一种基于图像配准的复杂背景红外图像背景运动补偿方法与流程
- 国知局
- 2024-11-21 11:39:45
本发明涉及一种基于图像配准的复杂背景红外图像背景运动补偿方法,属于图像处理领域。
背景技术:
1、下视复杂背景下的红外弱小目标检测在军事防御等关键领域展现出至关重要的应用价值,但是在应用的道路上挑战层出不穷,其中最为明显的便是如何在复杂背景中(如云层、地形、建筑物等)精准地分辨出能量显著较低的目标。在一些复杂的红外场景中,目标尺寸小、信号强度弱,并且背景杂波干扰严重,经典的空间域红外小目标检测算法在这种场景下检测效果往往不佳,而背景运动补偿可以弥补这些算法处理复杂背景图像时的不足。背景运动补偿一般通过计算背景运动的参数实现,将当前帧图像与背景运动补偿后的前一帧图像进行差分可以有效地消除背景,为后续的红外弱小目标检测提供更好的条件。
2、在众多背景运动补偿技术中,图像配准方法以其较高的精确性而广为应用。图像配准的核心在于检测图像中的特征点,并为这些特征点生成描述子。工程中最常用的图像配准算法是orb(oriented fast and rotated brief)算法,它结合了fast(features fromaccelerated segment test)特征点检测算法和brief(binary robust independentelementary features)描述子,通过增加特征点的方向信息,提高了对旋转的不变性,该算法因其较低的计算量和较高的准确性而受到青睐。但orb算法在对比度复杂变化、特征点密集的环境下匹配效果依然不佳,存在特征匹配误差较大等问题。
3、除了brief描述子,freak(fast retina keypoint)和beblid(binary enhancedbrief with linear iterative detection)也是常用的描述子,它们都具有高效的计算和存储优势。freak描述子模仿人类视网膜的采样模式,以更有效地捕捉和比较图像特征点;beblid描述子利用adaboost算法和不均衡的数据集进行训练,以提高其准确性和效率。但是上述描述子主要依据特征点的灰度分布情况形成特征向量,而对于红外图像中具有重复纹理的复杂背景,特征点周围的灰度分布相似性较高,因此生成的描述子也相似。这种相似性可能导致特征点在匹配过程中难以被清晰区分,从而可能引发误匹配,进而对变换矩阵的计算产生显著影响,最终影响背景运动补偿效果。
技术实现思路
1、本发明的技术解决问题是:克服现有技术的不足,提供了一种基于图像配准的复杂背景红外图像背景运动补偿方法,提高了背景运动补偿的效果和效率,为后续的红外弱小目标检测提供了更好的条件。
2、本发明的技术解决方案是:一种基于图像配准的复杂背景红外图像背景运动补偿方法,包括:
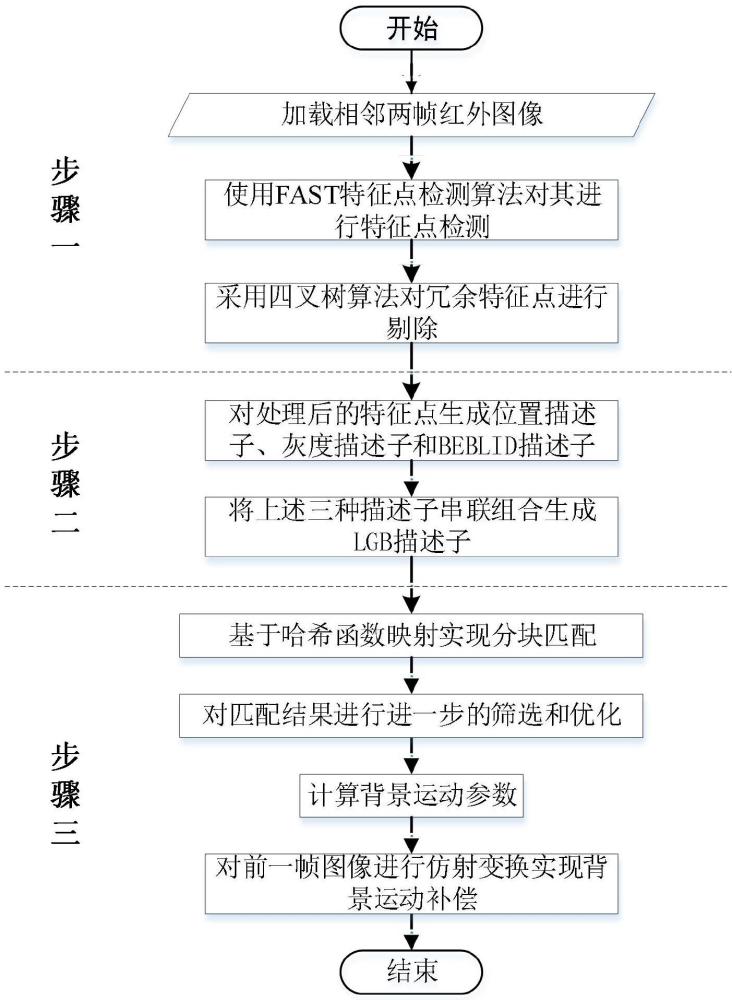
3、加载相邻两帧红外图像,使用fast特征点检测算法对图像进行特征点检测,然后采用四叉树算法剔除冗余特征点,得到剔除冗余特征点之后的预处理特征点;
4、生成位置描述子、灰度描述子,将位置描述子、灰度描述子与beblid描述子串联组合生成lgb描述子;使用lgb描述子对两幅图像中的所有预处理特征点进行特征描述;
5、将每幅图像分成四个象限区域,计算两幅图像中每个特征点的哈希键值,将不同象限区域的特征点坐标通过哈希函数映射到不同键值中,同一象限区域的特征点坐标通过哈希函数映射到相同的键值中;对两幅图像中的特征点依据哈希键值进行匹配,得到两幅图像中能够匹配的特征点对;并使用随机采样一致算法进一步筛选匹配特征点对,利用筛选确定的匹配特征点对计算最终背景运动参数,根据最终背景运动参数对两帧图像中的前一帧图像进行仿射变换实现背景运动补偿。
6、优选的,采用四叉树算法剔除冗余特征点的方法具体为:
7、s1-1首先创建一个母节点,该母节点为一帧图像的整个图像区域,母节点的特征点集合为整幅图像上通过fast特征点检测算法得到的所有特征点的集合;
8、s1-2将母节点按照四个象限分割成4个子节点,每个子节点为其中一个象限对应的区域;根据坐标象限区域,将母节点特征点集合中的特征点分配到相应子节点的特征点集合中;
9、s1-3创建变量count,统计特征点集合不为空的子节点数量,如果count没有达到期望的值或者每个子节点中的特征点数量均大于1:则对于特征点数量均小于等于1的子节点,将其标记为不需要进一步分割并停止处理;对于特征点数量大于1的子节点,则将其作为新的母节点、返回s1-2对每个新的母节点继续迭代;
10、s1-4当count达到期望的值或者每个子节点中的特征点数量均小于等于1,则提取每个子节点中响应值最大的特征点,四叉树算法结束;其中特征点的响应值定义为:以该特征点的位置为圆心,半径为3像素的圆内各像素的灰度值与该特征点灰度值差值的绝对值总和。
11、优选的,母节点的属性包括左上角坐标、右上角坐标、左下角坐标、右下角坐标以及包含的特征点集合。
12、优选的,每个子节点的属性包括其对应象限的左上角坐标、右上角坐标、左下角坐标、右下角坐标以及所在象限区域的特征点集合。
13、优选的,位置描述子dl(p)为:
14、
15、其中,a表示将全图划分成大小为a×a的网格,a的大小为描述子二进制位数的二分之一;m、n分别表示网格的行号和列号;:=表示“定义为”,即右边的表达式被定义为左边的名称。
16、优选的,灰度描述子dg(p)为:
17、
18、其中,表示向下取整;g(p)表示特征点p的灰度值,:=表示“定义为”,即右边的表达式被定义为左边的名称。
19、优选的,每个特征点的哈希键值h(p)的计算方法为:
20、
21、其中,表示向下取整;(x,y)表示特征点p的坐标值;w、h分别表示图像的宽度和高度。
22、优选的,同一象限区域的特征点坐标通过哈希函数映射到相同的键值中时,将象限交界区域的特征点分配一个独特的哈希键值,象限交界区域的大小依据两帧图像的视场差异来确定。
23、优选的,对两幅图像中的特征点依据哈希键值进行匹配,得到两幅图像中能够匹配的特征点对,具体为:
24、以第一幅图像中的每个特征点为基础在第二幅图像中寻找具有相同哈希键的特征点,并通过计算两个特征点的lgb二进制描述子的汉明距离来评估匹配的相似度,最终选择汉明距离最小的描述子对应的特征点作为匹配对。
25、优选的,使用随机采样一致算法筛选匹配特征点对,利用筛选确定的匹配特征点对计算最终背景运动参数,具体为:
26、使用随机采样一致算法进行迭代,每次迭代随机选择四个匹配特征点对作为子集来估计背景运动参数,并评估所有匹配特征点对中满足本次迭代所得背景运动参数的匹配对数量,选择满足估计的背景运动参数的匹配对数量最多的一组子集计算最终背景运动参数。
27、本发明与现有技术相比具有如下优点:
28、(1)本发明提出的背景运动补偿算法将位置和灰度信息加入描述子的构建方法,能够在对比度复杂变化、特征点密集、纹理重复的环境下有较好的匹配效果,提高了特征点匹配的精确度和区分能力,降低误匹配的概率,提升了背景运动补偿的效果,为后续的红外弱小目标检测提供了更好的条件;
29、(2)本发明将不同区域内的特征点坐标通过哈希函数映射到相应键值中,匹配时只查询相同键值内特征点,减少了匹配时的搜索范围与时间,节省了计算量。
本文地址:https://www.jishuxx.com/zhuanli/20241120/332294.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表