一种井下巷道粉尘监测喷雾装置的制作方法
- 国知局
- 2024-10-21 15:23:43
本发明涉及环境监测,尤其涉及一种井下巷道粉尘监测喷雾装置。
背景技术:
1、在煤矿的生产作业过程中,如机采、综采、炮采、回采、锚喷、装运、选煤等工序,均会产生大量的粉尘。随着大功率采掘机械及综采放顶煤开采工艺的广泛采用,煤尘产生量大幅度增加,煤尘浓度也随之升高。工人长期在高煤尘浓度的环境中作业,吸入呼吸性煤尘可引起尘肺,严重危害煤矿工人的身体健康。因此,有效控制煤矿粉尘浓度,保障工人健康,成为煤矿安全生产的重要任务。
2、现有技术中的防尘措施,如洒水降尘、湿式作业等,虽然在一定程度上能够降低粉尘浓度,但效果并不理想。特别是对于大功率采掘机械作业产生的呼吸性粉尘,传统方法难以有效控制。此外,传统防尘措施往往依赖人工操作,难以实现自动化和智能化管理,因此提出一种井下巷道粉尘监测喷雾装置。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的防尘措施,如洒水降尘、湿式作业等,虽然在一定程度上能够降低粉尘浓度,但效果并不理想。特别是对于大功率采掘机械作业产生的呼吸性粉尘,传统方法难以有效控制。此外,传统防尘措施往往依赖人工操作,难以实现自动化和智能化管理的缺点,而提出的一种井下巷道粉尘监测喷雾装置。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种井下巷道粉尘监测喷雾装置,包括:
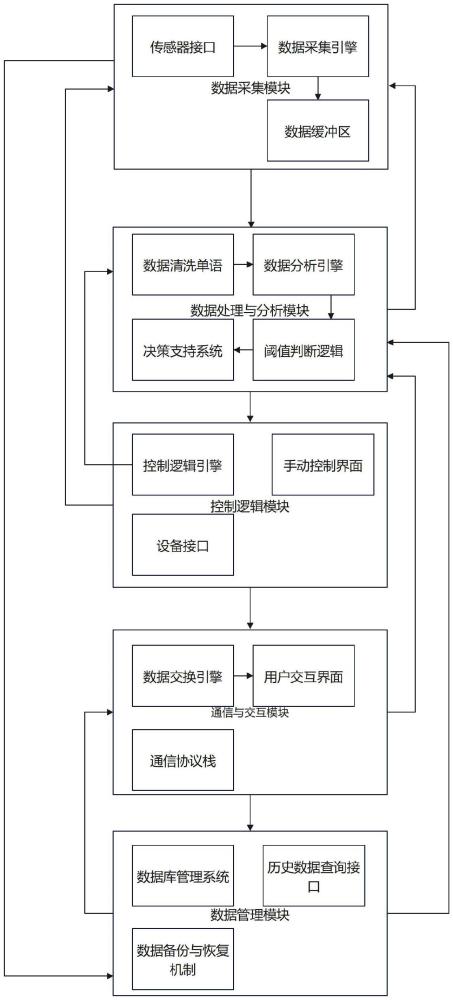
4、数据采集模块,用于从配置于井下巷道的粉尘监测传感器实时接收环境数据,包括但不限于粉尘浓度、温度、湿度等参数;
5、数据处理与分析模块,配置有数据处理引擎,用于对接收到的数据进行清洗、整合及标准化处理,并集成有数据分析算法,用于实时监测粉尘浓度是否超过预设阈值,以及进行趋势预测和异常检测;
6、控制逻辑模块,根据数据处理与分析模块的结果生成控制指令,当粉尘浓度超过预设阈值时,自动触发喷雾系统的启动指令,并支持手动控制功能以应对特殊情况;
7、通信与交互模块,实现软件系统与硬件设备之间的通信,包括粉尘监测传感器、喷雾系统等,并提供用户交互界面,用于显示监测数据、设置参数、查看历史记录等;
8、数据管理模块,用于存储历史监测数据,支持数据查询、导出及备份与恢复功能,确保数据安全与可追溯性。
9、上述技术方案进一步包括:
10、优选的,所述数据采集模块,组成部分:传感器接口、数据采集引擎、数据缓存区。功能描述:该模块负责从井下巷道安装的多种传感器实时采集环境数据,包括但不限于粉尘浓度、温度、湿度等关键参数。传感器接口确保与不同类型传感器的兼容通信;数据采集引擎负责数据的实时读取与初步处理;数据缓存区则用于临时存储待处理的数据,以应对可能的网络延迟或处理高峰。
11、优选的,所述数据处理与分析模块包括,数据清洗单元,数据分析引擎,阈值判断逻辑,决策支持系统;所述数据清洗单元负责数据预处理工作;所述数据分析引擎则运用算法对数据进行深入分析,识别粉尘浓度的变化趋势与异常;所述阈值判断逻辑则根据预设的安全阈值,判断当前粉尘浓度是否超标,并据此生成相应的控制信号,所述决策支持系统利用数据处理与分析模块提供的信息,结合预设的规则和策略,为用户提供决策建议。
12、优选的,所述智能控制模块包括,控制逻辑引擎,设备接口,手动控制界面;所述控制逻辑引擎负责生成具体的控制指令;所述设备接口用于确保指令能够准确传达至喷雾系统;所述手动控制界面则提供给操作人员一个界面,允许其在特殊情况下进行手动干预。
13、优选的,所述通信与交互模块包括,通信协议栈,数据交换引擎,用户交互界面;所述通信协议栈支持多种通信协议,用于不同设备的兼容通信;所述数据交换引擎负责数据的编解码与传输;所述用户交互界面则提供一个界面,用于展示交互界面,支持参数设置与调整。
14、优选的,所述数据管理与存储模块包括,数据库管理系统,数据备份与恢复机制,历史数据查询接口;所述数据库管理系统负责数据的结构化存储与索引;所述数据备份与恢复机制确保数据的安全性与可恢复性;所述历史数据查询接口则提供给用户一个途径,用于查询与导出历史数据,数据分析与决策支持。
15、优选的,所述数据分析引擎包括,实时监测单元,趋势预测单元,异常检测单元;所述实时监测单元负责实时接收来自数据源的粉尘浓度数据,将接收到的数据与预设的阈值进行比较,如果超出阈值,则立即触发警报或采取措施,所述趋势预测单元利用历史数据和时间序列分析方法来预测未来的粉尘浓度,所述异常检测单元识别与正常行为显著不同的粉尘浓度数据点,一旦检测到异常,可以触发警报或通知相关人员进行进一步调查。
16、优选的,所述实时监测单元阈值比较的过程:
17、进一步的,设置ct是时间t的巷道粉尘浓度测量值;
18、进一步的,动态阈值为tt,可随时间或环境条件变化而调整;
19、进一步的,实时检测的判断逻辑可以表示为:其中,tt可根据历史数据分析或实时环境参数动态调整。
20、优选的,所述趋势预测单元趋势预测的具体步骤为:
21、进一步的,加权移动平均:设置n是移动平均的窗口大小;
22、进一步的,ct,ct-1,…,ct-n+1是最近n个时间点的粉尘浓度测量值;
23、进一步的,加权系数w1,w2,…,wn分别对应于每个测量值的权重;
24、进一步的,预测值可以通过以下公式计算:
25、进一步的,通过进行初步预测快速提供对下一时间点的初步估计;
26、进一步的,差分自回归移动平均模型:设置ct是时间t的实际粉尘浓度测量值;
27、进一步的,差分自回归移动平均模型表示为:arima(p,d,q),其中p是自回归项的阶数,d是差分阶数,q是移动平均项的阶数;
28、进一步的,差分操作表示为:其中b是滞后算子,是差分算子;
29、进一步的,自回归部分表示为:φ(b)=1-φ1b-φ2b2-…-φpbp,其中φ1,φ2,…,φp是自回归系数;
30、进一步的,移动平均部分表示为:θ(b)=1+θ1b+θ2b2+…+θqbq,其中θ1,θ2,…,θq是移动平均系数;
31、进一步的,差分自回归移动平均模型的预测公式为:其中εt是白噪声项代表了模型预测中的随机误差,是模型预测的下一时间点的粉尘浓度;
32、进一步的,如果趋势预测单元预测粉尘浓度将在未来一段时间内持续上升,可提前启动喷雾装置,以预防可能的粉尘浓度超标。
33、优选的,所述异常检测单元使用基于自组织映射网络算法进行异常检测的步骤为:
34、进一步的,s1初始化:假设c是一个n×m的矩阵,表示n个时间点的m维特征向量;初始化m个神经元元胞的权重wi为随机值,其中i=1,2,…,m;
35、进一步的,s2数据输入:对于每个时间点t,输入特征向量ct;
36、进一步的,s3竞争学习:计算每个神经元元胞的权重wi与输入特征向量ct的距离dit:找到距离最小的神经元元胞wwinner即获胜元胞;
37、进一步的,s4权重更新:更新获胜元胞的权重wwinner向输入特征向量ct靠拢:wwinner=wwinner+η·(ct-wwinner),其中η是学习率,用于控制权重更新的速度;
38、进一步的,s5重复步骤s2-s4:直到达到预定迭代次数或收敛条件;
39、进一步的,s6异常检测:使用更新后的权重wwinner进行异常检测,计算新测量向量ct与获胜元胞的权重wwinner之间的距离dt:判断dt是否超过预设的阈值dtresold,从而确定ct是否为异常值,其中ct1,ct2,...ctm是ct的特征值,wwinner1,wwinner2,...,wwinnerm是获胜元胞的权重值,如果ct为异常值,触发警报,指示可能存在粉尘浓度的异常变化。
40、优选的,所述通信与交互模块具备数据加密与压缩功能,以减少数据传输过程中的安全风险与带宽占用。
41、优选的,所述智能控制模块集成有粉尘控制设备,该设备与智能控制系统实现无缝对接。
42、优选的,采用高精度粉尘浓度传感器包括但不限于视频粉尘浓度传感器,利用光散射原理直接测量总粉尘浓度,确保测量数据快速准确、灵敏度高、性能稳定。
43、本发明具备以下有益效果:
44、1、本发明中,采用自组织映射网络(som)算法进行异常检测,能够有效地发现井下巷道粉尘浓度的异常变化,及时发现潜在的安全隐患,并采取相应的措施,保障井下作业的安全。通过som算法,系统能够自动识别数据中的正常模式,并能够检测到与这些模式显著不同的数据点。这有助于系统及时发现粉尘浓度的异常变化,并采取相应的措施,以防止粉尘浓度过高导致的危害。
45、2、本发明中,利用arima模型进行趋势预测,能够根据历史数据和实时监测数据,预测未来一段时间内粉尘浓度的变化趋势,为喷雾系统的控制提供准确的参考。arima模型能够捕捉到数据中的长期趋势、季节性和周期性,提供更加准确的未来预测。这有助于提高喷雾系统的效率和粉尘控制的效果,降低粉尘浓度对工作人员健康的影响,保障井下作业的安全。
本文地址:https://www.jishuxx.com/zhuanli/20241021/321415.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表