一种仿墨鱼吸盘原位环境吸力计量方法及系统
- 国知局
- 2024-11-19 09:48:53
本发明涉及海洋仿生,尤其涉及一种仿墨鱼吸盘原位环境吸力计量方法及系统。
背景技术:
1、墨鱼的吸盘具有强大的吸附能力和极好的环境适应性,其结构和功能是自然界高度优化的结果,仿墨鱼吸盘的研究旨在模仿这种自然生物现象,以开发出在工业、医学和其他应用领域中具有高效吸附能力和较强环境适应性的设备和材料。
2、随着对墨鱼吸盘不断深入的了解,人们对仿墨鱼吸盘的研究主要趋向两部分,一部分从仿墨鱼吸盘本身出发,在多尺度结构、柔性材料选择和弹性计算理论方面进行研究;另一部分则侧重于对仿墨鱼吸盘吸附力的有效测量及评价,以改善仿墨鱼吸盘的吸附性能。然而,在仿墨鱼吸盘吸力测量方面,还面临着如下挑战和问题:
3、1、目前仿墨鱼吸盘的吸力测量大多在实验室环境开展,而真正的墨鱼吸盘在海洋水环境中表现最佳,常规实验室平台难以模拟海洋原位环境条件,包括水压、水温和水质等;
4、2、在原位环境下测量仿墨鱼吸盘的吸力,需要克服海洋高压环境,而目前的微型传感器普遍不适用于海洋高压环境,这导致用电信号传感器在海洋原位环境测量仿墨鱼吸盘吸附力变得困难;
5、3、对仿墨鱼吸盘吸附力性能的测量,涉及机械结构,电气控制,图像识别等内容。在不同深度,不同海况的海洋原位环境下测量针对不同吸附材料的吸盘吸力,这对测量平台的稳定性、可重复性和耐久性提出了很高的要求,目前并没有相关的综合实验平台满足测量要求。
技术实现思路
1、本发明的目的是解决上述背景技术中提出的技术问题。
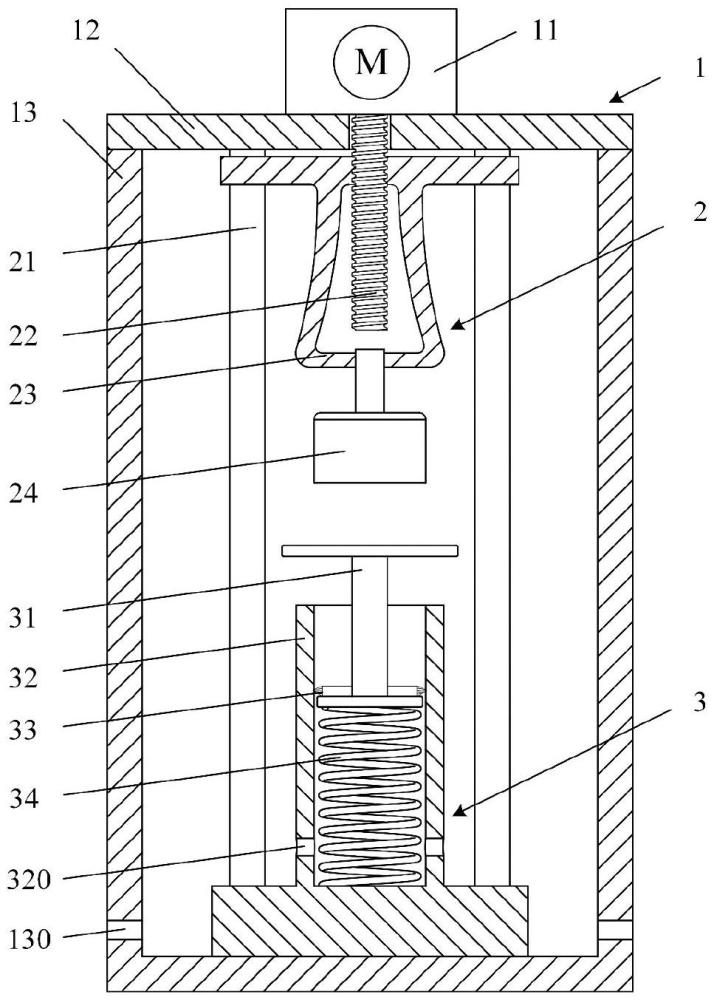
2、本发明采用如下技术方案:一种仿墨鱼吸盘原位环境吸力计量平台,包括支撑框架、垂直传动机构和弹簧测力装置,所述支撑框架内部与垂直传动机构连接并在水平方向对垂直传动机构进行限位,弹簧测力装置位于垂直传动机构正下方,并通过螺栓与支撑框架固定。
3、作为一种优选的技术方案,所述支撑框架包括深水耐压电机、盖板和壳体,所述深水耐压电机位于盖板中心,并与盖板通过螺栓固定,所述盖板和壳体为透明材料,其中,壳体上开有壳体透水孔。
4、作为一种优选的技术方案,所述垂直传动机构包括光轴、丝杆、弹性夹和吸盘,其中:
5、所述光轴有四根,分别穿过弹性夹,且一端与盖板连接,另一端与弹簧测力装置连接,四根光轴对弹性夹在水平方向进行限位,同时保证弹性夹沿竖直方向上下移动;
6、所述丝杆一端与深水耐压电机的轴连接,另一端穿过弹性夹中心的螺纹孔;
7、所述弹性夹分为滑动板部分和弹性夹持部分,滑动板部分中心有螺纹孔,四角有光孔,丝杆穿过螺纹孔,四根光轴分别穿过四个光孔;弹性夹持部分由左右两瓣组成,中间有圆形通孔,通过左右两瓣产生的形变力和圆形通孔的限位实现物体的夹持;
8、所述吸盘为柔性硅胶材料,上方的实心杆被弹性夹夹持固定,下方空腔部分悬空用于吸附物体。
9、作为一种优选的技术方案,所述弹簧测力装置包括“工”型吸板、刻度柱、刻度标识环和弹簧,其中:
10、所述刻度柱为中间空心的透明耐压材料,刻度柱外壁面刻有均匀刻度线,刻度柱底座与壳体通过螺栓固定连接,四角分别与四根光轴过盈配合,刻度柱壁面上开有刻度柱透水孔;
11、所述“工”型吸板为透明耐压材料,下面位于刻度柱的空腔内,与空腔内壁间隙配合,“工”型吸板下表面与弹簧连接,上表面可粘贴多种材料,用于测试吸盘对不同材料的吸附力大小;
12、所述刻度标识环为自润滑弹性材料,与刻度柱内壁面过渡配合,且位于“工”型吸板中间,“工”型吸板向上移动时,带动刻度柱同步移动;
13、所述弹簧位于刻度柱的空腔内,弹簧底部与刻度柱空腔底部固定连接,弹簧顶部与“工”型吸板下表面固定连接,弹簧在安装前通过力传感器进行标定。
14、本发明还提供了一种仿墨鱼吸盘原位环境吸力计量方法,包括以下步骤:
15、s1,去掉吸盘后,弹性夹与“工”型吸板可粘接,将吸力计量平台浸没水中,对拉力传感器不断施加向上拉力并记录刻度和读数,完成刻度柱的标定;
16、s2,吸力计量平台固定到中继器后,随中继器下放到海洋预定水位后,打开深水耐压电机,丝杆带动弹性夹和吸盘匀速垂直向下运动,位于支撑框架外部的摄像头实时观察吸盘的位置,位于支撑框架外部的照明灯为吸力计量平台提供照明;
17、s3,吸盘接触到“工”型吸板上表面后,在向上的弹簧力和弹性夹向下的压力下产生形变,并在吸盘空腔内形成负压;
18、s4,控制深水耐压电机反向转动,丝杆带动弹性夹和吸盘匀速垂直向上运动,由于吸盘对“工”型吸板上表面产生吸力,“工”型吸板随吸盘同时垂直向上运动,并带动刻度标识环向上运动,弹簧被向上拉升;
19、s5,弹簧被拉伸过程中,吸盘吸力与弹簧拉力达到临界平衡点,吸盘脱离“工”型吸板上表面,此时弹簧和“工”型吸板向下回复,刻度标识环由于与刻度柱内壁之间存在摩擦力,停留在所到达的最大刻度处,摄像头记录整个过程的刻度变化,完成仿墨鱼吸盘的吸力计量。
20、与现有技术相比,本发明的优点和积极效果在于:
21、1、本发明中,仿墨鱼吸盘原位环境吸力计量平台可在海洋原位环境下对仿墨鱼吸盘的吸附力进行直接测量,摄像头通过透明材料的支撑框架可实时观察到吸盘变形过程。
22、2、本发明中,测力装置摒弃不耐水下高压的电信号传感器,改用结构简单紧凑的弹簧测力结构,这极大地提高了吸力计量平台的稳定性、耐久性以及在复杂海况下的环境适应性。
23、3、本发明中,吸力计量平台里的被吸附表面可更换为不同材质,以获得更全面仿墨鱼吸盘在海洋原位环境中的吸附力数据。这使得吸力计量平台的可扩展性大大提高。
技术特征:1.一种仿墨鱼吸盘原位环境吸力计量平台,其特征在于,所述计量平台包括支撑框架(1)、垂直传动机构(2)和弹簧测力装置(3),所述支撑框架(1)内部与垂直传动机构(2)连接并在水平方向对垂直传动机构(2)进行限位,弹簧测力装置(3)位于垂直传动机构(2)正下方,并通过螺栓与支撑框架(1)固定。
2.根据权利要求1所述的仿墨鱼吸盘原位环境吸力计量平台,其特征在于:所述计量平台还包括照明灯(5),所述照明灯(5)位于支撑框架外部,为计量平台提供照明。
3.根据权利要求1所述的仿墨鱼吸盘原位环境吸力计量平台,其特征在于:所述支撑框架(1)包括盖板(12)和壳体(13),所述深水耐压电机(11)位于盖板(12)中心,并与盖板(12)通过螺栓固定,所述深水耐压电机(11)用于传动垂直传动机构(2)。
4.根据权利要求3所述的仿墨鱼吸盘原位环境吸力计量平台,其特征在于:所述盖板(12)和壳体(13)为透明材料,其中,壳体(13)上开有壳体透水孔(130)。
5.根据权利要求4所述的仿墨鱼吸盘原位环境吸力计量平台,其特征在于:所述计量平台还包括摄像头(6),所述摄像头(6)位于支撑框架外部,所述摄像头(6)通过透明的盖板(12)和透明壳体(13)观察计量过程。
6.根据权利要求3所述的仿墨鱼吸盘原位环境吸力计量平台,其特征在于:所述垂直传动机构(2)包括光轴(21)、丝杆(22)、弹性夹(23)和吸盘(24),其中:
7.根据权利要求6所述的仿墨鱼吸盘原位环境吸力计量平台,其特征在于:所述弹簧测力装置(3)包括“工”型吸板(31)、刻度柱(32)、刻度标识环(33)和弹簧(34),其中:
8.根据权利要求7所述的仿墨鱼吸盘原位环境吸力计量平台,其特征在于:所述计量平台还包括拉力传感器(8),所述弹簧(34)在安装前通过力传感器(8)进行标定。
9.根据权利要求7所述的一种仿墨鱼吸盘原位环境吸力计量方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种仿墨鱼吸盘原位环境吸力计量方法,其特征在于,所述计量方法还包括标定步骤:
技术总结本发明涉及海洋仿生工程技术领域,公开了一种仿墨鱼吸盘原位环境吸力计量平台,包括支撑框架、垂直传动机构和弹簧测力装置,所述支撑框架内部与垂直传动机构连接并在水平方向对垂直传动机构进行限位,弹簧测力装置位于垂直传动机构正下方,并通过螺栓与支撑框架固定。测力装置摒弃不耐水下高压的电信号传感器,改用结构简单紧凑的弹簧测力结构,这极大地提高了吸力计量平台的稳定性、耐久性以及在复杂海况下的环境适应性。技术研发人员:许多祥,范迪夏,崔维成,秦棒棒,李昀橦受保护的技术使用者:西湖大学技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/330340.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表