一种基于安全评价模型的自动驾驶测评方法及装置与流程
- 国知局
- 2024-10-21 15:25:31
本发明涉及自动驾驶,具体而言,涉及一种基于安全评价模型的自动驾驶测评方法及装置。
背景技术:
1、在自动驾驶技术目前正处于从研发测试转向产业化应用的关键阶段,因其面临系统和应用场景复杂、人工智能黑箱难题等挑战,传统的测试方法无法应对其测试验证需求。
2、联合国世界车辆法规协调论坛(wp.29)研究提出的“多支柱”测试评估方法,现已获得国际社会广泛认可,其中安全模型可以在需要避免碰撞的情况以及无法避免但需要缓解碰撞的情况设置安全阈值,对于自动驾驶在关键危险场景下的测试评估至关重要。“自动驾驶安全模型”是一种定义明确的、指标定量的、规则可解释的数学模型,可用于定义涉及自动驾驶安全相关的安全距离、路权归属、交通规则、风险评估、性能边界等内容,以支持综合采用模拟仿真测试、封闭场地测试等方法,开展智能网联汽车产品安全测评工作。当前,自动驾驶安全评价模型存在质量参差不齐、场景覆盖度不足、构建标准不统一等问题,尤其是缺乏应用于自动驾驶安全测评的统一方法框架。
技术实现思路
1、本发明提供一种基于安全评价模型的自动驾驶测评方法及装置,用以克服现有技术中存在的至少一个技术问题。
2、根据本发明实施例的第一方面,提供一种基于安全评价模型的自动驾驶测评方法,包括:
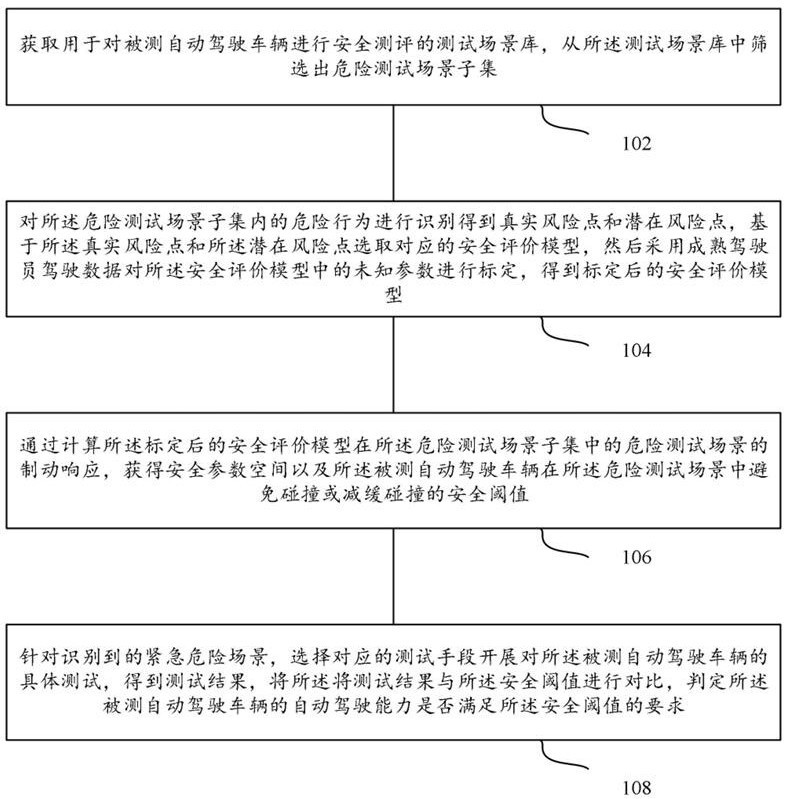
3、获取用于对被测自动驾驶车辆进行安全测评的测试场景库,从所述测试场景库中筛选出危险测试场景子集;
4、对所述危险测试场景子集内的危险行为进行识别得到真实风险点和潜在风险点,基于所述真实风险点和所述潜在风险点选取对应的安全评价模型,然后采用成熟驾驶员驾驶数据对所述安全评价模型中的未知参数进行标定,得到标定后的安全评价模型;
5、通过计算所述标定后的安全评价模型在所述危险测试场景子集中的危险测试场景的制动响应,获得安全参数空间以及所述被测自动驾驶车辆在所述危险测试场景中避免碰撞或减缓碰撞的安全阈值;
6、针对识别到的所述危险测试场景子集,选择对应的测试手段开展对所述被测自动驾驶车辆的具体测试,得到测试结果,将所述测试结果与所述安全阈值进行对比,以判定所述被测自动驾驶车辆的自动驾驶能力是否满足所述安全阈值的要求。
7、优选的,所述获取用于对被测自动驾驶车辆进行安全测评的测试场景库具体包括:根据对所述被测自动驾驶车辆的功能及设计运行条件,梳理对所述被测自动驾驶车辆与目标物的典型行为组合,确定场景参数空间,并对所述行为组合和所述参数空间进行合理性分析后,从预先建立的基准测试场景库中筛选得到所述测试场景库。
8、优选的,所述对所述危险测试场景子集内的危险行为进行识别得到真实风险点和潜在风险点之前包括:分析测试场景集覆盖度,具体包括功能场景类别、逻辑场景类别和具体场景参数覆盖度三个方面:
9、1)功能场景类别覆盖度:遍历主车行为、目标物行为及其他附属信息,并剔除不合理的功能场景,获得合理的功能场景全集,涉及的功能场景类别数为cf;筛选得到的功能场景类别数为cf,则功能场景类别的覆盖度定义为:
10、;
11、2)逻辑场景类别覆盖度:针对每一类功能场景,遍历主车和目标物位置关系,确定每一类功能场景下的逻辑场景类别,并剔除不合理的逻辑场景,获得合理的逻辑场景全集,涉及的逻辑场景类别数为cl;筛选得到的逻辑场景类别数为cl,则逻辑场景类别的覆盖度定义为:
12、;
13、3)具体场景参数覆盖度:针对每一类逻辑场景,分析出其合理可预见的参数空间[p1, p2, p3, …, pn],其中p1、p2、p3、…、pn为所有场景参数p1、p2、p3、…、pn的参数范围;筛选得到的具体场景的参数空间[p1, p2, p3, …, pn],其中p1、p2、p3、…、pn为所有场景参数p1、p2、p3、…、pn的参数范围,如不涉及则设置为0;则具体场景参数覆盖度定义为:
14、;
15、综合考虑三个维度的影响,并赋予每个维度不同的加权,得到测试场景集的覆盖度为:
16、;
17、其中,符号表示数值大于0的第一加权系数,符号表示数值大于0的第二加权系数,符号表示数值大于0的第三加权系数,且++=1。
18、优选的,所述对所述危险测试场景子集内的危险行为进行识别得到真实风险点和潜在风险点具体包括:
19、根据是否具备考虑预防性操作能力将自动驾驶安全模型分为冲突避免模型和事故避免模型,根据标准操作动作将所述事故避免模型分为紧急制动模型和紧急转向模型;
20、首先,基于是否为有预兆的冲突判断,将所述危险测试场景子集内的场景分为有预兆冲突场景和无预兆冲突场景;
21、针对所述无预兆冲突场景,选择事故避免模型,并基于目标物可能的行为意图,识别潜在风险,判断风险出现的时间点;如果风险出现在低速情况下,则选取紧急制动模型;如果风险出现在高速情况下,且有足够的横向避让空间,则选取紧急转向模型,否则选择所述紧急制动模型;
22、针对所述有预兆冲突场景,选取所述冲突避免模型,并基于出现的潜在风险,判断风险出现的时间点。
23、根据本发明实施例的第二方面,提供一种基于安全评价模型的自动驾驶测评装置,包括:
24、危险测试场景子集获取模块,用于获取用于对被测自动驾驶车辆进行安全测评的测试场景库,从所述测试场景库中筛选出危险测试场景子集;
25、安全评价模型标定模块,用于对所述危险测试场景子集内的危险行为进行识别得到真实风险点和潜在风险点,基于所述真实风险点和所述潜在风险点选取对应的安全评价模型,然后采用成熟驾驶员驾驶数据对所述安全评价模型中的未知参数进行标定,得到标定后的安全评价模型;
26、参数获取模块,用于通过计算所述标定后的安全评价模型在所述危险测试场景子集中的危险测试场景的制动响应,获得安全参数空间以及所述被测自动驾驶车辆在所述危险测试场景中避免碰撞或减缓碰撞的安全阈值;
27、安全验证模块,用于针对识别到的所述危险测试场景子集,选择对应的测试手段开展对所述被测自动驾驶车辆的具体测试,得到测试结果,将所述测试结果与所述安全阈值进行对比,判定所述被测自动驾驶车辆的自动驾驶能力是否满足所述安全阈值的要求。
28、本说明书一个实施例至少能够达到以下有益效果:本技术技术方案提出一种基于关键危险场景,以安全评价模型为通过准则的服务于自动驾驶安全测评的方法。通过计算标定后的安全评价模型在危险测试场景子集中的危险测试场景的制动响应,获得被测自动驾驶车辆的安全参数空间以及被测自动驾驶车辆在危险测试场景中避免碰撞或减缓碰撞的安全阈值,针对识别到的危险测试场景子集,选择对应的测试手段开展对被测自动驾驶车辆的具体测试,得到测试结果,将将测试结果与安全阈值进行对比,以判定被测自动驾驶车辆的自动驾驶能力是否满足安全阈值的要求。同时,本技术技术方案从功能场景类别、逻辑场景类别和具体场景参数这三个维度来分析测试场景集覆盖度,这些不同的维度对于被测自动驾驶车辆进行安全测评都发挥着重要作用,有利于发现潜在的问题,保证测试的全面性,发现测试用例的盲点和不足之处。
本文地址:https://www.jishuxx.com/zhuanli/20241021/321497.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表