立式转矩波动测试机校准装置及方法与流程
- 国知局
- 2024-11-21 11:30:29
本发明涉及转矩波动校准装置及方法,更具体地说,涉及立式转矩波动测试机校准装置及方法。
背景技术:
1、在高端装备制造、新能源汽车、智能机器人等现代工业领域,电机作为核心执行部件,其性能的优劣直接关系到整机的工作效率、运行平稳性和可靠性。转矩波动作为衡量电机性能的关键指标之一,准确测试和评估电机转矩波动水平,对于电机的设计优化和质量控制至关重要。
2、立式转矩波动测试机是目前业界广泛采用的电机性能测试设备,通过在电机输出轴上连接转矩传感器,可测量电机在不同转速和负载工况下的转矩波动特性。然而,由于转矩传感器在制造安装、长期使用以及环境温度变化等因素的影响下,其输入-输出特性往往会发生偏移或漂移,导致测试结果失真,严重影响了测试的精度和可靠性。因此,有必要对转矩传感器进行定期校准,以保证测试机的准确度。
3、传统的立式转矩波动测试机大多采用人工校准的方式,主要存在以下问题和不足:
4、1.校准操作复杂耗时。常规做法是在传感器上手动悬挂标准砝码,人工读取多点电压数据,再通过最小二乘法等数学方法拟合校准曲线。这种方式操作步骤繁琐,劳动强度大,校准效率低下。
5、2.校准精度不高。手动悬挂砝码容易产生位置偏心,难以保证力臂长度精准一致;人工读数存在随机误差和视差误差;加之环境因素干扰,最终校准精度难以满足高精度测试需求。
6、3.正反向特性难以兼顾。传感器在正向和反向载荷下的特性可能不完全对称,单一方向校准无法全面描述其力学特性,影响测试结果的可靠性。
7、4.线性拟合精度欠佳。许多校准方法基于线性拟合模型,忽略了部分传感器的非线性响应特点,难以全面、精确地刻画传感器的输入-输出关系,使校准精度受到限制。
8、5.缺乏自动化手段。传统校准方式依赖手动操作和人工判读,无法实现校准过程的自动化控制和实时监测,人为失误率高,数据可溯源性差,不利于校准规程的标准化和过程的信息化管理。
9、综上所述,传统的立式转矩波动测试机校准方法,由于机械装置布局不合理、缺乏自动化手段以及校准模型精度不高等问题,已难以满足现代工业测试对于转矩测量日益提高的精度需求,亟需开发操作简单、效率高、精度优的自动校准新方案。
技术实现思路
1、本发明正是针对上述技术问题,提出立式转矩波动测试机校准装置及方法,在机械设计上,采用线轮+磁吸底座的砝码悬挂装置,解决立式空间布局限制,实现标准力矩的快速、精准、自动化加载;软硬件系统集成架构,融合机械、电气、控制、计算机等多学科技术,实现从力学输入、电气采集、数据处理到校准拟合的全流程自动化。
2、立式转矩波动测试机的校准装置,包括:伺服电机、减速器、转矩传感器、机台平面、轴、连轴器、线轮、支架、开关式强力磁吸底座、定滑轮、细线和砝码;所述伺服电机、减速器、转矩传感器、轴、连轴器和线轮从下到上依次连接;所述磁吸底座通过支架固定在机台平面上,并连接定滑轮;细线一端缠绕在线轮上,另一端绕过定滑轮悬挂砝码。
3、具体地,所述砝码和细线组成砝码悬挂装置,实现在线轮上产生可调节的已知转矩,并通过线轮、连轴器、轴传递给转矩传感器,使转矩传感器输出与该转矩对应的电压值。
4、具体地,通过多次调节砝码的重量并采集对应的传感器电压值,得到一组转矩-电压校准点,未悬挂砝码时采集传感器的零点电压值;正向和反向分别悬挂砝码并逐级增加重量,分别得到正向和反向两组校准点。
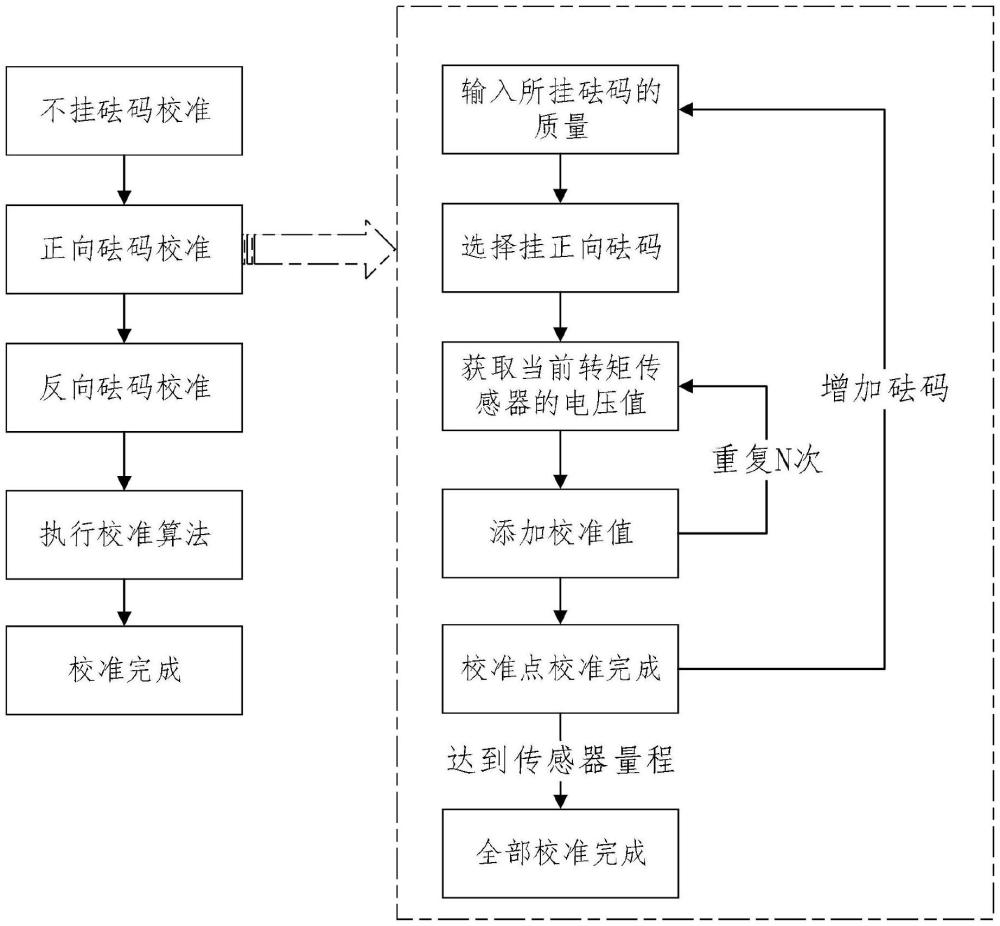
5、立式转矩波动测试机的校准方法,包括以下步骤:(1)不挂砝码,采集传感器零点电压;(2)正向悬挂砝码,增加砝码重量,采集不同砝码重量下传感器的电压值,获得一组正向校准点;(3)反向悬挂砝码,增加砝码重量,采集不同砝码重量下传感器的电压值,获得一组反向校准点;(4)综合正向校准点和反向校准点,通过数学拟合方法,建立传感器电压值和转矩值的校准函数关系式。
6、具体地,所述步骤(2)具体为:(1)在校准装置上正向悬挂已知重量m的砝码;(2)在软件上输入砝码的质量m;(3)点击软件上的"挂正向砝码"按钮;(4)点击软件上的"获取电压值"按钮,读取传感器输出电压值,重复n次读数;(5)计算n次电压读数的平均值,获得当前校准点;(6)点击软件上的"添加校准点"按钮;(7)增加砝码重量,重复步骤(1)至(6),直到获得m个正向校准点。
7、具体地,所述步骤(3)具体为:(1)在校准装置上反向悬挂已知重量m的砝码;(2)在软件上输入砝码的质量m;(3)点击软件上的"挂反向砝码"按钮;(4)点击软件上的"获取电压值"按钮,读取传感器输出电压值,重复n次读数;(5)计算n次电压读数的平均值,获得当前校准点;(6)点击软件上的"添加校准点"按钮;(7)增加砝码重量,重复步骤(1)至(6),直到获得p个反向校准点。
8、具体地,所述步骤(4)采用如下拟合校准算法建立校准函数关系式,包括以下步骤:
9、(1)标准砝码为mkg时与线轮半径r产生的标准转矩t(m)
10、fm=mg;tm=fmr=mgr
11、(2)校准方法
12、转矩传感器在砝码为m kg时的校准点n次读数的集合为
13、
14、转矩传感器在砝码为m kg时的校准点,n次读数的均值为
15、假设一共有m个不同重量m kg的砝码的校准点,则对应校准点的集合为
16、
17、根据m个校准点的集合,拟合出转矩传感器电压v与标准转矩tm的函数表达式f(.),tc=f(v)。
18、具体地,所述拟合方法为多项式拟合,包括以下步骤:
19、(3)校准拟合过程如下:
20、把m个校准点的集合表示为:
21、
22、为了简便,令(v,t)={(vi,ti)|i=1,2,...,m}
23、①定义多项式模型:
24、目标是找到一个多项式函数来拟合以下校准点的集合:
25、(v,t)={(vi,ti)|i=1,2,...,m}
26、设多项式的表达式为:
27、t=a0+a1v+a2v2+...+amvm
28、其中a0,a1,a2,...am是多项式的系数,m是多项式的阶数;
29、②定义损失函数
30、使用最小二乘法来确定多项式的系数,定义损失函数l为数据点与多项式模型的预测值之间的误差的平方和;
31、在这里,损失函数可以表示为:
32、
33、其中(vi,ti)是第i个校准点,m表示校准点的数量
34、③最小化损失函数
35、我们的目标是为了找到一组系数a0,a1,a2,...am,使得损失函数l达到最小值。为了找到最小值点,需要对损失函数中的每一个系数进行求偏导数操作,并令偏导数等于零;
36、具体来说,对于aj的偏导数为:
37、
38、对上述式子进行展开,并令偏导数为零:
39、
40、④解得多项式拟合的最优系数
41、整理得
42、
43、因此,我们得到了系数为a0,a1,a2,...am的线性方程组,我们可以使用线性代数中的方法来解这个方程组;
44、线性方程组可以表示为:
45、
46、其中,m表示校准点的数量,vi表示第i个校准点的自变量值,ti表示第i个校准点的因变量值,a0,a1,a2,...am表示我们要求解的多项式系数;
47、通过求解这个方程组,我们就可以得到多项式拟合的最优系数a0,a1,a2,...am;
48、⑤校准数据的使用
49、当校准完成且执行校准算法后,多项式拟合的系数a0,a1,a2,...am此时已知,假设立式转矩波动测试机台在使用时,采集到某个时刻t转矩传感器的电压为vt,则该时刻对应的校准后的转矩应为:
50、tt(vt)=a0+a1vt+a2vt2+...+amvtm。
51、具体地,所述拟合方法为分段式多项式拟合,包括以下步骤:
52、对于m个校准点总的集合:
53、(v,t)={(vi,ti)|i=1,2,...,m}
54、定义v的划分区间:
55、定义一组区间ik=[vk-1,vk),k=1,2,...,k,其中v0<v1<v2<...<vk是划分点,则k是划分区间的数量,划分点根据等间距划分;
56、划分后的子集合:
57、sk={(vk,tk)|k=1,2,...,k},{(vk,tk)∈(v,t):vk-1≤vk<vk}
58、对于每一个子集合,均使用多项式拟合,定义每一个子集合sk的多项式表达式为:
59、
60、因此,对每个子集合sk的多项式表达式,可以分别解出对应的多项式系数:
61、
62、校准数据的使用:
63、当校准完成且执行分段式多项式拟合校准算法后,对于每一个电压区间的子集合,多项式拟合的系数都是已知的;假设立式转矩波动测试机台在使用时,采集到某个时刻t转矩传感器的电压为vt,则该时刻对应的校准后的转矩应为:
64、
65、具体地,将步骤(4)得到的校准函数关系式存储在立式转矩波动测试机的控制器中,用于实时计算传感器输出电压对应的转矩测量值
66、本发明具有如下有益效果:
67、1.首先,在机械装置设计上,本发明采用线轮和磁吸底座组成砝码悬挂装置,利用砝码重力在线轮上产生横向拉力,通过轴系传递转换为转矩传感器的扭矩载荷,克服了传统立式转矩波动测试机校准困难的问题。同时,磁吸底座可方便地吸附和快速更换不同重量砝码,大大简化了校准操作流程。
68、其次,本发明将机械硬件与人机交互校准软件有机结合,形成完整的自动校准系统。上位机软件可精确控制校准规程,自动采集传感器电压信号,并对多次采样数据进行平均滤波处理,消除随机误差,提高单点校准精度。系统还引入了正向和反向两套校准流程,充分考虑了传感器正反向特性差异,从而进一步降低了系统误差。
69、最后,在校准算法层面,本发明的创新点在于,针对部分传感器非线性严重、分段特性明显的情况,提出了分段多项式拟合校准算法。该算法克服了普通多项式拟合算法的局限性,能够更精细地逼近传感器的真实输入-输出特性曲线,具有更强的非线性校准能力。值得一提的是,分段多项式算法的分段数是一个可调参数,可根据传感器特性和精度要求灵活设置,在计算效率和校准精度之间进行平衡。
70、综上,本发明在转矩校准装置、自动化系统和智能算法三个层面进行了系统优化,互为补充,相互促进,将机械设计、控制技术、信号处理和数值分析等多学科知识融为一体,较好地解决了立式转矩波动测试机校准操作复杂、人工校准精度不高等行业难题,实现了校准过程的自动化和校准精度的提升。与传统方案相比,本系统具有如下显著优点:
71、1.机械装置巧妙,满足立式空间布局限制,砝码悬挂和更换方便快捷;
72、2.硬件与软件结合紧密,实现闭环自动校准,降低人工操作失误;
73、3.正反向校准能够抵消传感器非对称性误差;
74、4.分段多项式拟合算法能够精确刻画传感器非线性输入-输出关系,提高校准精度;
75、5.算法分段数可调,在效率和精度之间权衡,具有更好的柔性和适应性。
76、这些协同创新优势,使得本发明的自动校准系统能够显著提升立式转矩波动测试机的测试精度和可靠性,减轻人工劳动强度,提高校准作业效率,为高端装备制造领域的电机性能测试提供了强有力的技术支撑,具有广阔的推广应用前景。
本文地址:https://www.jishuxx.com/zhuanli/20241120/331525.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表