一种煤矿辅助运输转载机器人的制动能量回收液压系统
- 国知局
- 2024-11-21 12:12:46
本发明属于能量回收,尤其涉及一种煤矿辅助运输转载机器人的制动能量回收液压系统。
背景技术:
1、煤矿运输辅助转载机器人在煤矿运输中有着广泛的应用,为了保证运输过程中人员以及货物的安全性,其在制动时的响应速度以及稳定性便尤为重要。
2、传统的煤矿运输辅助转载机器人由于其制动力是由制动弹簧提供的,所以在其正常工作期间,即无需制动时,由液压泵持续工作为制动液压缸提供压力,以此抵消制动弹簧制动力,在此期间,保证液压泵长时间持续稳定工作,大大增加了系统能量消耗,降低了设备的能量利用率。
3、在制动时,通过对制动液压缸的卸荷,液压油直接经过回油路进入油缸,这一过程中不仅由于压力的突变,会产生较大的冲击以及噪音,继而对整个系统的稳定性产生影响,若冲击力过大,甚至会影响设备的使用寿命,而且此制动过程中制动弹簧提供的制动能转化成热能以及液压势能,全部损失,造成了大量能量的浪费,为了解决上述的问题,亟待需要一种煤矿辅助运输转载机器人的制动能量回收液压系统。
技术实现思路
1、本发明的目的在于:为了解决在制动时,通过对制动液压缸的卸荷,液压油直接经过回油路进入油缸,这一过程中不仅由于压力的突变,会产生较大的冲击以及噪音,继而对整个系统的稳定性产生影响,若冲击力过大,甚至会影响设备的使用寿命,而且此制动过程中制动弹簧提供的制动能转化成热能以及液压势能,全部损失,造成了大量能量的浪费的问题,而提出的一种煤矿辅助运输转载机器人的制动能量回收液压系统。
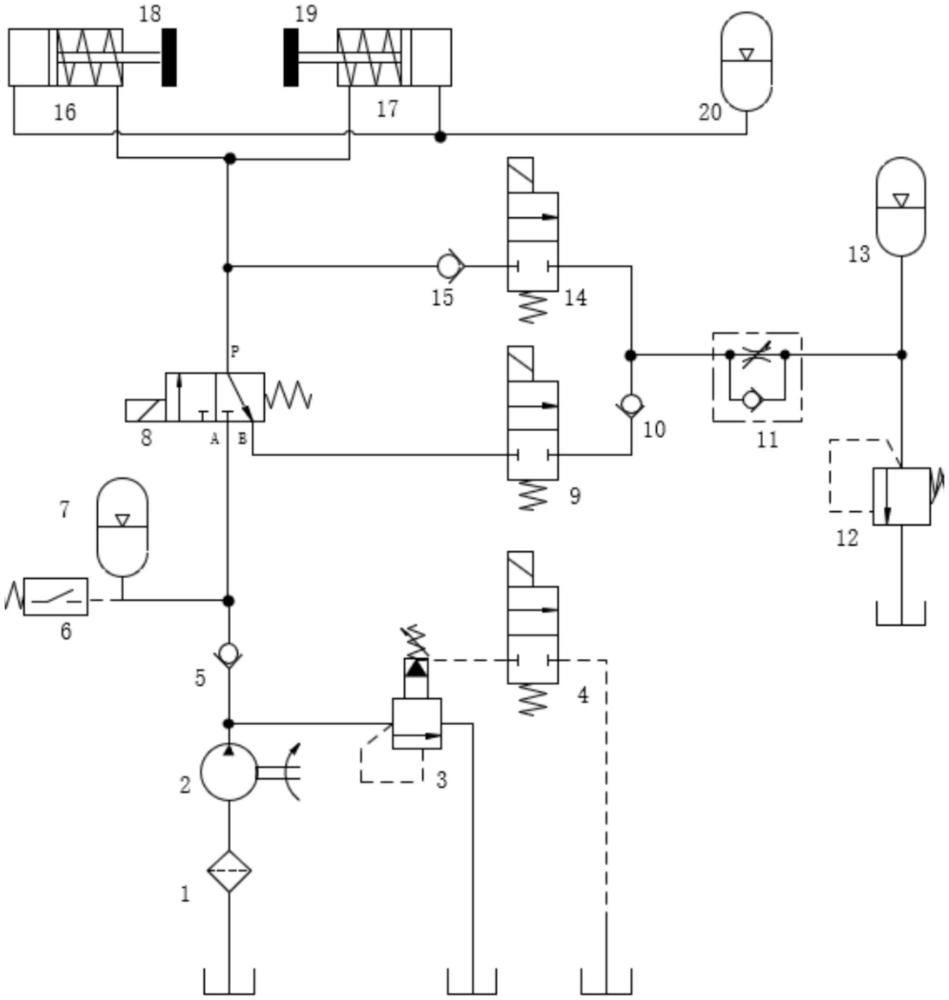
2、为了实现上述目的,本发明采用了如下技术方案:一种煤矿辅助运输转载机器人的制动能量回收液压系统,包括蓄能器与液压泵,所述液压泵的进油口依次与蓄能器和油缸连接,其出油口分别与先导式溢流阀进一侧设置的油口与第一单向阀一侧设置的进油口连接,所述先导式溢流阀上设置的先导阀口通过第一电磁换向阀与油缸连接,所述第一单向阀的出油口分别与第一蓄能器、压力继电器及二位三通电磁换向阀的a口连接,所述二位三通电磁换向阀的p口分别与第一制动液压缸和第二制动液压缸的有杆腔连接。
3、作为上述技术方案的进一步描述:
4、所述二位三通电磁换向阀的b口依次与第二电磁换向阀、第二单向阀、单向节流阀与第二蓄能器连接,所述单向节流阀的进油口依次与第三电磁换向阀、第三单向阀、第一制动液压缸与第二制动液压缸的有杆腔连接,所述单向节流阀的出油口分别与第二蓄能器及溢流阀的进油口连接,所述溢流阀的出油口与油缸连接。
5、作为上述技术方案的进一步描述:
6、所述第一电磁换向阀、第二电磁换向阀与第三电磁换向阀均为二位二通电磁换向阀。
7、作为上述技术方案的进一步描述:
8、所述第二蓄能器依次与单向节流阀、第三电磁换向阀、第三单向阀、第一制动液压缸与第二制动液压缸的有杆腔连接。
9、作为上述技术方案的进一步描述:
10、所述第一制动液压缸与第二制动液压缸的有杆腔依次与二位三通电磁换向阀、第二电磁换向阀、第二单向阀、单向节流阀与第二蓄能器连接,其无杆腔与第三蓄能器连接。
11、本文还公开了一种煤矿辅助运输转载机器人的制动能量回收方法,具体包括如下步骤:
12、s1、在正常行驶过程中,由于制动力是由弹簧提供的压力,所以需要液压缸提供压力,抵消弹簧力,即二位三通电磁换向阀保持左位工作,油液经蓄能器,进入液压泵,继而经过第一单向阀,二位三通电磁换向阀进入第一制动液压缸与第二制动液压缸的有杆腔,抵消弹簧提供的制动力,使第一制动闸瓦与第二制动闸瓦脱离摩擦面,第一制动液压缸与第二制动液压缸中无杆腔油液进入第三蓄能器进行存储,车辆正常行驶;
13、s2、在重载下坡时,二位三通电磁换向阀右位工作,第二电磁换向阀工作,单向节流阀中的可调节流阀开口大小根据负载实时变化,调节进入第二蓄能器的油液流量,继而可以间接控制两制动液压缸有杆腔内压力大小,实现对制动力的控制,使车辆整体可实现在制动中缓慢下行;
14、s3、当遇到紧急情况时,二位三通电磁换向阀右位工作,第二电磁换向阀工作,单向节流阀的可调节流阀开口全开,使得第一制动液压缸与第二制动液压缸迅速卸荷,第一制动闸瓦与第二制动闸瓦迅速夹紧,从而实现紧急制动;
15、s4、当车辆恢复正常行驶时,第二电磁换向阀停止工作,第三电磁换向阀工作,单向节流阀中的节流阀不工作,第二蓄能器中油液经单向节流阀中单向阀,第三电磁换向阀,第三单向阀,进入第一制动液压缸与第二制动液压缸中有杆腔,实现制动能量再次利用,其无杆腔内油液被压入第三蓄能器中存储。
16、作为上述技术方案的进一步描述:
17、所述s1中,在正常行驶过程中,由于制动力是由弹簧提供的压力,所以需要液压缸提供压力,抵消弹簧力,即二位三通电磁换向阀保持左位工作,油液经蓄能器,进入液压泵,继而经过第一单向阀,二位三通电磁换向阀进入第一制动液压缸与第二制动液压缸的有杆腔,抵消弹簧提供的制动力,使第一制动闸瓦与第二制动闸瓦脱离摩擦面,第一制动液压缸与第二制动液压缸中无杆腔油液进入第三蓄能器进行存储,车辆正常行驶;当主进油路压力达到压力继电器调定值时,压力继电器发出信号使第一电磁换向阀工作,液压泵卸荷,第一制动液压缸与第二制动液压缸则由第一蓄能器保压;缸压不足时,压力继电器复位使液压泵重新工作,为系统补偿压力,确保系统稳定工作。
18、作为上述技术方案的进一步描述:
19、所述s2中,在重载下坡时,二位三通电磁换向阀右位工作,第二电磁换向阀工作,单向节流阀中的可调节流阀开口大小根据负载实时变化,调节进入第二蓄能器的油液流量,继而可以间接控制两制动液压缸有杆腔内压力大小,实现对制动力的控制,使车辆整体可实现在制动中缓慢下行;在此过程中,第三蓄能器在正常运行时存储的油液被吸入第一制动液压缸与第二制动液压缸中无杆腔。
20、作为上述技术方案的进一步描述:
21、所述s3中,当遇到紧急情况时,二位三通电磁换向阀右位工作,第二电磁换向阀工作,单向节流阀的可调节流阀开口全开,使得第一制动液压缸与第二制动液压缸迅速卸荷,第一制动闸瓦与第二制动闸瓦迅速夹紧,从而实现紧急制动,在上述两种制动过程中,油液进入第二蓄能器中,实现制动能量回收,溢流阀在能量回收支路中起到保护蓄能器正常工作,以及维护系统稳定运行的作用。
22、作为上述技术方案的进一步描述:
23、所述s4中,当车辆恢复正常行驶时,第二电磁换向阀停止工作,第三电磁换向阀工作,单向节流阀中的节流阀不工作,第二蓄能器中油液经单向节流阀中单向阀,第三电磁换向阀,第三单向阀,进入第一制动液压缸与第二制动液压缸中有杆腔,实现制动能量再次利用,其无杆腔内油液被压入第三蓄能器中存储;由于正常工作时,二位三通电磁换向阀左位工作,若在上述过程中出现油液泄漏等情况,液压泵会恢复工作直至补压完成,压力继电器发出信号使第一电磁换向阀工作,液压泵卸荷,第一蓄能器保压,此时,整个液压系统由双蓄能器实现保压,抵消弹簧产生的制动力,使车辆正常行驶。
24、综上所述,由于采用了上述技术方案,本发明的有益效果是:
25、1、本发明采用多蓄能器结构。在主进油路上,即液压泵与制动液压缸连接油路上,使用的第一蓄能器可在压力继电器发出信号后,对制动液压缸实现保压,大大减少泵的能量消耗,而且还可以吸收泵启停与二位三通电磁换向阀变换引起的冲击;在制动能量回收支路,即第一制动液压缸和第二制动液压缸的有杆腔经二位三通电磁换向阀右位,第二电磁换向阀,第二单向阀,单向节流阀与第二蓄能器连接的油路,第二蓄能器可实现制动能量的回收再利用,大大减少了能量的流失;第三蓄能器与第一制动液压缸和第二制动液压缸无杆腔连接,可依据两制动液压缸有杆腔压力大小的变化存储与释放无杆腔内油液,继而达到缓冲压力的作用。
26、2、本发明在制动能量回收支路中采用的单向节流阀,一方面,可以根据煤矿辅助运输转载机器人负载的变化,实时调节可调节流阀的阀口开闭大小控制油液进入第二蓄能器的流速,间接控制制动液压缸有杆腔压力,可实现长时间制动以及紧急制动的工况;另一方面,第二蓄能器在释放能量时,油液无需经过可调节流阀,迅速进入制动液压缸有杆腔,使其停止制动,这大大提高了系统的响应速度。其后加入的溢流阀可起到保护第二蓄能器以及制动能量回收支路的稳定工作的作用。
27、3、本发明在煤矿辅助运输转载机器人正常运行,即无需制动或停止制动时,双蓄能器可同时工作,为制动液压缸提供压力,抵消弹簧产生的制动,使制动闸瓦不工作;若此过程中压力不足时,压力继电器发出信号使液压泵工作,为系统补压,在保证煤矿辅助运输转载机器人的稳定运行。
28、综上所述,相较于传统的煤矿辅助运输转载机器人制动液压系统,本发明的液压系统的能量利用率,设备利用率,系统的响应速度都得到了一定改善,并且双蓄能器结构不仅可以实现保压与能量回收再利用的作用,还可以吸收系统中产生的冲击,降低噪音的效果,使系统更加安全可靠,迅速稳定的运行。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334885.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。