一种基于组合优化算法的航空发动机身份证模型自动快速修正方法
- 国知局
- 2024-10-21 15:06:51
1.本发明属于航空发动机仿真与建模领域,具体涉及一种基于组合优化算法的航空发动机身份证模型自动快速修正方法。
背景技术:
0、2.背景技术
1、高精度的航空发动机部件级模型对于发动机结构设计、控制算法设计和性能故障诊断至关重要,特别是部件特性图对于模型精度有很大的影响。然而由于以下原因难以获得高精度的特性图:(a)特性图数据需要通过严格的台架试车获得,但考虑到其巨大的成本而难以为所有发动机提供试车数据。(b)大部分特性图是由单部件试验建立的,但整个发动机的部件特性与单部件特性之间存在差异。(c)发动机随着长时间的运行会发生性能退化,使得与原本的特性图不再匹配。这些限制使人们开始研究能表征个体发动机特性的方法。最初,研究人员们聚焦于模型的机理分析方面,通过有经验的工作人员对特征参数进行人工校正;后来,一种常用的方法是通过修正部件的流量和总压恢复系数来修正特性图,此外,还能将特征曲线表示为不同形式的数学函数,对函数校正来达到修正特性图的目的。
2、随着发动机的类型和数量不断增加,很难再依靠人工校正来完成修模任务。非线性的求解方法应运而成:试车数据通常用于扩展平衡方程的维度,而平衡方程可以通过特征修正因子的非线性方法求解。权函数法是校正特征图的常用方法之一,修正后模型的最大误差小于2%。为了减少算法的计算时间,通常会将试车数据直接输入模型,参与气路部件的计算。此外,一些复杂的算法通过使用传感器来评估发动机处于稳定工作状态时的特性。卡尔曼滤波算法(kf)因为不需要构建模型的共同工作方程而被广泛应用于求解特性修正因子。stamatis等人提出了一种基于试车数据的发动机部件特性修正方法,通过发动机模型的残差向量和待校正参数的误差构建成本函数。
3、非线性方程的求解会受到传感器数量的限制,使得在工程中应用此方法仍存在挑战。因此优化算法逐渐被应用于模型修正。基于优化算法的方法通常将模型输出误差作为适应度函数的一部分,将特性修正因子作为粒子寻优。最初,遗传算法和粒子群优化算法因不易陷入局部最优而受到青睐。
4、上述方法均存在自身的优点和局限性,机理分析的方法需要根据经验来操作,但随着发动机数量的增加,使人力无法胜任。而使用非线性求解方法时,传感器数量不足会导致无穷解的产生。
5、3.技术实现要素:
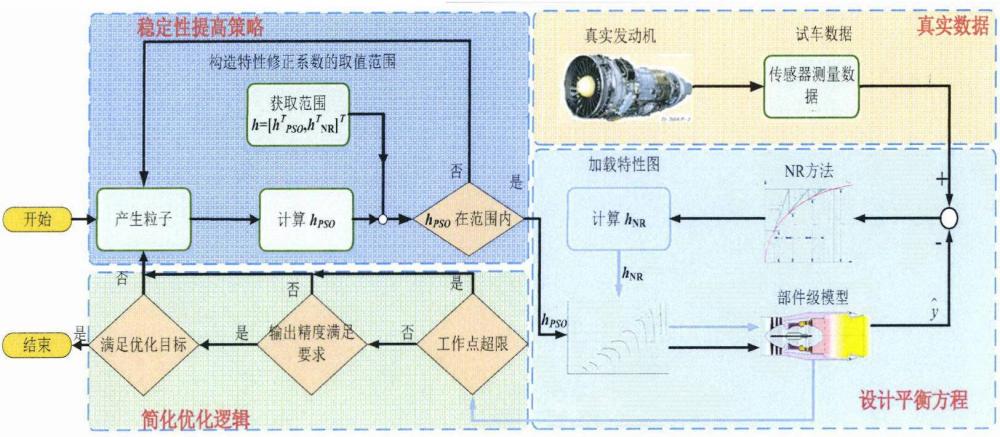
6、针对上述技术问题,本发明提供了一种基于组合优化算法的航空发动机身份证模型自动快速修正方法,以涡扇发动机为研究对象,设计了nr-pso算法,解决了当仅采用粒子群算法对模型修正时,模型的输出精度主要依赖于目标函数设计的问题,在pso算法的基础上引入nr方法,减少了寻优粒子的数量,并设计简化的优化逻辑,剔除低质量粒子从而提高了优化速度。该方法能适用于不同的传感器组合,使平均发动机模型能成功地转换为身份证模型,提高了模型修正的成功率。
7、技术方案:为实现上述目的,本发明采用的技术方案为:
8、一种基于组合优化算法的航空发动机身份证模型自动快速修正方法,其特征在于,包括以下步骤:
9、步骤a)首先采用粒子群优化算法随机初始化粒子的位置和速度。
10、步骤b)由nr算法得到hnr,利用特性校正因子函数生成hpso。
11、步骤c)利用hpso和hnr修正初始的特性图,修正后的特性图用于更新模型的输出。
12、步骤d)将修正后模型输出的数据与真实试车数据构成算法的适应度函数。
13、步骤e)根据全局最优位置和局部最优位置更新粒子,直到满足优化目标。
14、进一步的,所述步骤a)中采用粒子群优化算法随机初始化粒子的位置和速度具体步骤如下:
15、步骤a1)给出粒子的ct形式如下:
16、ct=[p1,p2,…p48]t
17、其中p表示ct的参数,是校正因子函数的因子。
18、第t个粒子的速度为:
19、vt=[vt1,vt2,…yt48]t
20、进一步的,所述步骤b)中由nr算法得到hnr,利用特性校正因子函数生成hpso具体步骤如下:
21、步骤b1)特性修正系数h的定义为:
22、
23、其中,xi*为未经特性图校正的压比、效率或流量值,xi为修正后的值。每个hi对应的物理意义如表1所示。
24、特性修正系数向量h包含两个元素hnr是由nr方法求解的参数,hpso是由pso方法得到的参数。采用的nr算法计算公式为:
25、
26、其中,xg表示函数f的自变量。
27、由于传感器不完备,应引入优化方法降低平衡方程的维数,并采用nr方法保证修正后模型有高精度的输出。但hpso中的参数不应只是简单的降维得到,在确定hpso的组成之前,必须首先确定hnr的组成。如表1所示,hnr应被选为能从传感器信息中获得的h的最大子集。
28、表1.特性修正系数
29、
30、步骤b2)为了保证能够确定发动机的状态,需要进一步选择合理的元素,使pso算法计算出的hpso有且仅有一个解。因此需要对hnr和平衡方程进行分析。根据四种不同的实际试车情况选择了四种不同的传感器组合,如表2所示,被选择的传感器用圆圈标记,被选择的传感器的数量用ny表示。
31、表1.用于发动机模型校正的各种传感器测量组合
32、
33、以y1为例说明hnr和平衡方程的选择,正常情况下,双轴涡扇发动机的平衡方程如下:
34、
35、
36、
37、
38、
39、
40、其中n、ps和wg分别表示功率、静压和校正后的质量气体流量。上述六组方程需要求解的初猜值都包含在xg=[nl,nh,πf,πc,πht,πlt]t中,πf、πc、πht和πlt分别表示风扇、压气机、高压涡轮和低压涡轮的压比。为了能用nr方法求解hnr,需要在xg中补充hnr的一些元素,但会使得平衡方程的数量少于xg中元素的个数,因此需要仔细分析xg,hnr和平衡方程。
41、首先,分析h的变化的影响,以的平均变化值作为评价标准,定义为:
42、
43、其中,i表示h的第i个参数,和分别表示随h变化和不随h变化的的第j个参数值。
44、其次,从平衡方程的结构考虑,nl、nh、πf、πc和πht×πlt都可以通过实际试车数据获得。如果πlt被确定,那么πht就能被唯一确定,因此xg中剩余的元素就是πlt。同时,就可以构造新的平衡方程。
45、
46、
47、
48、其中,f2表示通过特性图插值得到效率的函数;s和h分别表示熵和焓;下标out和in表示部件的进出口;fs2h表示由熵计算得到焓的函数;t22和t3分别是试车数据中风扇和压气机的出口温度。新的平衡方程能够求解8个元素,所以hnr应该由7个元素组成,这意味着的h剩余参数还需要去除一个。
49、最后,对于不同的传感器组合y,选择不同的xg元素和平衡方程,y1-y4对应的选择如表3所示。必须选择xg保证平衡方程有唯一解,否则修正后的特性图不能代表一台真实发动机的实际工作状态。
50、表3.不同xg对应的平衡方程和元素选择
51、
52、
53、步骤b3)当hnr确定后,由特性校正因子函数得到hpso,定义校正因子函数为:
54、
55、其中,ai,bi,ci和di为校正因子函数的系数。
56、步骤c)利用hpso和hnr修正初始的特性图,修正后的特性图用于更新模型的输出具体步骤如下:
57、步骤c1)在修正特性图,在nr-pso算法开始时,用不同ncor下的hi,ncor的商来确定h的取值范围。特性图上不同特征线之间相对位置的变化可以用hi,ncor1和hi,ncor2之间的商来表示。假设ncor2大于ncor1的情况下,商的定义如下:
58、
59、可以通过预先编写的程序获得qi,ncor,该程序在模型修正算法开始前自动计算。由初始特性图导出的qi,ncor表示特性线的初始相对位置。
60、步骤c2)优化过程中,所有qi,ncor组成特征校正因子的限制范围。在优化过程中,只需要将当前粒子计算出的qi,ncor与极限范围比较,无需人为干预,将特性图合理性问题转化为相对位置变化问题,提高了优化过程的稳定性。
61、步骤d)将修正后模型输出的数据与真实试车数据构成算法的适应度函数具体步骤如下:
62、步骤d1)定义适应度函数fe用于表示所有试车数据与模型输出之间的误差,其表达式为:
63、
64、步骤d2)设计惩罚函数用于提高优化算法的成功概率
65、
66、
67、其中,fa(ek,ij)为惩罚函数,k代表不同试车数据yk,m表示不同ncor对应的试车数据。
68、步骤d3)在优化算法运行的过程中,加入简化的优化逻辑,使粒子尽快收敛到高质量粒子,并立即结束低质量粒子的运行过程。通过对低质量粒子分配不同的适应度值,可以将粒子引导至高质量粒子,以满足精度要求,从而减少仿真消耗时间,提高算法稳定性。
69、步骤e)根据全局最优位置和局部最优位置更新粒子,直到满足优化目标具体步骤如下:
70、步骤e1)根据第d维下第t个粒子更新自身速度和位置的方程为:
71、
72、其中,ptd是个体已知最优解;pgd为总体已知最优解;w为惯性权重;c1,c2为加速度常数,均为0.4;r1,r2是[0,1]中的随机数。
73、步骤e2)根据全局和局部最优粒子得到新粒子之后,继续优化,直到自适应函数保持30步不变,或者达到最大搜索步数则停止运算。
74、有益效果:本发明提供的一种基于组合优化算法的航空发动机身份证模型自动快速修正方法,采用以上技术方案与现有技术相比,具有以下技术效果:
75、(1)模型修正成功率较高。当仅用pso算法对模型进行修正时,模型输出的精度主要依赖于目标函数的设计。然而本方法通过引入nr算法保证了修正后模型输出的精度。
76、(2)减少了优化耗时。引入nr算法以减少优化粒子的数量,同时,设计新的优化逻辑,剔除低质量粒子,提高优化的速度。
77、(3)适用于不同的传感器组合。对于不同的可用传感器组合,采用不同的平衡方程,使平均发动机模型能成功地转换为身份证模型。
技术实现思路
本文地址:https://www.jishuxx.com/zhuanli/20241021/320571.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。