基于DEA驱动的多模式运动仿生水母软体机器人
- 国知局
- 2024-11-19 09:58:28
本发明涉及机器人,具体涉及一种基于dea驱动的多模式运动仿生水母软体机器人。
背景技术:
1、从古到今,人类对海洋的探索从未间断过,但到目前为止也只是探索了海洋中的很小一部分,随着探索的逐步深入,受深海中潜藏的危险以及人体机能上限等因素的限制,人类已无法完全靠自身完成更多的探索任务了。为此水下机器人应运而生,在海洋勘探、水质监测、生物研究、海底管道检测、目标搜救等多个领域都发挥了很高的应用价值。
2、公开号为cn116812120a的发明专利公开了一种仿生水母机器人,采用电机驱动凸轮,通过张拉结构传动连接,实现拨水运动。但电机驱动为刚性驱动,柔顺性差,且水母机器人本身的钟状体运动形态单一,不具备控制自身运动姿态的能力。因此,如何提供一种具有结构简单,响应速度快,操作简单方便,姿态控制灵活的仿生水母机器人,就需要进一步进行考虑。
技术实现思路
1、针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种结构简单,响应速度快,操作简单方便,姿态控制灵活的基于dea驱动的多模式运动仿生水母软体机器人。
2、为了解决上述技术问题,本发明采用如下技术方案:
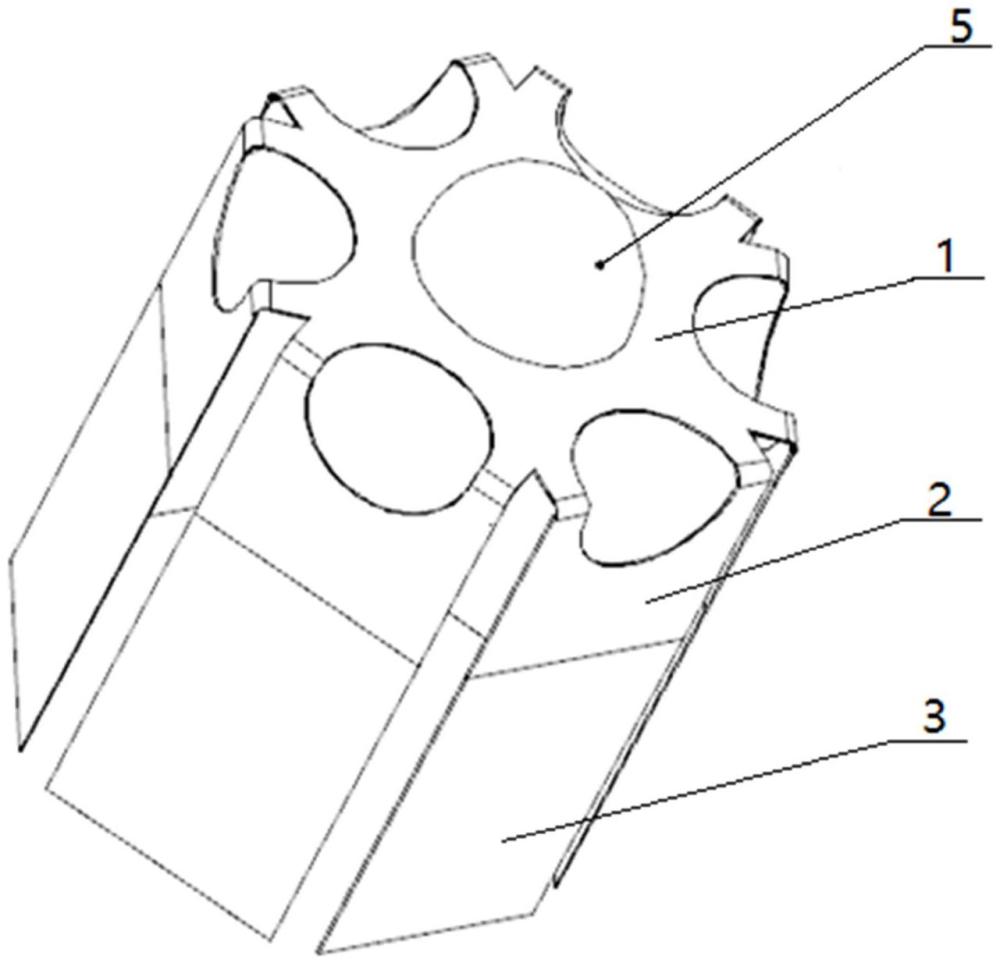
3、一种基于dea驱动的多模式运动仿生水母软体机器人,包括基体,基体的侧面上环形阵列设置有至少三个具有弹性变形能力的主支腿,每个主支腿上分别安装有dea驱动器,dea驱动器能够驱动其对应的主支腿执行向下来回弯曲运动,主支腿的端部设置有副支腿,副支腿的一端通过铰座与主支腿的端部铰接连接使得副支腿仅能够朝向基体的下方进行转动。
4、作为优化,所述铰座上凸起形成有能够抵接在所述主支腿上并对所述副支腿向下转动进行限位的限位凸挡,使得所述副支腿与所述主支腿之间能够形成夹角为锐角的转动范围。
5、作为优化,所述副支腿包括多节依次铰接连接在一起的节肢,相邻两节节肢仅能够朝向所述基体的下方进行转动,并且相邻两节节肢之间能够形成夹角为锐角的转动范围。
6、作为优化,所述主支腿和所述副支腿均为片状结构,所述主支腿所在平面与所述主支腿的弯曲摆动所在平面相垂直,所述副支腿所在平面与所述副支腿的转动平面相垂直。
7、作为优化,所述主支腿与所述基体为一体成型结构,所述主支腿上开设有减重孔。
8、作为优化,所述基体上固定连接有用于控制浮力大小的气腔。
9、作为优化,所述主支腿的数量为偶数个。
10、相比现有技术,本发明具有如下有益效果:本发明采用dea驱动器对主支腿进行驱动,通过控制dea驱动器的电压大小和频率,进而控制dea驱动器的扩张与收缩的大小以及频率,实现对主支腿的拨水控制;另外dea驱动器的扩张与收缩,分别控制主支腿的内外弯曲和恢复,在主支腿由向下的弯曲状态向上恢复的过程中,水阻能够使副支腿向下进行转动,减小副支腿的迎水面,进而减低水阻,当主支腿向下弯曲的过程中,水阻能够使副支腿向上转动以能够增加迎水面积,结合副支腿片状结构的特征,能够更好的对水进行拨动,提供更大的反向作用力为机器人提供运动的动力,并且还能够对不同的主支脚实施控制策略,实现姿态的调整。
技术特征:1.一种基于dea驱动的多模式运动仿生水母软体机器人,其特征在于:包括基体,基体的侧面上环形阵列设置有至少三个具有弹性变形能力的主支腿,每个主支腿上分别安装有dea驱动器,dea驱动器能够驱动其对应的主支腿执行向下来回弯曲运动,主支腿的端部设置有副支腿,副支腿的一端通过铰座与主支腿的端部铰接连接使得副支腿仅能够朝向基体的下方进行转动。
2.根据权利要求1所述的基于dea驱动的多模式运动仿生水母软体机器人,其特征在于:所述铰座上凸起形成有能够抵接在所述主支腿上并对所述副支腿向下转动进行限位的限位凸挡,使得所述副支腿与所述主支腿之间能够形成夹角为锐角的转动范围。
3.根据权利要求2所述的基于dea驱动的多模式运动仿生水母软体机器人,其特征在于:所述副支腿包括多节依次铰接连接在一起的节肢,相邻两节节肢仅能够朝向所述基体的下方进行转动,并且相邻两节节肢之间能够形成夹角为锐角的转动范围。
4.根据权利要求2所述的基于dea驱动的多模式运动仿生水母软体机器人,其特征在于:所述主支腿和所述副支腿均为片状结构,所述主支腿所在平面与所述主支腿的弯曲摆动所在平面相垂直,所述副支腿所在平面与所述副支腿的转动平面相垂直。
5.根据权利要求1所述的基于dea驱动的多模式运动仿生水母软体机器人,其特征在于:所述主支腿与所述基体为一体成型结构,所述主支腿上开设有减重孔。
6.根据权利要求1所述的基于dea驱动的多模式运动仿生水母软体机器人,其特征在于:所述基体上固定连接有用于控制浮力大小的气腔。
7.根据权利要求1所述的基于dea驱动的多模式运动仿生水母软体机器人,其特征在于:所述主支腿的数量为偶数个。
技术总结本发明公开了一种基于DEA驱动的多模式运动仿生水母软体机器人,包括基体,基体的侧面上环形阵列设置有至少三个具有弹性变形能力的主支腿,每个主支腿上分别安装有DEA驱动器,DEA驱动器能够驱动其对应的主支腿执行向下来回弯曲运动,主支腿的端部设置有副支腿,副支腿的一端通过铰座与主支腿的端部铰接连接使得副支腿仅能够朝向基体的下方进行转动。本发明采用DEA驱动器对主支腿进行驱动,通过控制DEA驱动器的电压大小和频率,进而控制DEA驱动器的扩张与收缩,实现对主支腿的拨水控制;另外DEA驱动器分别控制主支腿的向下弯曲和向上恢复,实现在不同方向上迎水面大小的控制,能够更好的对水进行拨动,提供更大的反向作用力为机器人提供运动的动力。技术研发人员:向浩敏,黄霞,谢一清,吴畅,丁军受保护的技术使用者:重庆理工大学技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/330920.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表