一种基于导向滤波的遥感影像可视化增强方法与流程
- 国知局
- 2024-11-21 12:05:17
本发明涉及遥感影像增强,特别涉及一种基于导向滤波的遥感影像可视化增强方法。
背景技术:
1、在遥感图像中,具有12bit量化位数的遥感影像被广泛使用,其具有4096级的量化精度,遥感影像的高动态范围可获取地物更多信息,有利于图像识别和匹配。但是,普通显示设备只能显示8位及以内的影像,因此要显示12位量化的高动态遥感影像,需要进行遥感影像位数压缩,即需要对12bit量化的遥感影像进行可视化增强处理,以改善高动态范围影像在低动态范围条件下显示的视觉效果。可视化处理结果通过介质进行显示,在人眼的视觉特性作用下,达到尽可能复原原始场景的效果,使图像色彩自然、真实、丰富,方便目视解译、图像分类与提取等工作。
2、目前遥感影像可视化处理的传统方式主要有直方图截断处理、对数拉伸、直方图匹配、伽马变换、分段线性拉伸变换以及人工调整等全局或局部增强方法。上述方法会导致图像丢失暗部和亮部细节,导致图像阴影较黑、曝光严重,即使通过参数设置与调整,仍会因为场景差异大、环境天气复杂、动态范围较大,出现细节信息丢失、对比度低等问题,对可视化算法的鲁棒性具有较高的要求。
技术实现思路
1、本发明要解决现有技术中遥感影像可视化算法因全局线性压缩和增强时对图像明暗两端截取或保留数据量难以准确掌握而导致图像曝光区域过多或对比度较低的技术问题,提供一种基于导向滤波的遥感影像可视化增强方法。
2、为了解决上述技术问题,本发明的技术方案具体如下:
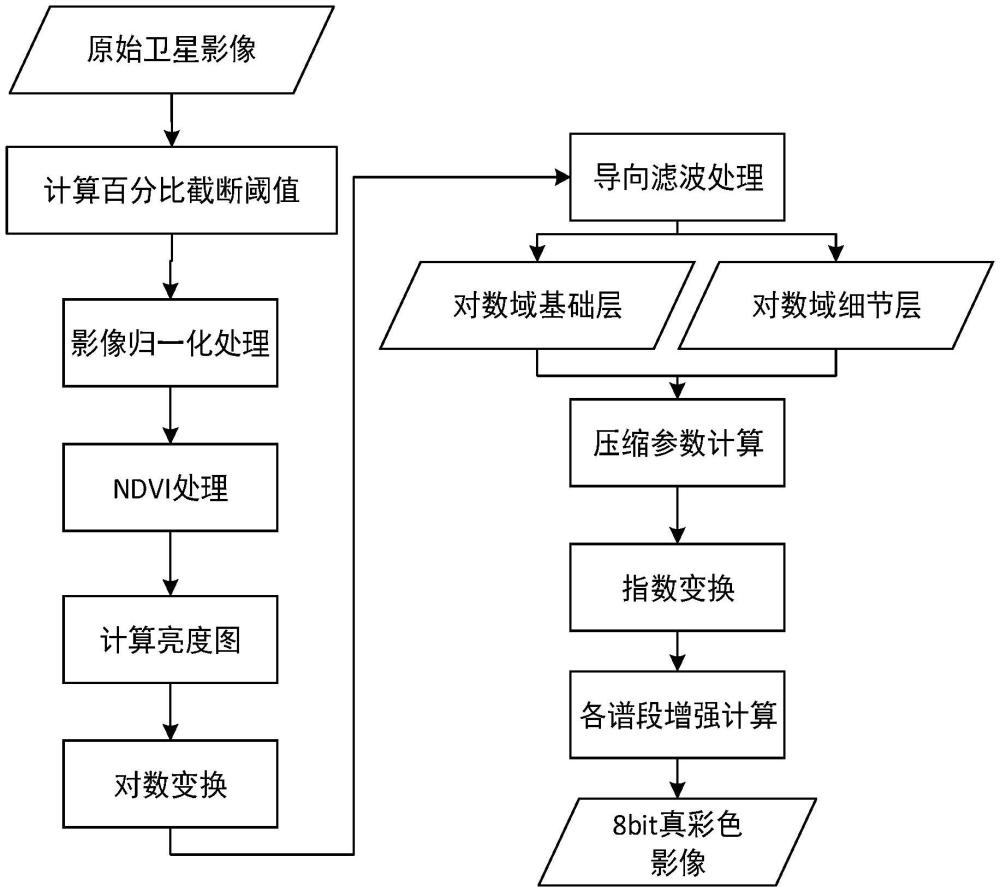
3、一种基于导向滤波的遥感影像可视化增强方法,包括以下步骤:
4、步骤一:对待处理原始卫星遥感影像dn值进行统计,统计像素值小于特定百分比和大于特定百分比的阈值;
5、步骤二:根据步骤一计算的百分比截断阈值,将遥感影像进行线性拉伸,得到归一化遥感影像;
6、步骤三:以步骤二得到的归一化遥感影像作为输入,对该归一化遥感影像进行ndvi指数增强,得到ndvi增强图;
7、步骤四:以步骤三得到的ndvi增强图为输入,利用各谱段归一化值进行加权,得到亮度图,同时将亮度图进行对数变换,得到对数域亮度图;
8、步骤五:以步骤四中得到的亮度图为输入,对该亮度图进行导向滤波处理,滤波后分离出基础层,将该基础层进行对数变换,得到对数域基础层;再利用步骤四中得到的对数域亮度图与前一步骤得到的对数域基础层相减,得到对数域细节层;
9、步骤六:利用步骤五得到的对数域细节层和对数域基础层和动态范围压缩参数,将对数域基础层进行压缩,得到压缩后的对数域增强层;
10、步骤七:将步骤六中得到的对数域增强层进行指数变换,得到增强层,并利用该增强层与步骤四计算得到的亮度图和原始卫星遥感影像进行计算,得到最终的可视化增强影像图。
11、在上述技术方案中,在步骤五中,
12、在导向滤波处理过程中,将引导图像、滤波输入图像和滤波输出图像分别表示为logi、p和q;引导滤波器由局部线性模型驱动,因此假设该引导滤波函数的输出和输入在一个二维窗口内满足线性关系,如下所示:
13、
14、其中,i是像素的索引,k是半径为r的局部方形窗口w的索引,ωk是方形窗口图像,ak是增益系数,bk是偏置系数;给定滤波输入图像p,定义最小化滤波输出图q与p之间的重建误差,代价函数为:
15、
16、其中,ε是正则化参数,对代价函数求最小值可得:
17、
18、bk=pk-akuk;
19、其中,pk和uk分别表示p,logi在窗口内的均值,σk是logi在窗口内的方差;
20、在将亮度图进行引导滤波时,把引导滤波用于边缘保持滤波器,令logi=p,ak和bk的结果为:
21、
22、bk=pk-akpk。
23、在上述技术方案中,在步骤五中,
24、在导向滤波过程中,将引导图像、滤波输入图像和滤波输出图像分别表示为logi、p和q;引导滤波器由局部线性模型驱动,因此假设该引导滤波函数的输出和输入在一个二维窗口内满足线性关系,如下所示:
25、
26、其中,i是像素的索引,k是半径为r的局部方形窗口w的索引,ωk是方形窗口图像,ak是增益系数,bk是偏置系数;给定滤波输入图像p,定义最小化输出图q与p之间的重建误差,代价函数为:
27、
28、其中,ε是正则化参数,对代价函数求最小值可得:
29、
30、bk=pk-akuk;
31、其中,pk和uk分别表示p,logi在窗口内的均值,σk是logi在窗口内的方差;
32、在将亮度图进行引导滤波时,把引导滤波用于边缘保持滤波器,令logi=p,ak和bk的结果表示为:
33、
34、bk=fmean(logi,r)-akfmean(logi,r);
35、其中,
36、
37、其中,m是输入图像,fmean(m,r)为经过均值滤波后得到的图像,s是以点(i,j)为中心的模板中像素的集合,模板尺寸为r×r;
38、base=fmean(ak,r)*logi+fmean(bk,r);
39、detail=logi-base;
40、其中,detail为对数域细节层,base为对数域基础层。
41、在上述技术方案中,步骤二中,归一化遥感影像的百分比截断阈值范围分布在[0,1]区间。
42、在上述技术方案中,步骤三中的对归一化遥感影像进行ndvi指数增强的计算公式如下:
43、
44、其中,greendn、reddn、nirdn分别为绿、红、近红外谱段原始dn值;greendn′为增强后绿谱段dn值。
45、在上述技术方案中,步骤四中,利用各谱段归一化值进行加权,得到亮度图,以及将亮度图进行对数变换,得到对数域亮度图的计算公式分别如下:
46、i=0.2989*reddn+0.587*greendn+0.114*bluedn;
47、logi=log2i;
48、其中,reddn、greendn、bluedn分别为红、绿、蓝谱段原始dn值,i为亮度图,对i取以2为底的对数得到对数域亮度图logi。
49、在上述技术方案中,步骤六中的压缩参数计算公式如下:
50、logenh=base*compression+detail;
51、其中,detail为对数域细节层,base为对数域基础层,logenh为对数域增强层,compression为动态压缩参数。
52、在上述技术方案中,步骤七中的计算公式如下:
53、对数域增强层进行指数变换,得到增强层,公式如下:
54、enh=2logenh;
55、其中,enh为增强层,logenh为对数域增强层;
56、再利用增强层与原始卫星遥感影像进行计算,得到可视化增强影像图,公式如下:
57、renh=reddn*enh;
58、genh=greendn*enh;
59、benh=bluedn*enh;
60、其中,reddn、greendn、bluedn分别为红、绿、蓝谱段原始dn值,renh、genh、benh分别为红、绿、蓝谱段增强后的值,enh为增强层。
61、本发明具有以下有益效果:
62、本发明的基于导向滤波的遥感影像可视化增强方法,通过使用较小的暗部和亮部百分比截断阈值,使图像在进行归一化时保留了大量的图像细节纹理和高亮区域色彩信息,为后续增强处理提供了条件。
63、本发明的基于导向滤波的遥感影像可视化增强方法,通过ndvi指数增强处理,使遥感影像植被区域色彩更加丰富。
64、本发明的基于导向滤波的遥感影像可视化增强方法,通过将三谱段rgb彩色图像转换为亮度图像,将多谱段色彩增强问题转换单谱段色彩增强问题,能够保证不破坏色彩白平衡,防止出现色偏。
65、本发明的基于导向滤波的遥感影像可视化增强方法,引入了基础层和细节层概念,在对数域对基础层进行可视化增强,同时保留图像细节层信息,并通过合理的动态范围压缩设置,实现图像亮度提升。
66、本发明的基于导向滤波的遥感影像可视化增强方法,利用导向滤波算法对图像亮度图进行细节层和基础层提取,并只对基础层进行压缩,遥感影像在保证图像局部细节纹理特征且不产生较多曝光区域的情况下,从而实现对遥感影像的色彩丰富、高对比度的可视化增强处理。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334218.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。