一种低风速永磁直驱风电机组的谐波抑制降耗控制方法
- 国知局
- 2024-11-21 12:06:30
本发明涉及一种控制方法,尤其是一种低风速永磁直驱风电机组的谐波抑制降耗控制方法,属于风电。
背景技术:
1、永磁同步风力发电机(pmsg)已广泛应用于垂直轴和水平轴风力发电系统,其变流器系统由机侧变流器(msc)和网侧变流器(gsc)组成。
2、低风速风电已经成为我国重点开发的风电之一。对于低风速发电,必然要求整个风电机组的自身损耗低,因此降低风力发电机及其变流器的损耗尤其必要,也是难题之一。另一方面,低风速风电场,湍流强、风向多变、风速波动大,时常造成风电机组外界干扰的不确定性;而且,风电机组的长期运行也会导致电机自身参数发生变化,这些都给低风速永磁直驱风电机组的控制提出了巨大挑战。因此,实现低风速风电机组的稳定控制,有效降低pmsg定子电流谐波和变流器的自身损耗是实现低风速风电机组高效运行的重要措施之一。
3、低风速永磁直驱风电机组中的谐波主要来源于pmsg和变流器。pmsg中的谐波由发电机本身结构和机侧变流器中非线性器件引起,谐波电流在发电机内部产生的磁场与基波电流磁场相互作用,产生影响发电机转动的脉动转矩,增加发电机的损耗,降低输出功率。永磁体受到涡流的影响而发热,严重时会永久失去磁性。此外,由于电网电压不平衡和网侧变流器中非线性器件的影响,并网电流中也会有大量谐波。
4、对于机侧变流器,当使用转子磁场定向的矢量控制时,需要对定子电流进行坐标变换来获得dq轴电流,一般采用零d轴电流(zdc)控制策略控制无功电流,使id=0。但是当永磁体采用不对称形状、非传统径向充磁时,永磁体磁场最强的方向不一定是n极方向。再考虑永磁体安装等工艺,d轴位置角不能简单地由位置传感器获得的转子永磁体位置角乘以极对数表示。因此如果使用位置传感器,会使得无功电流id≠0,定子电流与电压不能同相运行,产生更多谐波,造成更多损耗。
5、目前,永磁直驱风电机组的msc,其拓扑结构分为vsc和维也纳(vienna)整流器。鉴于维也纳整流器电流谐波小、功率器件电压应力低且无死区时间、损耗小等优点,而在风电领域日益受到重视。但维也纳整流器需要平衡中点电压,且随着风速的增加,中点电压不平衡会越来越严重,如果控制不好,最终将损坏维也纳整流器。
6、对采用vienna整流器作为msc的永磁直驱风电机组(pgvr)来说,目前常用的控制方法有pid控制和模型预测控制(mpc)。pid控制可靠性高,易于编程,但由于其参数固定,所以很难在不同风速下都达到控制效果的最优。mpc通过设计适当的代价函数实现了pgvr机组的性能最优。但mpc是通过比较不同开关状态的代价大小来选择双向开关管下一时刻的动作,因此mpc需要具有调制功能,这就要求mpc需要通过具有较高计算速度的硬件来实现。
7、对于网侧变流器gsc,常规的lcl滤波器体积大、笨重、损耗高;而传统有源阻尼控制采用控制算法增加系统阻尼,不使用额外器件,因而无附加损耗,但需要传感器辅助实现阻尼电阻的功能,还可能引起相位裕度减小和稳态误差等问题,为此,有必要研究改进型有源阻尼控制策略,以有效解决上述问题,并实现gsc轻量化、小型化、低功耗。
技术实现思路
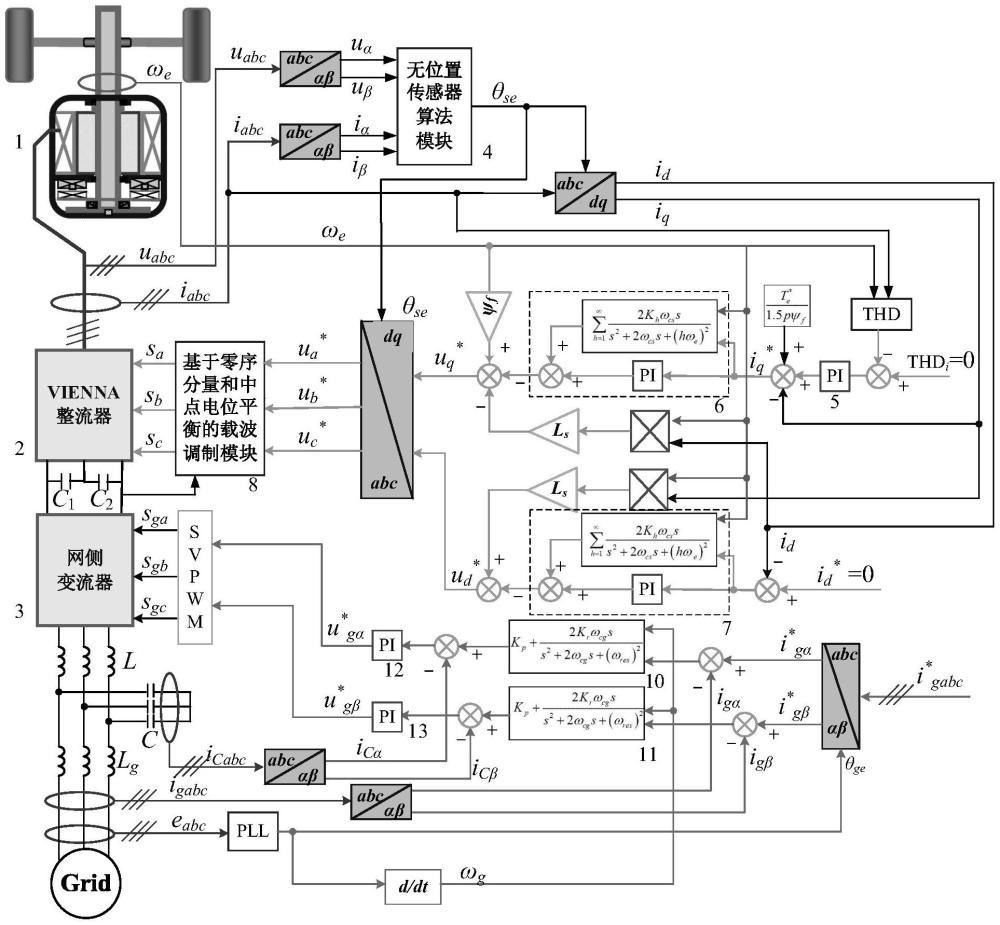
1、本发明的主要目的在于:针对上述现有技术存在的不足,本发明提供一种低风速永磁直驱风电机组的谐波抑制降耗控制方法,采用维也纳整流器作为机侧变流器,使用基于滑模观测器的无位置传感器算法精确获取d轴位置角,采用比例积分谐振控制器、基于零序电流注入和中点电位平衡的载波调制技术和改进有源阻尼控制策略等对谐波进行抑制,实现降低定子电流和并网电流谐波含量、减小变流器自身损耗、抑制中点电位振荡等多目标任务的最优控制,从而确保实现低风速永磁直驱风电机组有效控制和高效运行,使其功耗最小化。
2、为了达到以上目的,本发明所述低风速永磁直驱风电机组,包括:永磁同步风力发电机、机侧变流器、网侧变流器等;所述机侧变流器一端与所述永磁同步风力发电机的定子相连,另一端与所述网侧变流器相连;所述网侧变流器通过工频变压器与电网相连。
3、所述机侧变流器采用维也纳整流器,所述维也纳整流器包括三个滤波电感、三个双向开关单元、两个输出电容;所述三个滤波电感的一端分别与所述永磁同步风力发电机的定子三相绕组相连;所述两个输出电容为串联连接,其中,与所述维也纳整流器的直流输出端正极相连的输出电容称为上电容,与所述维也纳整流器的直流输出端负极相连的输出电容称为下电容。所述网侧变流器为电压源变流器,所述电压源变流器包括lcl滤波器。
4、本发明一种低风速永磁直驱风电机组的谐波抑制降耗控制方法,包括以下步骤:
5、步骤1,采用基于滑模观测器的无位置传感器算法获取d轴位置角θse;具体过程为:
6、11)所述永磁同步风力发电机的定子输出频率和幅值均可变化的三相交流电,其电压分别记为ua、ub、uc,其电流分别记为ia、ib、ic;将ua、ub、uc经abc/αβ坐标变换得到uα和uβ;将ia、ib、ic经abc/αβ坐标变换得到iα和iβ;
7、12)所述永磁同步风力发电机在αβ坐标系下的电压方程为
8、
9、式中,ls为定子电感;rs为定子电阻;ωe为所述永磁同步风力发电机的电角速度;ψf为所述永磁同步风力发电机的转子永磁体磁链;θse为d轴相位角,并且有
10、
11、式中,esα、esβ分别为反电动势的α轴和β轴分量;
12、13)为便于应用滑模观测器来估计反电动势,将式(1)的电压方程改写为电流状态方程形式:
13、
14、14)为获得反电动势esα、esβ的估计值esα,e、esβ,e,滑模观测器设计为:
15、
16、式中,iα,e、iβ,e分别为所述滑模观测器输出的定子电流iα、iβ的估计值;uα、uβ为所述滑模观测器的输入值。
17、15)将式(3)、(4)进行作差,可得定子电流误差方程为:
18、
19、16)滑模控制率设计为:
20、
21、式中,sgn()为符号函数;k为发电机空载反电动势最大幅值,且满足:
22、
23、17)滑模面设计为(iα-iα,e)、(iβ-sβ,e),通过在正、负滑模面间高速切换,使反电动势误差(esα-esα,e)、(esβ-esβ,e)迅速收敛为0,此时可得:
24、
25、实际运行中esα,e、esβ,e是不连续的高频切换信号,为获取连续波形,需要外加低通滤波器,即表示为:
26、
27、式中,τ0为低通滤波器的时间常数;
28、18)在获得esα、esβ后,通过反正切函数方法获得θse,即表示为:
29、
30、滤波处理会引发相位延迟,在式(10)基础上添加角度补偿,即表示为:
31、
32、式中,ωc为低通滤波器的截止频率,且有ωc=1/τ0;
33、步骤2,对于所述机侧变流器,采用谐振角频率可变的比例积分谐振控制器对指定次谐波进行抑制;具体过程为:
34、21)根据所述永磁同步风力发电机的电角速度ωe,得到定子电流的基波频率,然后对定子电流is进行快速傅里叶分解,按照式(12)求得电流畸变率thd:
35、
36、式中,i1为基波电流幅值,ik为第k次谐波电流幅值。
37、22)所述永磁同步风力发电机的定子电压、电流经abc/dq坐标变换分别得到ud、uq和id、iq;
38、23)设定thd的参考值thd*=0,将此参考值与其实际值做差输入第一pi控制器,所述第一pi控制器的输出与te*/(1.5pψf)相加,得到iq参考值iq*,其中te*为所述永磁同步风力发电机的电磁转矩te的参考值;
39、24)将定子电流的参考值iq*与其实际值iq做差,输入第一比例积分谐振控制器,所述第一比例积分谐振控制器的输出与q轴前馈解耦补偿项-ωelsid+ωeψf相加,得到所述永磁同步风力发电机的定子电压的q轴分量uq的参考值uq*;
40、所述第一比例积分谐振控制器的传递函数为:
41、
42、式中,kp为比例系数,ki为积分系数;ωcs为控制器带宽;h为谐波阶数;kh为h次谐波谐振增益系数。
43、25)令所述永磁同步风力发电机的定子电流的d轴分量id的参考值id*=0,并将之与其实际值id做差输入第二比例积分谐振控制器,所述第二比例积分谐振控制器的输出与d轴前馈解耦补偿项ωelsiq相加,得到所述永磁同步风力发电机的定子电压的d轴分量ud的参考值ud*;
44、所述第二比例积分谐振控制器的传递函数与所述第一比例积分谐振控制器的传递函数相同。
45、步骤3,采用基于零序分量注入和中点电位平衡的载波脉宽调制技术对所述维也纳整流器实施控制;具体过程为:
46、31)将步骤24)和25)得到的定子电压参考值uq*和ud*,经dq/abc变换得到电压ua、ub、uc的参考值ua*、ub*、uc*,令所述维也纳整流器的直流侧电压udc的一半作为基准值,即udc/2,对ua*、ub*、uc*进行标幺化,分别得到标幺值uap*、ubp*、ucp*,求出uap*、ubp*、ucp*中的最大值和最小值,分别记为upmax、upmin;
47、32)定义零序分量为u0:
48、u0=-0.5(upmax+upmin) (14)
49、33)将所述零序分量分别注入uap*、ubp*、ucp*,得到map*、mbp*、mcp*,求出map*、mbp*、mcp*中的最大值和最小值,分别记为mpmax、mpmin;
50、34)测量所述维也纳整流器的上电容的两端电压u1和下电容的两端电压u2;两者做差输入第二pi控制器,所述第二pi控制器的输出记为抑制因子z;
51、35)将所述抑制因子z经过限幅器对其限幅,其上限为1-mpmax,其下限位-1-mpmin;
52、36)将经过限幅器的抑制因子z分别与步骤33)得到的map*、mbp*、mcp*相加,得到修正后的电压参考值uam*、ubm*、ucm*;
53、37)将修正后的电压参考值uam*、ubm*、ucm*通过载波脉宽调制得到所述维也纳整流器的三个双向开关单元的驱动信号,驱动三个双向开关单元工作;
54、步骤4,所述网侧变流器采用电容电流反馈的有源阻尼控制和准比例谐振控制相结合控制策略,进行网侧电流滤波;具体过程为:
55、41)外环采用准谐振控制:将满足并网要求的三相电流值作为网侧三相电流的参考值i*gabc,控制目标为使滤波器输出电流与电网电压同相,即:
56、将参考电流i*gabc经abc/αβ坐标变换得到igα*和igβ*,分别与各自的实际电流igα和igβ进行做差后,分别输入至第一准比例谐振控制器和第二准比例谐振控制器;
57、准比例谐振(qpr)控制器的传递函数为
58、
59、式中,kp为比例增益系数;kr为谐振增益系数;ωcg为控制器带宽;ωres为谐波频率。
60、42)内环采用电容电流反馈有源阻尼控制:将lcl滤波电路中电容支路电流icabc,经abc/αβ坐标变换得到icα和icβ,步骤41)所述第一准比例谐振控制器的输出与icα做差,经第三pi控制器得到并网电压参考值ugα*;步骤41)所述第二准比例谐振控制器的输出与icβ做差,经第四pi控制器得到并网电压参考值ugβ*;
61、43)将ugα*和ugβ*经svpwm模块调制后产生驱动信号,驱动所述网侧变流器的功率开关管,控制所述网侧变流器工作。
62、与现有技术相比,本发明的有益效果是:
63、1.使用维也纳整流器作为机侧变流器,采用无位置传感器算法、比例积分谐振控制器、中点电位平衡控制法等,实现了多目标任务的最优控制,提高了电能质量,有效抑制了永磁同步风力发电机的定子电流谐波畸变,降低了风力发电机、机侧变流器的功率损耗。
64、2.采用电容电流反馈的有源阻尼控制与准比例谐振控制相结合控制策略,不仅可大大降低并网电流总谐波畸变率,而且可采用更小的滤波电感器,从而实现滤波器轻量化、小型化,进一步降低风电机组成本和功率损耗。
65、3.可实现低风速永磁直驱风电机组的低功耗、轻量化、小型化、低成本、高效率的目标。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334356.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表