一种低光环境下小目标检测方法
- 国知局
- 2024-11-21 11:30:20
本发明设计涉及目标检测,尤其涉及一种基于改进swin transformer的低光环境下小目标检测方法。
背景技术:
1、在低光环境下进行小目标检测是一个极具挑战性的任务,尤其是在安防监控、夜间导航、野生动物观测等领域中,这一能力显得尤为重要。低光条件下的图像普遍受到拍摄设备传感器噪声的干扰,图像质量降低,目标特征不明显或丢失,这些因素都会对检测系统的性能造成显著影响。传统的小目标检测算法往往假设图像具有足够的亮度和对比度,这在低光环境下难以得到满足。低光图像中的高噪声和低对比度会严重影响算法提取目标特征的能力,导致检测性能下降。在低光环境下,小目标特征进一步减弱,使得依赖精细特征识别的算法难以准确识别目标。许多高精度的目标检测模型,尤其是基于深度学习的方法,需要大量的计算资源。这对于需要实时处理的应用场景,或是计算资源受限的移动和边缘设备,构成了显著的限制。
2、现有技术存在以下三个方面问题:第一,缺乏针对低光环境下的图像增强方法,现有图像增强方法获取的低光图像质量低,噪声高,对图像中的目标特征增强度不够;第二,对于现有小目标检测算法而言,在低光条件下准确提取目标特征的能力不足;第三,现有检测模型实用性较低,需要较高的计算资源的需求,缺乏在资源受限的环境中高效运行基础上,同时又可以保持较高检测准确率的模型。
3、综上所述,现有方法存在低光环境不适用、准确率较低、参数量大、实时性较差的问题。
技术实现思路
1、针对现有技术中的不足,本发明提供了一种低光环境下小目标检测方法,以解决现有技术中存在低光环境不适用、准确率较低、参数量大、实时性较差的技术问题。
2、本发明提供了一种低光环境下小目标检测方法,包括如下步骤:
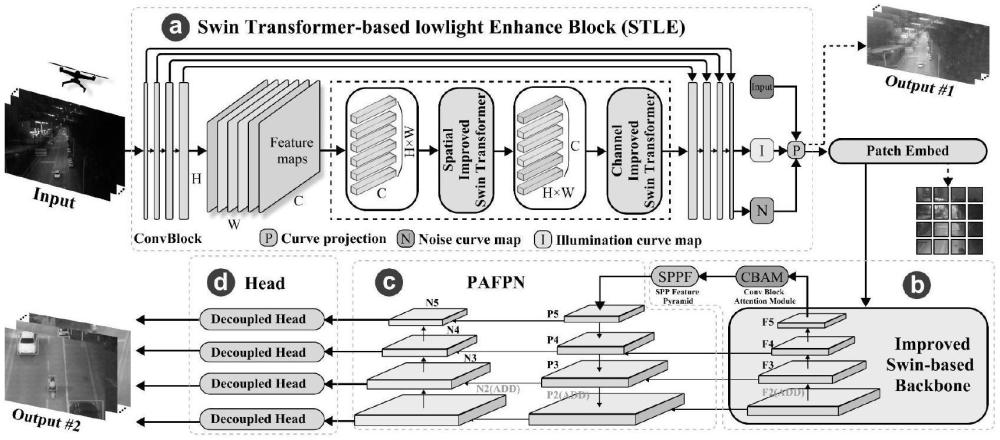
3、步骤1:构建u型的swin transformer与cnn混合结构,作为小目标检测模型的增强器;
4、步骤2:构建小目标检测模型的检测器,其中,检测器的主干网络包括:四个串接的部分,第一部分包括:patch embed层、swinstage层以及c2f层;其余每个部分包括:patchmerging层、swinstage层以及c2f层,主干网络可输出4个尺度的特征图,其中,swinstage层包括多个叠加的swin transformer;
5、步骤3:单独训练小目标检测模型的增强器和小目标检测模型的检测器,其中,将检测器主干网络的特征提取层作为增强器的损失函数中的一项;
6、步骤4:用训练好的小目标检测模型进行低光环境下小目标检测。
7、进一步地,所述swin transformer为改进后的swin transformer,具体为:
8、将swin transformer中mlp部分替换为深度可分离卷积残差网络。
9、进一步地,所述步骤1中,构建的u型混合结构中的convblock包括:2个5×5的卷积层,并使用rrelu作为激活函数。
10、进一步地,所述步骤2中,四个串接的部分中的每个swinstage层分别包括:2、2、6、2个相连叠加的swin transformer。
11、进一步地,每个swinstage层中的swin transformer的多头自注意力机制的个数分别为:3、6、12、24。
12、进一步地,所述步骤2中的c2f层为1x1与3x3的卷积层。
13、进一步地,所述步骤2中,四个串接的部分中的c2f层数量分别为:3、6、9、3。
14、进一步地,所述增强器的损失函数为:
15、
16、式中,cii、hi、wi分别为增强器中第i层特征图对应的c、h、w;fj(ifinal)为增强器的特征提取层,j是一维数组,数组中元素的个数与增强器中的特征提取层数量相同,数组中元素为选择的检测器的特征提取层序号;fi(y)为检测器的特征提取层。
17、进一步地,所述增强器的损失函数中的j中的元素为:2、5、8、11。
18、进一步地,所述步骤4中,将训练好的小目标检测模型的输出结果通过soft-nms算法处理获得最终的低光环境下小目标检测结果。
19、本发明的有益效果:
20、本发明在准确性较高以及参数量较少的检测模型中,选用swin transformer作为基础方法,同时,将swin transformer的mlp部分替换为dwres深度可分离卷积残差网络,在大幅度降低模型参数量的基础上提升了局部特征提取能力,既能服务于stle模块的降噪任务,又能提升sdb检测模块中主干网络的特征提取能力。
21、本发明的cnn擅长提取图像的局部特征,而swin transformer则能够利用其自注意力机制来捕获更广泛的全局依赖。这种混合结构可以让网络同时利用这两种特性,增强模型对图像内容的理解,从而更有效地进行图像降噪。
22、本发明的检测器主干网络通过swinstage不断加强对小目标特征的聚焦,通过patchmerging筛选细微特征并减少参数量,通过c2f对各尺度目标特征进行融合,最终有效输出4个不同尺度的特征层。
23、本发明的低光增强器将检测器对应的4层主干网络引入损失函数,使降噪任务针对小目标进行调整与优化,该设置能够有效地强化小目标的特征。
技术特征:1.一种低光环境下小目标检测方法,其特征在于,包括如下步骤:
2.如权利要求1所述的低光环境下小目标检测方法,其特征在于,所述swintransformer为改进后的swin transformer,具体为:
3.如权利要求1所述的低光环境下小目标检测方法,其特征在于,所述步骤1中,构建的u型混合结构中的convblock包括:2个5×5的卷积层,并使用rrelu作为激活函数。
4.如权利要求1所述的低光环境下小目标检测方法,其特征在于,所述步骤2中,四个串接的部分中的每个swinstage层分别包括:2、2、6、2个相连叠加的swin transformer。
5.如权利要求1或4所述的低光环境下小目标检测方法,其特征在于,每个swinstage层中的swin transformer的多头自注意力机制的个数分别为:3、6、12、24。
6.如权利要求1所述的低光环境下小目标检测方法,其特征在于,所述步骤2中的c2f层为1x1与3x3的卷积层。
7.如权利要求1或6所述的低光环境下小目标检测方法,其特征在于,所述步骤2中,四个串接的部分中的c2f层数量分别为:3、6、9、3。
8.如权利要求1所述的低光环境下小目标检测方法,其特征在于,所述增强器的损失函数为:
9.如权利要求8所述的低光环境下小目标检测方法,其特征在于,所述增强器的损失函数中的j中的元素为:2、5、8、11。
10.如权利要求1所述的低光环境下小目标检测方法,其特征在于,所述步骤4中,将训练好的小目标检测模型的输出结果通过soft-nms算法处理获得最终的低光环境下小目标检测结果。
技术总结本发明公开了一种低光环境下小目标检测方法,包括如下步骤:步骤1:构建U型的Swin Transformer与CNN混合结构,作为小目标检测模型的增强器;步骤2:构建小目标检测模型的检测器,其中,检测器的主干网络包括:四个串接的部分,第一部分包括:Patch Embed层、SwinStage层以及C2f层;其余每个部分包括:Patch Merging层、SwinStage层以及C2f层,主干网络可输出4个尺度的特征图,其中,SwinStage层包括多个叠加的Swin Transformer;步骤3:单独训练小目标检测模型的增强器和小目标检测模型的检测器,其中,将检测器主干网络的特征提取层作为增强器的损失函数中的一项;步骤4:用训练好的小目标检测模型进行低光环境下小目标检测。本发明适用低光环境、准确率高、实时性强。技术研发人员:王琦,戴滔,高尚,于化龙,解玄,张利伟受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/331508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。