的震荡同样限制了aoi区域的准确性。
技术实现思路
1、为解决上述现有技术中所存在的获得视认距离不准确以及眼动仪的aoi区域不准确的问题,本发明提供基于视点移动速度的视认距离确定方法,能够有效准确地获得视认距离及眼动仪的aoi区域。
2、为实现上述技术目的,本发明提供如下技术方案:
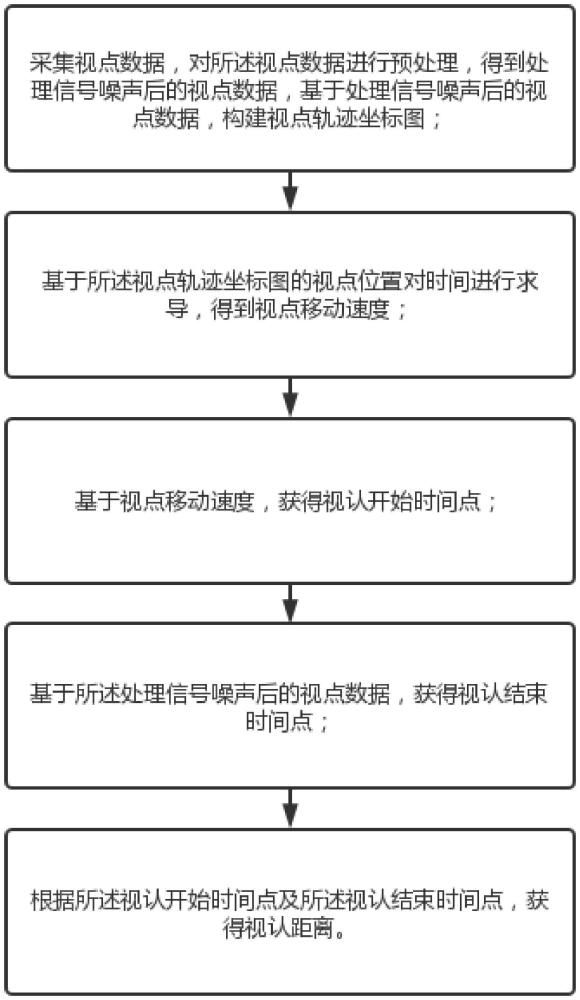
3、基于视点移动速度的视认距离确定方法,具体包括:采集视点数据,对所述视点数据进行预处理,得到处理信号噪声后的视点数据,基于处理信号噪声后的视点数据,构建视点轨迹坐标图;基于所述视点轨迹坐标图的视点位置对时间进行求导,得到视点移动速度;基于视点移动速度,获得视认开始时间点;基于所述处理信号噪声后的视点数据,获得视认结束时间点;根据所述视认开始时间点及所述视认结束时间点,获得视认距离。
4、在一些实施方式中,采集视点数据的过程包括:通过眼动仪两个红外瞳孔摄像头采集左右眼的瞳孔大小与眼球位置;通过眼动仪前置的场景摄像头采集驾驶员前视视野的视频。
5、在一些实施方式中,对所述视点数据进行预处理的过程为:对所述视点数据进行小波分解处理,得到处理信号噪声后的视点数据。
6、在一些实施方式中,构建视点轨迹坐标图的过程为:以处理后的所述视频中图像视点像素横纵坐标轴及行车距离为三轴,以所述前视视野的视频左下角为坐标的原点,构建视点轨迹坐标图。
7、在一些实施方式中,获得视点移动速度过程包括:将所述视点轨迹坐标图的视点位置对时间进行求导,得到视点速度向量;基于视点速度向量,获得视点移动速度。
8、在一些实施方式中,获得视认开始时间点的过程包括:对视点移动速度进行阈值判断,其中,若视点移动速度小于移动阈值且视点移动速度小于移动阈值的持续时间大于时间阈值时,则确定进行注视行为,所述注视行为的持续时间大于注视阈值时,将所述注视行为的开始时间作为视认开始时间点。
9、在一些实施方式中,获得视认结束时间点的过程包括:对所述驾驶员前视视野的视频进行特征识别,得到障碍物经过车头的时间,将所述障碍物经过车头的时间作为视认结束时间点。
10、在一些实施方式中,获得视认距离的过程为:对所述视认开始时间点及所述视认结束时间点进行差值计算,获得驾驶员从开始视认至经过障碍物的时间差;对所述时间差及速度进行乘积计算,获得视认距离。
11、本发明实施例具有如下技术效果:
12、本发明实施例基于驾驶员不同眼动行为的区别,通过视点坐标的速度变化获得视认开始时间点;通过眼动仪前置摄像头视频获得视认结束时间点;对两时间点进行差值计算,获得从发现障碍物到经过障碍物的时间差,对时间差及车辆匀速行驶的速度进行乘积计算,获得视认距离。该方法改进了利用眼动仪进行自然驾驶行车实验中驾驶员视认距离的方式,充分利用了眼动仪的视点采集技术,能够准确获取眼动仪的aoi区域,同时能够准确地获取视认距离,为研究自然驾驶实验中驾驶员的视认行为提供了新的研究方法,具有可靠的成功率。
技术特征:1.基于视点移动速度的视认距离确定方法,其特征在于,包括:
2.根据权利要求1所述基于视点移动速度的视认距离确定方法,其特征在于:采集视点数据的过程包括:通过眼动仪两个红外瞳孔摄像头采集左右眼的瞳孔大小与眼球位置;通过眼动仪前置的场景摄像头采集驾驶员前视视野的视频。
3.根据权利要求2所述基于视点移动速度的视认距离确定方法,其特征在于:对所述视点数据进行预处理的过程为:对所述视点数据进行小波分解处理,得到处理信号噪声后的视点数据。
4.根据权利要求3所述基于视点移动速度的视认距离确定方法,其特征在于:构建视点轨迹坐标图的过程为:以处理后的所述视频中图像视点像素横纵坐标轴及行车距离为三轴,以所述前视视野的视频左下角为坐标的原点,构建视点轨迹坐标图。
5.根据权利要求1所述基于视点移动速度的视认距离确定方法,其特征在于:获得视点移动速度过程包括:将所述视点轨迹坐标图的视点位置对时间进行求导,得到视点速度向量;基于视点速度向量,获得视点移动速度。
6.根据权利要求1所述基于视点移动速度的视认距离确定方法,其特征在于:获得视认开始时间点的过程包括:对视点移动速度进行阈值判断,其中,若视点移动速度小于移动阈值且视点移动速度小于移动阈值的持续时间大于时间阈值时,则确定进行注视行为,所述注视行为的持续时间大于注视阈值时,将所述注视行为的开始时间作为视认开始时间点。
7.根据权利要求3所述基于视点移动速度的视认距离确定方法,其特征在于:获得视认结束时间点的过程包括:对所述驾驶员前视视野的视频进行特征识别,得到障碍物经过车头的时间,将所述障碍物经过车头的时间作为视认结束时间点。
8.根据权利要求1所述基于视点移动速度的视认距离确定方法,其特征在于:获得视认距离的过程为:对所述视认开始时间点及所述视认结束时间点进行差值计算,获得驾驶员从开始视认至经过障碍物的时间差;对所述时间差及速度进行乘积计算,获得视认距离。
技术总结本发明公开了基于视点移动速度的视认距离确定方法,采集视点数据,对所述视点数据进行预处理,得到处理信号噪声后的视点数据,基于处理信号噪声后的视点数据,获得视点轨迹坐标图;基于所述视点轨迹坐标图的视点位置对时间进行求导,得到视点移动速度;基于视点移动速度,获得视认开始时间点;基于所述处理信号噪声后的视点数据,获得视认结束时间点;根据所述视认开始时间点及所述视认结束时间点,获得视认距离。本发明改进了利用眼动仪进行自然驾驶行车实验中驾驶员视认距离的方式,充分利用了眼动仪的视点采集技术,为研究自然驾驶实验中驾驶员的视认行为提供了新的研究方法,具有较为可靠的成功率。技术研发人员:宋灿灿,郭忠印,梁家豪受保护的技术使用者:上海师范大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/320179.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表