一种基于ChArUco标定板的线扫位姿标定系统及方法
- 国知局
- 2024-11-18 18:14:44
本发明属于计算机视觉,尤其涉及一种基于charuco标定板的线扫位姿标定系统及方法。
背景技术:
1、随着深度学习以及计算机视觉技术不断向着数字化、智能化、便捷化的方向发展,非接触式三维测重成为工业制造的关键,广泛的应用于数字化城市的重建、大型器械的损伤检测、古迹的保护与修复、零件缺陷检测与外形重建等领域。实现三维测量过程中最关键的一步就是视觉的标定技术,相机(扫描仪)标定的精度以及内参矩阵、外参矩阵、畸变系数、光平面矩阵的确定直接影响到成像的质量。近年来,伴随着技术的不断发展,先进的线激光扫描仪逐渐取代传统工业相机的地位。线激光扫描仪能直接获取物体表面的三维形状信息、实现高精度测量、不受光照条件的限制、具有较大的测量范围、采用非接触式的测量方法、同时也具有自动化扫描和处理数据的能力,综上所述,线激光扫描仪相比传统工业相机具有更多的优势。
2、目前,对于线激光扫描仪的标定方法主要是采用张氏“棋盘格”标定法,标定板采用棋盘格标定板或halcon(7*7)圆标定板,摆置多个不同姿态的标定板,在开激光器和关闭激光器的情况下分别拍摄多组标定板图片,对关闭激光器的情况下拍摄的多张图片提取角点,并且计算相机的内外参,对开激光器的情况下拍摄的多张图片提取激光线像素坐标,利用上步骤计算得到的相机内外参,求解光平面矩阵。但张氏“棋盘格”标定法对标定板的质量要求较高,且仅限于单平面的标定,不适用于非常大尺寸的标定板,可能需要结合其他的标定方法或采取特殊的措施来克服这些劣势。
3、申请公布号为cn114162169a的发明专利《惯性及激光扫描仪联合在线标定方法》,制作并获取标准轨道模型的标准廓形,然后将轨检梁放置在两自由度摇摆台上,调整其至水平状态。对惯性导航系统进行初始对准,同步采集激光器廓形信息和惯导姿态信息。将各个激光扫描仪输出的廓形调整至与标准廓形接近重合,完成惯性导航系统和激光扫描仪的标定粗调。最后,进行标定精调。虽然相较于传统的位姿标定方法提升了检测的精度,但操作十分复杂且难度较大,对场景的适用性较低,适合于特定场景的扫描仪标定。
4、申请公布号为cn112659112a的发明专利《一种基于线激光扫描仪的机器人手眼标定方法》,利用机器人一侧的标准球球心作为标定点,在控制机器人动作的同时,使线激光扫描仪以不同姿态获取该标定点在其坐标系下的位置坐标。然后,采用非线性优化法解算目标函数,获得线激光扫描仪与机器人末端执行器之间位置关系的手眼标定矩阵。这种标定方法有效的避免了线激光扫描仪标定时激光平面必须直接经过标定点的难题,但该种扫描仪的标定方法仅限于单平面,不适合全场景进行标定,且通过非线性优化(最小二乘法)对于测量数据中存在的噪声进行消除,无法较好的解决实验数据误差。
5、因此,如何简单有效的对线激光扫描仪进行位姿标定,标定精度较高、系统制作成本较低、操作难度较小、且适用于全方位多场景,是现阶段亟需解决的关键问题。
技术实现思路
1、本发明的目的在于提出一种基于charuco标定板的线扫位姿标定系统及方法,线激光扫描仪安装在可旋转的三脚架云台上,在云台平面一周每隔120度固定放置一块charuco标定板,设置云台转轴每次旋转的固定角度为6度,转轴共转动360度,转动60次,在每一次转动为一组,拍摄多组不同位姿的标定板图像。在完成一次完整的转动后,选择其中一组确定标定板上不同位置的多组关键角点,并结合refinenet神经网络对charuco标定板的关键角点进行定位以及角点坐标进行修订,并结合pnp(perspective-n-point)算法以及先激光扫描仪相关参数解算出线激光扫描仪所在坐标系与世界坐标系之间的位姿关系。其余组别同样按照上述方法进行结算位姿关系,最终对上述所有组别解算出的位姿关系进行优化,可以得到最准确的位姿,完成整体的线激光扫描仪位姿标定过程。
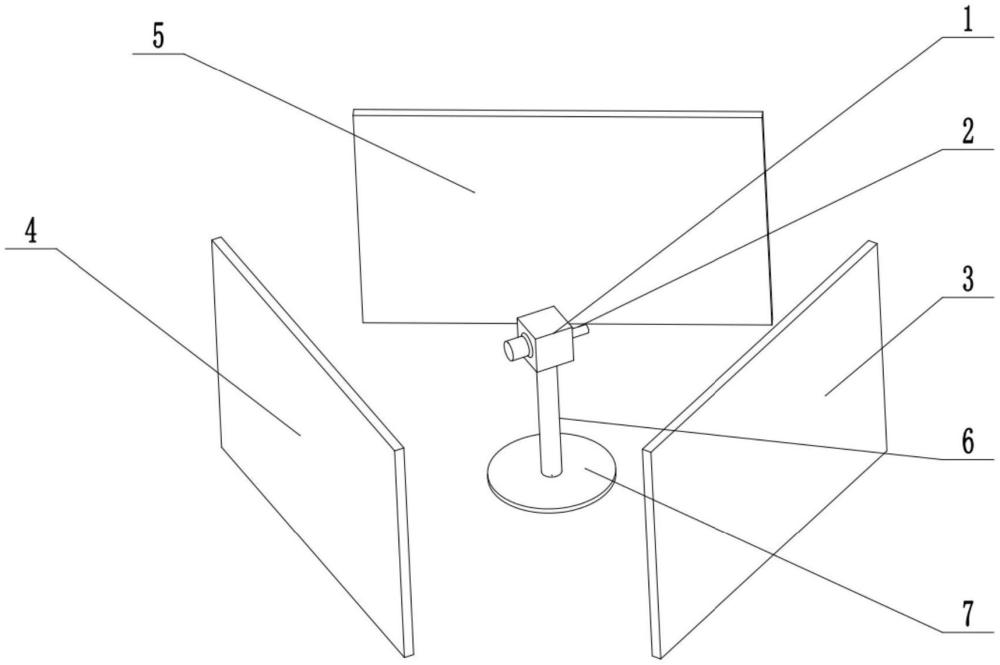
2、为实现上述目的,本发明提供了一种基于charuco标定板的线扫位姿标定系统,包括:线激光扫描仪、连接装置、若干charuco标定板、伸缩装置、可旋转支撑装置;
3、所述伸缩装置固定在所述可旋转支撑装置上,所述线激光扫描仪固定在所述伸缩装置的另一端;
4、所述charuco标定板以所述可旋转支撑装置为中心,两两之间成预设角度均匀分布;
5、所述线激光扫描仪,通过所述可旋转支撑装置的旋转,采集charuco标定板的图像数据,并将所述图像数据通过所述连接装置上传至上位机,进行位姿标。
6、可选地,所述charuco标定板包括:第一charuco标定板、第二charuco标定板、第三charuco标定板;
7、所述第一charuco标定板对应所述可旋转支撑装置的120度固定安装;所述第二charuco标定板对应所述可旋转支撑装置的240度固定安装;所述第三charuco标定板对应所述可旋转支撑装置的360度固定安装。
8、可选地,所述charuco标定板基于棋盘格标定板以及aruco标定板融合构成。
9、本发明还提出了一种基于charuco标定板的线扫位姿标定方法,所述方法包括:
10、获取线激光扫描仪的内参数据;
11、采集charuco标定板的图像数据;
12、利用refinenet网络,对所述图像数据进行关键角点进行定位;
13、基于定位后的图像数据,结合pnp算法以及线激光扫描仪的内参数据,获取线激光扫描仪所在坐标系与世界坐标系之间的若干组位姿数值,并利用若干组位姿数值进行迭代优化,获取最终的位姿数值。
14、可选地,选取棋盘格以及aruco标定板角点作为所述图像数据发关键角点。
15、可选地,获取线激光扫描仪的内参数据包括:
16、将所述线激光扫描仪的世界坐标系转换为相机坐标系;
17、将所述相机坐标系转换为图像坐标系;
18、将所述图像坐标系转换为像素坐标系;
19、结合所述相机坐标系、图像坐标系和像素坐标系计算所述内参数据。
20、可选地,利用refinenet网络,对所述图像数据进行关键角点进行定位包括:
21、对采集到的charuco标定板的图像数据集进行关键角点的标注;
22、基于标注关键角点的图像数据集对refinenet网络进行训练;
23、利用训练后的refinenet网络,对所述图像数据进行关键角点定位以及角点坐标的修订。
24、可选地,所述refinenet网络中,由4个refinenet单元构成4级级联结构,利用多层次特征提取以及长距离残差连接生成高分辨率预测结果。
25、可选地,所述组位姿数值为:
26、
27、其中,r表示旋转矩阵,t表示平移矩阵,fab表示标定得到的结果参数,a=1、2、3,b=1、2、3、4。
28、本发明具有以下有益效果:
29、本发明可以实现全方位采集不同角度的多组charuco标定板图像数据信息,且受外界环境干扰较小。通过refinenet神经网络对charuco标定板的关键角点进行定位以及角点坐标进行修订,并结合pnp算法以及线激光扫描仪相关参数解算线激光扫描仪所在坐标系与世界坐标系之间的位姿关系,通过多组数据与的不断迭代优化,最终可以得到最准确的位姿,完成整体的线激光扫描仪位姿标定过程。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327782.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表