盲区避撞方法、装置、车辆及存储介质与流程
- 国知局
- 2024-11-18 18:27:29
本技术涉及车辆,特别涉及一种盲区避撞方法、装置、车辆及存储介质。
背景技术:
1、汽车制造商和技术公司一直在不断改进自动紧急制动系统,尤其是在处理盲区遮挡方面,盲区遮挡是指驾驶员视线受限或完全看不见的区域,如何应对盲区突然出现的车辆,行人,二轮车等目标对于aeb系统来说是一个挑战,因为有效的自动制动依赖于系统能够准确检测到潜在的碰撞威胁,而且日常场景需要降低误触发的概率。
2、相关技术中通过获取实时感知数据,获取前向目标选择模型,其中,所述前向目标选择模型是通过集成学习方法训练获得;利用所述前向目标选择模型和所述实时感知数据确定实时前向目标。然而,相关技术难以对车辆盲区进行障碍物检测,难以预防潜在的碰撞。
技术实现思路
1、本技术提供一种盲区避撞方法、装置、车辆及存储介质,以解决相关技术难以对车辆盲区进行障碍物检测,预防潜在的碰撞的问题,可以设置盲区缓冲区,有效识别盲区的障碍物,并进行避撞操作,提高车辆的行驶安全性。
2、本技术第一方面实施例提供一种盲区避撞方法,包括以下步骤:
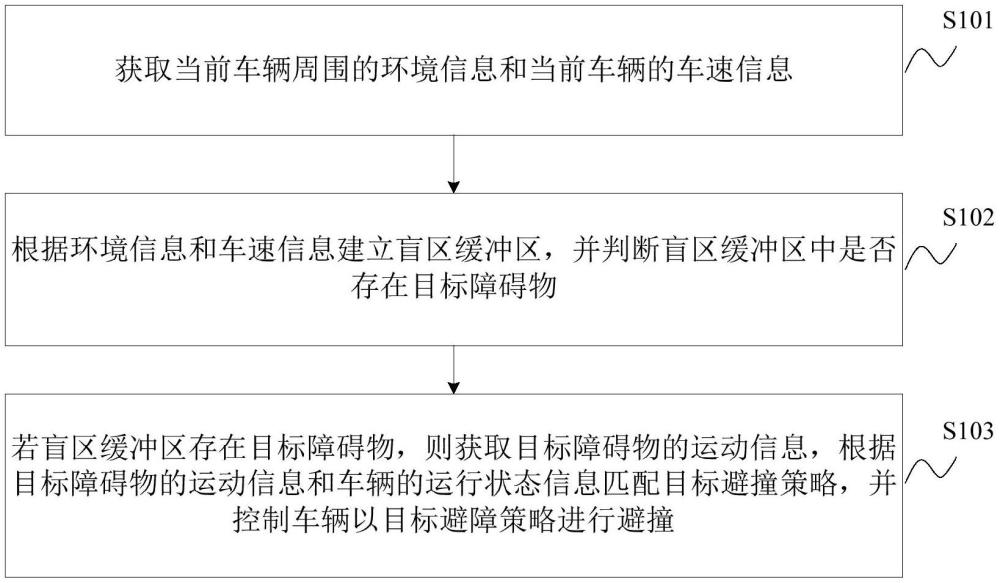
3、获取当前车辆周围的环境信息和所述当前车辆的车速信息;
4、根据所述环境信息和所述车速信息建立盲区缓冲区,并判断所述盲区缓冲区中是否存在目标障碍物;以及
5、若所述盲区缓冲区存在所述目标障碍物,则获取所述目标障碍物的运动信息,根据所述目标障碍物的运动信息和所述车辆的运行状态信息匹配目标避撞策略,并控制所述车辆以所述目标避障策略进行避撞。
6、可选地,在一些实施例中,所述判断所述盲区缓冲区中是否存在目标障碍物,包括:
7、接收所述盲区缓冲区对应的至少一个感知设备发送的所述盲区缓冲区的第一感知信息,并获取所述当前车辆采集的所述盲区缓冲区的第二感知信息;
8、基于所述第一感知信息和所述第二感知信息,判断所述盲区缓冲区是否存在满足第一预设条件的可移动障碍物,或者所述盲区缓冲区是否存在第二预设条件的固定障碍物;
9、若所述盲区缓冲区存在所述可移动障碍物,或者所述盲区缓冲区是否存在所述固定障碍物,则判定所述缓冲区中存在所述目标障碍物。
10、可选地,在一些实施例中,所述判断所述盲区缓冲区中是否存在目标障碍物,包括,还包括:
11、判断是否接收到所述盲区缓冲区对应的至少一个感知设备发送的障碍物提醒信息;
12、若接收到所述障碍物提醒信息,则判定所述缓冲区中存在所述目标障碍物。
13、可选地,在一些实施例中,所述根据所述环境信息和所述车速信息建立盲区缓冲区,包括:
14、若根据所述车速信息确定所述当前车辆的车速处于第一速度区间,则根据所述第一速度区间确定第一盲区面积,并根据所述第一盲区面积和所述环境信息建立所述盲区缓冲区;
15、若根据所述车速信息确定所述当前车辆的车速处于第二速度区间,则根据所述第二速度区间确定第二盲区面积,并根据所述第二盲区面积和所述环境信息建立所述盲区缓冲区,其中,所述第二速度区间的下限值大于所述第一速度区间的上限值,所述第二盲区面积大于所述第一盲区面积;
16、若根据所述车速信息确定所述当前车辆的车速处于第三速度区间,则根据所述第三速度区间确定第三盲区面积,并根据所述第三盲区面积和所述环境信息建立所述盲区缓冲区,其中,所述第三速度区间的下限值大于所述第二速度区间的上限值,所述第三盲区面积大于所述第二盲区面积。
17、可选地,在一些实施例中,在控制所述车辆以所述目标避障策略进行避撞时,还包括:
18、根据所述目标障碍物的运动信息和所述车辆的运行状态信息生成避撞提醒指令,并基于所述避撞提醒指令进行提醒。
19、本技术第二方面实施例提供一种盲区避撞装置,包括:
20、获取模块,用于获取当前车辆周围的环境信息和所述当前车辆的车速信息;
21、建立模块,用于根据所述环境信息和所述车速信息建立盲区缓冲区,并判断所述盲区缓冲区中是否存在目标障碍物;以及
22、避撞模块,用于在所述盲区缓冲区存在所述目标障碍物的情况小,获取所述目标障碍物的运动信息,根据所述目标障碍物的运动信息和所述车辆的运行状态信息匹配目标避撞策略,并控制所述车辆以所述目标避障策略进行避撞。
23、可选地,在一些实施例中,所述建立模块,包括:
24、接收单元,用于接收所述盲区缓冲区对应的至少一个感知设备发送的所述盲区缓冲区的第一感知信息,并获取所述当前车辆采集的所述盲区缓冲区的第二感知信息;
25、第一判断单元,用于基于所述第一感知信息和所述第二感知信息,判断所述盲区缓冲区是否存在满足第一预设条件的可移动障碍物,或者所述盲区缓冲区是否存在第二预设条件的固定障碍物;
26、第一判定单元,用于在所述盲区缓冲区存在所述可移动障碍物,或者所述盲区缓冲区是否存在所述固定障碍物的情况下,判定所述缓冲区中存在所述目标障碍物。
27、可选地,在一些实施例中,所述建立模块,包括,还包括:
28、第二判断单元,用于判断是否接收到所述盲区缓冲区对应的至少一个感知设备发送的障碍物提醒信息;
29、第二判定单元,用于在接收到所述障碍物提醒信息的情况下,判定所述缓冲区中存在所述目标障碍物。
30、可选地,在一些实施例中,所述建立模块,包括:
31、第一建立单元,用于在根据所述车速信息确定所述当前车辆的车速处于第一速度区间时,根据所述第一速度区间确定第一盲区面积,并根据所述第一盲区面积和所述环境信息建立所述盲区缓冲区;
32、第二建立单元,用于根据所述车速信息确定所述当前车辆的车速处于第二速度区间,则根据所述第二速度区间确定第二盲区面积,并根据所述第二盲区面积和所述环境信息建立所述盲区缓冲区,其中,所述第二速度区间的下限值大于所述第一速度区间的上限值,所述第二盲区面积大于所述第一盲区面积;
33、第三建立单元,用于根据所述车速信息确定所述当前车辆的车速处于第三速度区间,则根据所述第三速度区间确定第三盲区面积,并根据所述第三盲区面积和所述环境信息建立所述盲区缓冲区,其中,所述第三速度区间的下限值大于所述第二速度区间的上限值,所述第三盲区面积大于所述第二盲区面积。
34、可选地,在一些实施例中,在控制所述车辆以所述目标避障策略进行避撞时,还包括:
35、提醒单元,用于根据所述目标障碍物的运动信息和所述车辆的运行状态信息生成避撞提醒指令,并基于所述避撞提醒指令进行提醒。
36、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的盲区避撞方法。
37、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的盲区避撞方法。
38、由此,通过获取当前车辆周围的环境信息和当前车辆的车速信息,并根据环境信息和车速信息建立盲区缓冲区,并判断盲区缓冲区中是否存在目标障碍物,并在盲区缓冲区存在目标障碍物时,获取目标障碍物的运动信息,根据目标障碍物的运动信息和车辆的运行状态信息匹配目标避撞策略,并控制车辆以目标避障策略进行避撞。由此,解决相关技术难以对车辆盲区进行障碍物检测,预防潜在的碰撞的问题,可以设置盲区缓冲区,有效识别盲区的障碍物,并进行避撞操作,提高车辆的行驶安全性。
39、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328810.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表