一种压电驱动的外管道攀爬机器人及其驱动方法
- 国知局
- 2024-11-21 11:52:56
本发明涉及管道机器人,尤其涉及一种压电驱动的外管道攀爬机器人及其驱动方法。
背景技术:
1、小直径金属或pe管材因其轻质、耐腐蚀、耐高压等特性,在现代工业和城市建设中得到了广泛的应用。这些管材通常用于供水、排水、燃气输送、化工管道、农业灌溉、以及电缆保护等多个领域。它们不仅提高了输送效率,还因其良好的密封性和耐久性,减少了维护成本和潜在的泄漏风险。然而,随着使用时间的增长,即使是高质量的管材也可能因为环境因素、材料老化或施工损伤等问题出现性能下降。定期的检测和检查对于确保管道系统的安全运行至关重要。它可以及时发现潜在的问题,比如腐蚀、裂纹、堵塞或其他结构性损伤,从而避免可能导致的泄漏、爆炸或服务中断等严重后果。鉴于此,外管道攀爬机器人的研究显得尤为重要。这些机器人能够自动或半自动地沿着管道移动,利用内置的传感器和摄像头对管道进行全面的检查。与传统检测方法相比,外管道攀爬机器人可以更高效、更安全地执行任务,尤其是在难以到达或危险的环境中。它们可以减少人工成本,降低作业风险,并提供更精确的检测数据。
2、目前,外管道攀爬机器人的种类很多,根据夹持方式可分为滚动式、夹持式、仿生式和吸附式。但是吸附式机器人通常依赖于真空吸附或磁性吸附,限制了它们的使用环境。轮式机器人主要设计用于圆柱形的攀爬杆,对于矩形或其他多边形的表面攀爬能力较弱。夹脚式机器人需要使用较大的电机和复杂的传动机构,以实现足够的负载能力。
3、基于上述机器人的缺点,压电式驱动机器人应运而生。相对于传统电机和气动元件,压电驱动器的高效率、高精度、断电自锁、快速响应能力、低噪声、抗电磁干扰等特点,使得机器人能够进行精确的位置和速度控制,对于提升检测任务的准确性与安全性至关重要。压点驱动传动简单效率更高,可实现更为紧凑、简单的结构设计,便于在狭窄的管道空间内灵活操作,降低了维护成本同时避免电磁干扰。此外,压电驱动器能够实现多样化的运动模式,包括弯曲和扭转,这为机器人在复杂管道结构中的作动提供了极大的灵活性。鉴于此,压电驱动的小型外管道攀爬机器人在提高管道检测效率、降低维护成本以及增强机器人环境适应性方面展现出巨大的优势。
4、然而,现有的压电驱动的机器人具有单一性,只能针对特定尺寸特定形状的管道使用,这给机器人的检测工作带来了极大的限制。因此现急需一种适应多种尺寸多种形状管道,稳定性强的压电驱动机器人。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种压电驱动的外管道攀爬机器人及其驱动方法,通过采用压电驱动技术,实现了机器人在管道中的高速度、快速响应及高定位精度。通过月牙形缺口爬行齿与弹性夹持结构的设计,大幅提升了机器人对不同管道形状和尺寸的适应能力。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、本发明第一方面提供了一种压电驱动的外管道攀爬机器人,包括换能器单元,
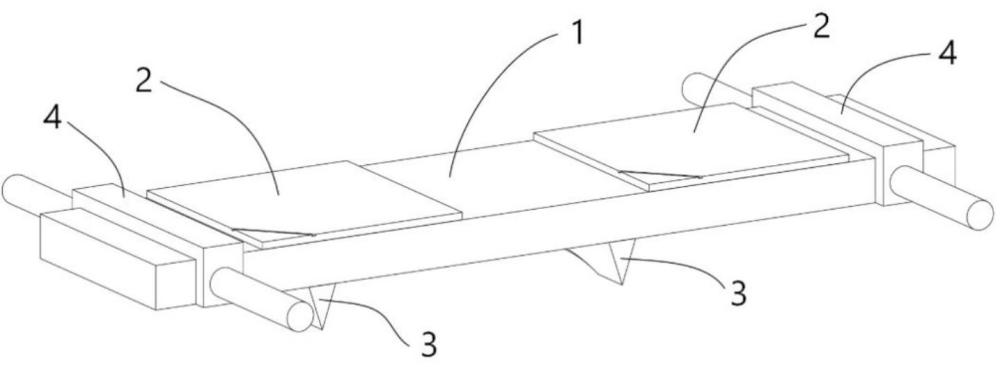
4、换能器单元包括振动机构和爬行机构,所述振动机构包括振动体和压电陶瓷片,所述振动体上表面设置有若干压电陶瓷片,振动体下表面设置有爬行机构,所述爬行机构包括若干爬行齿,爬行齿之间间隔设定距离,通过对压电陶瓷片施加激励电压,激励振动体振动,进一步带动爬行齿对地运动,实现机器人的攀爬过程。
5、进一步的,换能器单元还包括安装辊子,安装辊子包括前侧辊子和后侧辊子,分别安装在振动体的前端和后端,安装辊子用于固定夹持机构。
6、更进一步的,还包括夹持机构,所述夹持机构包括上下两个固定承载板,两个固定承载板上分别通过安装辊子安装一个换能器单元,通过螺丝将两个固定承载板连接,利用弹簧和螺母将螺丝固定。
7、进一步的,所述振动体采用氧化铝材料制成。
8、进一步的,所述振动体上表面通过耦合剂粘贴有同规格的两片纵振压电陶瓷片。
9、更进一步的,纵振压电陶瓷片沿厚度方向极化,且两片压电陶瓷片同向布置。
10、进一步的,爬行齿为三棱柱形状,其中一个矩形面与振动体下表面连接,与地面接触的棱中间采用弧线刃结构。
11、本发明第二方面提供了一种第一方面所述的压电驱动的外管道攀爬机器人的驱动方法,包括以下步骤:
12、对压电陶瓷片施加同幅值同频率的激励电压,激励振动体振动;
13、根据任务需要调整压电陶瓷片之间激励电压的相位差,使振动体带动爬行齿对地运动;
14、使用完成后,关闭激励电压,将换能器单元复位。
15、进一步的,当两激励信号的相位互差180°时,前侧压电陶瓷片在长度方向上伸长,后侧压电陶瓷片在长度方向上缩短,前侧压电陶瓷片在长度方向上缩短时,后侧压电陶瓷片在长度方向上伸长,在两压电陶瓷片激励下,促进振动体完成二阶弯曲振动,同时带动爬行齿对地运动,使换能器单元向后运动。
16、进一步的,当相位差为0°时,前后两侧压电陶瓷片动作相同,促进振动体完成三阶弯曲振动,同时带动爬行齿对地运动,使换能器单元向前运动。
17、以上一个或多个技术方案存在以下有益效果:
18、本发明公开了一种压电驱动的外管道攀爬机器人及其驱动方法,针对现有外管道攀爬机器人体积大、定位精度低、应用场景不足等问题,设计了一种压电驱动的小型外管道攀爬机器人。通过采用压电驱动技术,实现了机器人在管道中的高速度、快速响应及高定位精度。这一改进有效解决了传统驱动系统中传动结构臃肿的问题,显著降低了机器人在管道攀爬中的体积,提升了其适应性和控制精度,从而满足了复杂环境下的精确检测需求。此外,采用变频调相激发压电换能器单元同模变阶数作动方式,简化了机器人驱动和构型配置。这种设计降低了制造和装配过程中的误差,使得机器人系统更加简单、可靠。这一改进不仅提高了系统的可控性,也简化了多应用场景下的系统集成,极大地提升了机器人在不同工作环境中的应用灵活性。
19、本发明采用爬行齿的爬行齿上设计有类似月牙形缺口的弧线刃结构,设计的月牙形缺口爬行齿与弹性夹持结构大幅提升了机器人对不同管道形状和尺寸的适应能力。月牙形缺口爬行齿能够有效抓握圆管或方管等各种形状的管道,而弹性夹持结构则使机器人能够在不同管径的管道上稳定工作。这种设计增强了机器人的适用性,使其能够在多种管道条件下高效工作,从而拓宽了其应用范围,满足了不同管道检测和维护任务的需求。
20、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种压电驱动的外管道攀爬机器人,其特征在于,包括换能器单元,换能器单元包括振动机构和爬行机构,所述振动机构包括振动体和压电陶瓷片,所述振动体上表面设置有若干压电陶瓷片,振动体下表面设置有爬行机构,所述爬行机构包括若干爬行齿,爬行齿之间间隔设定距离,通过对压电陶瓷片施加激励电压,激励振动体振动,进一步带动爬行齿对地运动,实现机器人的攀爬过程。
2.如权利要求1所述的压电驱动的外管道攀爬机器人,其特征在于,换能器单元还包括安装辊子,安装辊子包括前侧辊子和后侧辊子,分别安装在振动体的前端和后端,安装辊子用于固定夹持机构。
3.如权利要求2所述的压电驱动的外管道攀爬机器人,其特征在于,还包括夹持机构,所述夹持机构包括上下两个固定承载板,两个固定承载板上分别通过安装辊子安装一个换能器单元,通过螺丝将两个固定承载板连接,利用弹簧和螺母将螺丝固定。
4.如权利要求1所述的压电驱动的外管道攀爬机器人,其特征在于,所述振动体采用氧化铝材料制成。
5.如权利要求1所述的压电驱动的外管道攀爬机器人,其特征在于,所述振动体上表面通过耦合剂粘贴有同规格的两片纵振压电陶瓷片。
6.如权利要求5所述的压电驱动的外管道攀爬机器人,其特征在于,纵振压电陶瓷片沿厚度方向极化,且两片压电陶瓷片同向布置。
7.如权利要求1所述的压电驱动的外管道攀爬机器人,其特征在于,爬行齿为三棱柱形状,其中一个矩形面与振动体下表面连接,与地面接触的棱中间采用弧线刃结构。
8.一种基于权利要求1-7任一项所述的压电驱动的外管道攀爬机器人的驱动方法,其特征在于,包括以下步骤:
9.如权利要求8所述的压电驱动的外管道攀爬机器人的驱动方法,其特征在于,当两激励信号的相位互差180°时,前侧压电陶瓷片在长度方向上伸长,后侧压电陶瓷片在长度方向上缩短,前侧压电陶瓷片在长度方向上缩短时,后侧压电陶瓷片在长度方向上伸长,在两压电陶瓷片激励下,促进振动体完成二阶弯曲振动,同时带动爬行齿对地运动,使换能器单元向后运动。
10.如权利要求8所述的压电驱动的外管道攀爬机器人的驱动方法,其特征在于,当相位差为0°时,前后两侧压电陶瓷片动作相同,促进振动体完成三阶弯曲振动,同时带动爬行齿对地运动,使换能器单元向前运动。
技术总结本发明公开了一种压电驱动的外管道攀爬机器人及其驱动方法,涉及管道机器人技术领域。该机器人包括换能器单元,换能器单元包括振动机构和爬行机构,振动机构包括振动体和压电陶瓷片,振动体上表面设置有若干压电陶瓷片,振动体下表面设置有爬行机构,爬行机构包括若干爬行齿,通过对压电陶瓷片施加激励电压,激励振动体振动,进一步带动爬行齿对地运动,实现机器人的攀爬过程。本发明通过采用压电驱动技术,实现了机器人在管道中的高速度、快速响应及高定位精度。技术研发人员:吴疆,丁兆春,李想,魏文韬,刘金硕,荣学文,宋锐,李贻斌受保护的技术使用者:山东大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333167.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表