一种基于自抗扰的差动转向容错控制方法及系统
- 国知局
- 2024-11-21 12:08:17
本技术涉及汽车控制,尤其涉及一种基于自抗扰的差动转向容错控制方法及系统。
背景技术:
1、作为车辆横向控制系统,线控转向系统具备控制精度高、响应速度快等优点,能够显著提高车辆操控性能,为自动驾驶提供了发展基础。但是由于线控转向系统依赖电子信号和电控元件实现转向控制,一旦系统发生故障,驾驶员将无法通过传统的机械连接控制车辆转向,可能会导致车辆偏离车道、发生碰撞等严重事故,对行车安全造成极大威胁。
2、针对线控转向失效,一个有效的应对策略便是独立控制四轮驱制动力,实现差动转向。一方面,左右车轮地面驱制动力可以围绕主销产生驱动转向梯形的差动力矩,实现车辆转向;另一方面,左右车轮地面驱制动力可绕车辆质心产生附加横摆力矩,控制车辆横向运动。因此差动转向可以视为线控转向系统失效后的备份转向系统,提高车辆的容错能力。
3、目前,转向系统失效后差动转向控制方法主要有pid、smc、lqr、mpc等方法。其中,pid是基于误差的无模型控制方法,结构简单、设计方便,但鲁棒性较差;smc、lqr和mpc对系统不确定性和未知多源扰动都具有一定的鲁棒性,但smc存在高频抖振问题,对模型精确度要求较高;lqr主要适用于线性系统,且需要求解黎卡提方程,计算较为复杂;mpc需要实时求解优化问题,对计算资源要求高,而且系统模型不确定会影响控制效果。因此,亟需一种不依赖精确模型且具备强鲁棒性的差动转向容错控制方法。
技术实现思路
1、针对上述需要解决的技术问题,本技术提供了一种基于自抗扰的差动转向容错控制方法及系统,不依赖精确模型且具备强鲁棒性,能够提高线控转向失效后的横向控制能力。
2、为达上述目的,本技术第一方面实施例提出了一种基于自抗扰的差动转向容错控制方法,包括:
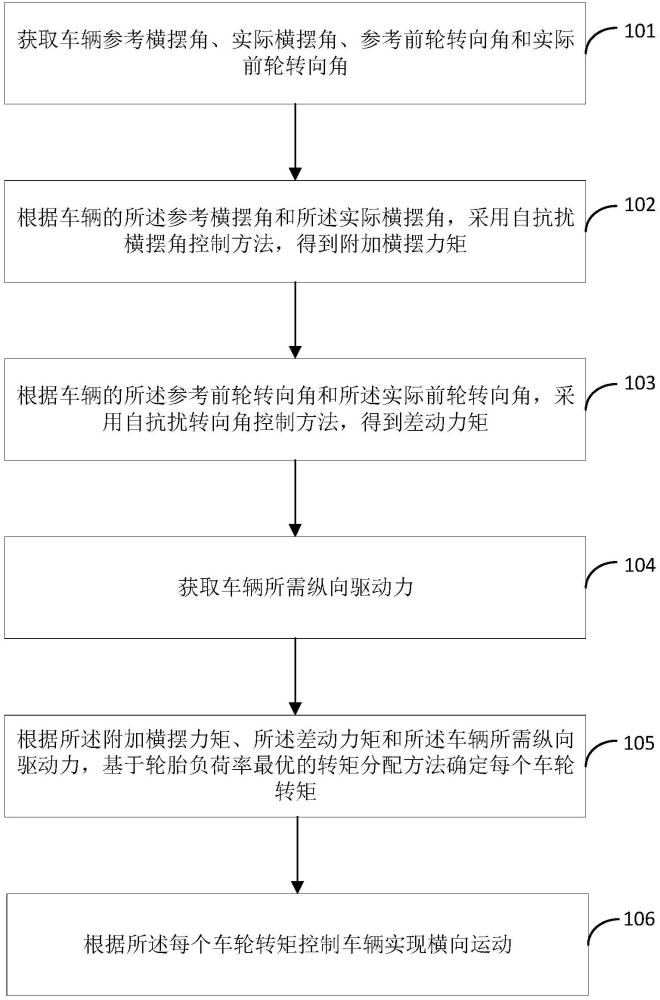
3、获取车辆参考横摆角、实际横摆角、参考前轮转向角和实际前轮转向角;
4、根据车辆的所述参考横摆角和所述实际横摆角,采用自抗扰横摆角控制方法,得到附加横摆力矩;
5、根据车辆的所述参考前轮转向角和所述实际前轮转向角,采用自抗扰转向角控制方法,得到差动力矩;
6、获取车辆所需纵向驱动力;
7、根据所述附加横摆力矩、所述差动力矩和所述车辆所需纵向驱动力,基于轮胎负荷率最优的转矩分配方法确定每个车轮转矩;
8、根据所述每个车轮转矩控制车辆实现横向运动。
9、可选的,所述根据车辆的所述参考横摆角和所述实际横摆角,采用自抗扰横摆角控制方法,得到附加横摆力矩,包括:
10、构建车辆横摆动力学模型,并将其写为积分串联型的形式;
11、根据所述参考横摆角构造第一微分跟踪器,通过所述第一微分跟踪器对所述参考横摆角进行平滑处理,得到平滑的参考横摆角和参考横摆角的一阶导数;
12、根据当前时刻车辆的所述实际横摆角和上一时刻的附加横摆力矩,构造第一扩张状态观测器,通过所述第一扩张状态观测器实时估计当前时刻的实际横摆角、实际横摆角的一阶导数、第一未建模动态及未知多源扰动;
13、结合所述第一扩张状态观测器的估计结果构造第一非线性反馈控制律,根据所述第一非线性反馈控制律得到当前时刻的附加横摆力矩。
14、可选的,所述构建车辆横摆动力学模型,并将其写为积分串联型的形式,包括:
15、构建车辆横摆动力学模型,具体公式如下:
16、
17、式中,r为车辆横摆角,vx为车辆纵向速度,vy为车辆横向速度,δf为前轮转向角,δm为附加横摆力矩,d1为第一未知多源扰动,cf为前轮胎的侧偏刚度,cr为后轮胎的侧偏刚度,lf为车辆质心到前轴的距离,lr为车辆质心距后轴的距离,iz为车辆绕z轴的转动惯量;
18、将构建的所述车辆横摆动力学模型写为积分串联型的形式,具体公式如下:
19、
20、式中,y1=r,u1=δm,
21、可选的,所述第一微分跟踪器被构造为:
22、
23、式中,r1(k+1)为第k+1时刻的平滑参考横摆角,r2(k+1)为第k+1时刻的平滑参考横摆角一阶微分,r1(k)为第k时刻的平滑参考横摆角,r2(k)为第k时刻的平滑参考横摆角一阶微分,rd(k)为第k时刻的参考横摆角,h1为采样周期,λ1为决定跟踪快慢的参数,fst(*)函数为最速控制综合函数;
24、所述第一扩张状态观测器被构造为:
25、
26、式中,z1为实际横摆角估计值,z2为实际横摆角一阶导数估计值,z3为第一未建模动态及扰动的估计值,e01为实际横摆角估计误差,fal(*)函数为最速控制综合函数,β01,β02,β03,α01,α02,κ1均为第一扩张状态观测器参数;
27、所述第一非线性反馈控制律的数学方程为:
28、u1=β1fal(e1,α1,λ2)+β2fal(e2,α2,λ2)+b1z3
29、式中,e1为实际横摆角跟踪误差且e1=r1-z1,e2为实际横摆角一阶导数跟踪误差且e2=r2-z2,β1,β2,α1,α2,λ2均为第一非线性反馈控制律参数。
30、可选的,所述根据车辆的所述参考前轮转向角和所述实际前轮转向角,采用自抗扰转向角控制方法,得到差动力矩,包括:
31、构建线控转向执行系统等效动力学模型,并将其写为积分串联型的形式;
32、根据所述参考前轮转向角构造第二微分跟踪器,通过所述第二微分跟踪器对所述参考前轮转向角进行平滑处理,得到平滑的参考前轮转向角和参考前轮转向角的一阶导数;
33、根据当前时刻的所述实际前轮转向角和上一时刻的差动力矩,构造第二扩张状态观测器,通过所述第二扩张状态观测器实时估计当前时刻的实际前轮转向角、前轮转向角的一阶导数、第二未建模动态及未知多源扰动;
34、结合所述第二扩张状态观测器的估计结果构造第二非线性反馈控制律,根据所述第二非线性反馈控制律得到当前时刻的差动力矩。
35、可选的,所述构建线控转向执行系统等效动力学模型,并将其写为积分串联型的形式,包括:
36、构建线控转向执行系统等效动力学模型,具体公式如下:
37、
38、其中,δf为车辆前轮转向角,δmz为差动力矩,ts代表转向电机输出的等效力矩,当线控转向系统完全失效时,ts=0;τz为左前轮和右前轮回正力矩之和,τf代表转向执行机构摩擦阻力矩,d2为第二未知多源扰动,jeq和beq分别为转向执行机构的等效转动惯量和等效阻尼;
39、将构建的所述线控转向执行系统等效动力学模型写为积分串联型的形式,具体公式如下:
40、
41、其中,y2=δf,u2=δmz,
42、可选的,所述第二微分跟踪器被构造为:
43、
44、式中,r3(k+1)为第k+1时刻的平滑参考前轮转向角,r4(k+1)为第k+1时刻的平滑参考前轮转向角一阶导数,r3(k)为第k时刻的平滑参考前轮转向角,r4(k)为第k时刻的平滑参考前轮转向角一阶导数,δfd(k)为第k时刻的参考前轮转向角,h2为第二微分跟踪器的采样周期,λ3为第二微分跟踪器中决定跟踪快慢的参数;
45、所述第二扩张状态观测器被构造为:
46、
47、式中,z4为实际前轮转向角估计值,z5为实际前轮转向角一阶导数估计值,z6为未建模动态及未知多源扰动的估计值,e02为实际前轮转向角估计误差,β04,β05,β06,α03,α04,κ2均为第二扩张状态观测器参数;
48、所述第二非线性反馈控制律的数学方程为:
49、u2=β3fal(e3,α3,λ4)+β4fal(e4,α4,λ4)+b2z6
50、式中,e3为实际前轮转向角跟踪误差且e3=r3-z4,e4为实际前轮转向角一阶导数跟踪误差且e4=r4-z5,β3,β4,α3,α4,λ4均为第二非线性反馈控制律参数。
51、可选的,所述根据所述附加横摆力矩、所述差动力矩和所述车辆所需纵向驱动力,基于轮胎负荷率最优的转矩分配方法确定每个车轮转矩,包括:
52、根据所述附加横摆力矩、所述差动力矩和所述车辆所需纵向驱动力,基于车辆驱制动电机的最大输出转矩和路面附着条件,构建车辆纵向力约束目标函数;
53、采用有效集方法对所述电动汽车纵向力约束目标函数进行求解,确定所述车辆的每个车轮的当前转矩。
54、可选的,所述车辆纵向力约束目标函数的具体公式为:
55、
56、约束条件为:
57、
58、其中,fxeq为所述车辆所需纵向驱动力,fxfl,fxrl,fxfr,fxrr分别为车辆左前轮、左后轮、右前轮、右后轮的纵向力,fzfl,fzrl,fzfr,fzrr分别为车辆左前轮、左后轮、右前轮、右后轮的垂向力,μ为路面附着系数,lw为车辆轮距,rw为轮胎等效半径,tmax为所述车辆驱制动电机的最大输出转矩,rσ为主销偏移距,τ为主销后倾角,σ为主销内倾角,cij用于调整车轮纵向力在优化目标函数中的权重系数。
59、为达上述目的,本技术第二方面实施例提出了一种基于自抗扰的差动转向容错控制系统,包括:
60、第一获取模块,用于获取车辆参考横摆角、实际横摆角、参考前轮转向角和实际前轮转向角;
61、横摆角控制模块,用于根据车辆的所述参考横摆角和所述实际横摆角,采用自抗扰横摆角控制方法,得到附加横摆力矩;
62、转向角控制模块,用于根据车辆的所述参考前轮转向角和所述实际前轮转向角,采用自抗扰转向角控制方法,得到差动力矩;
63、第二获取模块,用于获取车辆所需纵向驱动力;
64、车轮转矩分配模块,用于根据所述附加横摆力矩、所述差动力矩和所述车辆所需纵向驱动力,基于轮胎负荷率最优的转矩分配方法确定每个车轮转矩;
65、驱动模块,用于根据所述每个车轮转矩控制车辆实现横向运动。
66、本技术的实施例提供的技术方案至少带来以下有益效果:
67、第一,本技术提供的一种基于自抗扰的差动转向容错控制方法及系统,采用自抗扰控制方法,不仅保证了参考信号的平滑性和控制输出的平稳性,提高了系统的动态性能,而且通过实时估计和补偿系统的总扰动,能够有效应对模型不确定和未知多源扰动,降低对系统模型依赖,提高系统的鲁棒性;
68、第二,本技术提供的一种基于自抗扰的差动转向容错控制方法及系统,通过两个并行的自抗扰控制器分别对横摆角和转向角进行控制,实现了二者的解耦,能够有效降低控制系统的维度,结构简单,易于实现,拓宽了自抗扰控制的应用范围。
69、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334520.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表