基于仪表着陆系统引导的无人机进近校验飞行方法和系统与流程
- 国知局
- 2024-11-19 09:37:20
本发明属于飞行校验领域,涉及一种基于仪表着陆系统引导的无人机进近校验飞行方法和系统。
背景技术:
1、飞行校验是指为保证飞行安全,使用装有专门校验设备的飞行校验飞机,按照飞行校验的有关规范,检查和评估各种导航、雷达、通信等设备的空间信号的质量及其容限,以及机场的进、离港飞行程序,并依据检查和评估的结果出具飞行校验报告的过程。
2、仪表着陆系统(instrument landing system)又叫盲降系统,是应用最为广泛的飞机精密进近和着陆引导系统。它的作用是由地面发射的两束无线电信号实现航向道和下滑道指引,建立一条由跑道指向空中的虚拟路径,飞机通过机载接收设备,确定自身与该路径的相对位置,使飞机沿正确方向飞向跑道并且平稳下降高度,最终实现安全着陆。仪表着陆系统由用于水平引导的航向台、用于垂直引导的下滑台以及用于进近位置提示的指点标台或测距仪台组成。
3、采用无人机进行的无人机飞行校验系统依赖于传统的无人机航点式飞行控制方法,该方法通过在起飞前或者飞行中设计一系列的航路坐标点,使得无人机依次通过航线上的航路坐标点来完成无人机的进近导航。
4、对于仪表着陆的进近飞行科目,要求无人机实时追踪空中实际的仪表着陆系统引导信号进行进近飞行,校验系统只有采集到真实的校验信号才能对仪表着陆系统的各项校验参数进行准确的计算,反应实际的信号质量。然而,现有的无人机飞控平台由于没有仪表着陆系统导航源,故其飞行方法只能通过卫星定位或者惯导定位的航路点方式进行进近引导,从而无法对仪表着陆系统进行科学的校验评估。
技术实现思路
1、为了解决上述的技术问题,根据本发明的第一方面,本发明提出了一种基于仪表着陆系统引导的无人机进近飞行方法,在利用无人机进行基于仪表着陆系统的进近科目飞行校验时,包括如下步骤:
2、无人机按照航路点方式飞行至进近起始点,进入航向信号追踪模式,无人机通过机载导航接收机从所述仪表着陆系统得到航向信号,使其追踪航向道进行进近飞行;
3、无人机飞行至最终进近点时,进入下滑信号追踪模式,无人机通过机载导航接收机从所述仪表着陆系统得到下滑信号,使其追踪下滑道进行进近飞行。
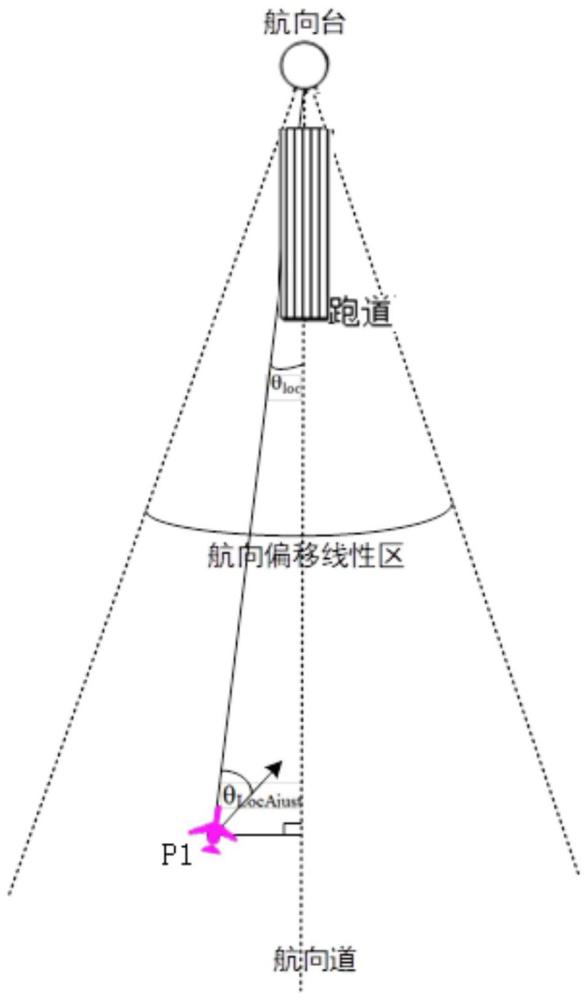
4、在优选实施例中,无人机得到航向偏移值对当前航向进行修正,使得无人机在水平投影面上沿理论航向与当前位置到航向道的垂线的夹角平分线进近,无人机相对于理论航向的航向角修正量θlocajust为:
5、
6、其中,d1为跑道长度,
7、d2为航向天线到跑道终端的距离,
8、d为航向道在跑道入口处单侧的宽度,
9、ddmlocdev为无人机在当前位置处的以调制度差表示的航向偏移值,
10、ddmlmax为所述航道宽度的左右区域边界位置的调制度差。
11、在优选实施例中,无人机得到的下滑偏移值对无人机的航迹倾角进行修正,使得无人机在垂直投影面上沿理论下滑道与当前位置p2到下滑道的垂线的夹角平分线进近,无人机相对于理论下滑角的航迹倾角修正量θgsajust为如前所述的公式7的限定:
12、θgsajust=(90-(gw*abs(ddmgsdev/(2*ddmgmax))))/2,
13、其中,gw为下滑道宽度,
14、abs()为取绝对值,
15、ddmgsdev为无人机在当前位置处的以调制度差表示的下滑偏移值,
16、ddmgmax为所述下滑宽度的上下区域边界位置的调制度差。
17、在优选实施例中,对于采用90hz导航调制信号和150hz导航调制信号的飞行引导系统中,ddmlmax=0.155,ddmgmax=0.175。
18、在优选实施例中,下滑角为3.00°,gw=0.72°,d=105m。
19、在优选实施例中,航向偏移值ddmlocdev仅在正负ddmlmax之间呈线性变化,对于超出正负ddmlmax范围的航向偏移值ddmlocdev,按ddmlocdev取极值ddmlmax的情况进行计算,
20、下滑偏移值ddmgsdev仅在正负ddmgmax之间呈线性变化,对于超出正负ddmgmax范围的下滑偏移值,按ddmgsdev取极值ddmgmax的情况进行计算。
21、在优选实施例中,所述无人机进近校验飞行方法用于校验航向平均宽度,无人机进行左右偏置飞行,
22、对于左偏置飞行,无人机在水平投影面上追踪调制度差为-ddmlmax/2的航向偏移信号,垂直投影面上追踪调制度差为0的下滑偏移信号;对于右偏置飞行,无人机在水平投影面上追踪调制度差为+ddmlmax/2的航向偏移信号,垂直投影面上追踪调制度差为0的下滑偏移信号。
23、在优选实施例中,所述无人机进近校验飞行方法用于校验下滑平均宽度,无人机进行上下偏置飞行,
24、对于上偏置飞行,无人机在水平投影面上追踪调制度差为0的航向偏移信号,垂直投影面上追踪调制度差为+ddmgmax/2的下滑偏移信号;对于下偏置飞行,无人机在水平投影面上追踪调制度差为0的航向偏移信号,垂直投影面上追踪调制度差为-ddmgmax/2的下滑偏移信号。
25、在优选实施例中,在航向信号追踪模式下,无人机进近过程的关键航路点包括最终进近点、跑道入口点和跑道出口点。
26、根据本发明的第一方面,本发明提出了一种基于仪表着陆系统引导的无人机进近飞行系统,执行如上所述的基于仪表着陆系统引导的无人机进近校验飞行方法。
27、本发明实施例的基于仪表着陆系统引导的无人机进近飞行方法和系统的优点在于:本发明实施例利用无人机校验系统上的机载仪表着陆导航接收机给出的航向和下滑偏移信号,将其接入无人机平台的自动驾驶系统,通过对航向偏移信号的计算得到无人机的航向修正角度,通过对下滑偏移信号的计算得到无人机的航迹倾角修正量,并将航向修正角和航迹倾角修正量引入无人机飞行控制系统,从而实现无人机追踪仪表着陆系统引导信号的进近飞行。
技术特征:1.一种基于仪表着陆系统引导的无人机进近校验飞行方法,其特征在于,在利用无人机进行基于仪表着陆系统的进近科目飞行校验时,包括如下步骤:
2.如权利要求1所述的无人机进近校验飞行方法,其特征在于,无人机得到航向偏移值对当前航向进行修正,使得无人机在水平投影面上沿理论航向与当前位置到航向道的垂线的夹角平分线进近,无人机相对于理论航向的航向角修正量θlocajust为:
3.如权利要求1或2所述的无人机进近校验飞行方法,其特征在于,无人机得到的下滑偏移值对无人机的航迹倾角进行修正,使得无人机在垂直投影面上沿理论下滑道与当前位置p2到下滑道的垂线的夹角平分线进近,无人机相对于理论下滑角的航迹倾角修正量θgsajust为如前所述的公式7的限定:
4.如权利要求3所述的无人机进近校验飞行方法,其特征在于,对于采用90hz导航调制信号和150hz导航调制信号的飞行引导系统中,ddmlmax=0.155,ddmgmax=0.175。
5.如权利要求4所述的无人机进近校验飞行方法,其特征在于,下滑角为3.00°,gw=0.72°,d=105m。
6.如权利要求3所述的无人机进近校验飞行方法,其特征在于,航向偏移值ddmlocdev仅在正负ddmlmax之间呈线性变化,对于超出正负ddmlmax范围的航向偏移值ddmlocdev,按ddmlocdev取极值ddmlmax的情况进行计算,
7.如权利要求3所述的无人机进近校验飞行方法,其特征在于,所述无人机进近校验飞行方法用于校验航向平均宽度,无人机进行左右偏置飞行,
8.如权利要求3所述的无人机进近校验飞行方法,其特征在于,所述无人机进近校验飞行方法用于校验下滑平均宽度,无人机进行上下偏置飞行,
9.如权利要求1所述的无人机进近校验飞行方法,其特征在于,在航向信号追踪模式下,无人机进近过程的关键航路点包括最终进近点、跑道入口点和跑道出口点。
10.一种基于仪表着陆系统引导的无人机进近校验飞行系统,其特征在于,所述无人机进近校验飞行系统执行如权利要求1-9之一所述的基于仪表着陆系统引导的无人机进近校验飞行方法。
技术总结本发明实施例涉及一种基于仪表着陆系统引导的无人机进近校验飞行方法和系统,利用无人机校验系统上的机载仪表着陆导航接收机给出的航向和下滑偏移信号,将其接入无人机平台的自动驾驶系统,通过对航向偏移信号的计算得到无人机的航向修正角度,通过对下滑偏移信号的计算得到无人机的航迹倾角修正量,并将航向修正角和航迹倾角修正量引入无人机飞行控制系统,从而实现无人机追踪仪表着陆系统引导信号的进近飞行。技术研发人员:李小强,荣毅受保护的技术使用者:北京天华航宇科技有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329529.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表