一种基于三维点云修复模型的3D打印方法及装置与流程
- 国知局
- 2024-11-21 12:17:11
本申请涉及slm铸造,尤其涉及一种基于三维点云修复模型的3d打印方法及装置。
背景技术:
1、现有技术中,选区激光熔融技术(即,slm)被广泛应用于金属铸件的3d打印。所述slm通过按照铸件的结构特征逐层铺设金属粉末,通过激光束对选定区域的金属粉末进行熔融,经过冷凝成型以及逐层堆叠进行三维铸件的制造。slm由于具备对复杂、微细结构的一体化成形能力,被广泛的运用在航空航天、医疗器械及其植入体、模具和汽车等领域。
2、现有的slm打印装置所用的扫描仪为了获取高分辨率的点云数据,通常需要搭载结构光摄像头和激光雷达,硬件价格昂贵,而且扫描时间长。
3、然而,在低端3d打印设备中,搭载的扫描仪只能获取低分辨率的点云数据,打印后的铸件需要切割掉打印错误的部分。
4、对于低分辨率的点云数据,可以通过将点云数据重建为体素数据来提高打印精度。因此,通过现有的低分辨率点云数据构建高分辨率的体素数据作为一种有效方法被广泛引用。
5、然而,体素转换还存在对计算设备算力要求高的缺点,为了加快3d打印铸件的体素数据生成速度和精度,本申请提供一种基于三维点云修复模型的3d打印方法。
技术实现思路
1、为克服相关技术中存在的问题,本申请第一方面提供一种基于三维点云修复模型的3d打印方法,包括:
2、s1、扫描原始铸件,得到原始点云数据;
3、s2、对所述原始点云数据进行处理,得到三维打印数据;
4、s3、根据所述三维打印数据进行slm打印;
5、其中,对所述原始点云数据进行处理,得到三维打印数据,具体包括:
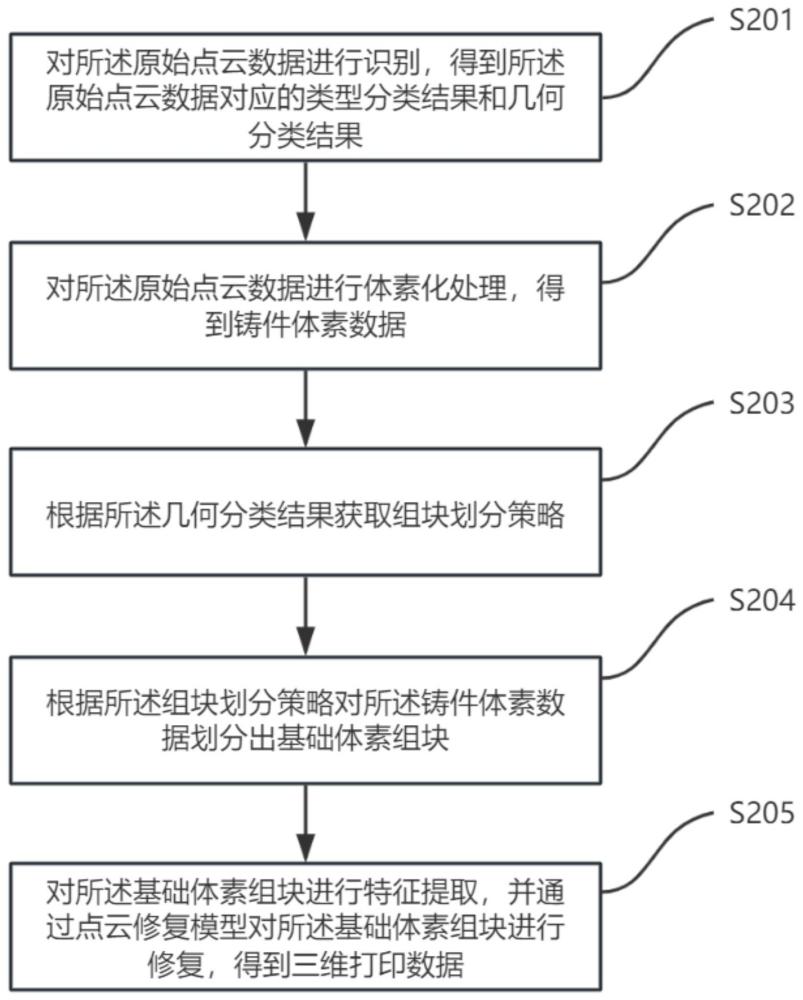
6、s201、对所述原始点云数据进行识别,得到所述原始点云数据对应的类型分类结果和几何分类结果;
7、s202、对所述原始点云数据进行体素化处理,得到铸件体素数据;
8、s203、根据所述几何分类结果获取组块划分策略;
9、所述组块划分策略包括:轴对称划分、旋转对称划分、螺旋对称划分以及平移对称划分;
10、s204、根据所述组块划分策略对所述铸件体素数据划分出基础体素组块;所述基础体素组块为组成所述铸件体素数据的最小单元;
11、s205、对所述基础体素组块进行特征提取,并通过点云修复模型对所述基础体素组块进行修复,得到三维打印数据。
12、在一种实施方式中,在s201之前,还包括:对所述原始点云数据进行格式转换。
13、在一种实施方式中,s201具体包括:
14、基于点云识别模型对所述原始点云数据进行识别,输出所述原始点云数据的类型分类结果和几何分类结果,所述点云识别模型为通过点云数据集预训练的神经网络模型。
15、在一种实施方式中,s202具体包括:
16、s301、定义体素尺寸;
17、s302、创建体素网格;
18、s303、填充体素网格。
19、在一种实施方式中,s205具体包括:
20、s401、通过编码器提取所述基础体素组块的轮廓特征;所述轮廓特征包括所述基础体素组块的六个视图方向上的轮廓特征编码;
21、s402、将六个视图方向上的轮廓特征编码输入所述点云修复模型进行轮廓修正;
22、s403、通过解码器生成修复后的所述基础体素组块;
23、s404、将所述基础体素组块转换为三维打印数据。
24、在一种实施方式中,在s205之前,还包括:
25、s501、获取铸件体素训练集;
26、s502、构建点云修复模型,并定义融合损失函数;所述融合损失函数包括轮廓损失函数和语义损失函数;
27、s503、配置训练参数;
28、s504、将所述铸件体素训练集输入所述点云修复模型进行梯度训练。
29、在一种实施方式中,所述融合损失函数为:
30、
31、其中,为所述轮廓损失函数,为所述语义损失函数,为所述融合损失函数,为调整权重;
32、在一种实施方式中,所述轮廓损失函数为:
33、
34、其中,为欧式距离,为修正后的第i个视图方向的轮廓特征向量,为第i个视图方向上的轮廓真实标签,。
35、在一种实施方式中,所述语义损失函数为:
36、
37、为所述三维打印数据属于当前分类结果的概率,c为分类结果总数。
38、本申请第二方面提供一种基于三维点云修复模型的3d打印装置,包括:扫描单元、点云处理单元以及铸件打印单元;
39、所述扫描单元用于扫描原始铸件,得到原始点云数据;所述点云处理单元用于对所述原始点云数据进行处理,得到三维打印数据;所述铸件打印单元用于根据所述三维打印数据进行slm打印。
40、本申请提供的技术方案可以包括以下有益效果:
41、本申请在通过点云识别模型识别原工件的几何特征后,将铸件划分为由基础体素组块拼接成的体素数据,只对所述基础体素组块进行修复,再根据几何分类结果将修复后的基础体素组块拼接成铸件体素数据,能够降低处理铸件体素数据对硬件的算力要求。
42、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:1.一种基于三维点云修复模型的3d打印方法,其特征在于,包括:
2.根据权利要求1所述的一种基于三维点云修复模型的3d打印方法,其特征在于,在s201之前,还包括:
3.根据权利要求1所述的一种基于三维点云修复模型的3d打印方法,其特征在于,s201具体包括:
4.根据权利要求1所述的一种基于三维点云修复模型的3d打印方法,其特征在于,s202具体包括:
5.根据权利要求1所述的一种基于三维点云修复模型的3d打印方法,其特征在于,s205具体包括:
6.根据权利要求5所述的一种基于三维点云修复模型的3d打印方法,其特征在于,在s205之前,还包括:
7.根据权利要求6所述的一种基于三维点云修复模型的3d打印方法,其特征在于,所述融合损失函数为:
8.根据权利要求7所述的一种基于三维点云修复模型的3d打印方法,其特征在于,所述轮廓损失函数为:
9.根据权利要求7所述的一种基于三维点云修复模型的3d打印方法,其特征在于,所述语义损失函数为:
10.一种基于三维点云修复模型的3d打印装置,其特征在于,用于执行权利要求1至9任一项所述的3d打印方法,包括:扫描单元、点云处理单元以及铸件打印单元;
技术总结本申请是一种基于三维点云修复模型的3D打印方法及装置,包括:S1、扫描原始铸件,得到原始点云数据;S2、对所述原始点云数据进行处理,得到三维打印数据;S3、根据所述三维打印数据进行SLM打印。其中,本申请在S2步骤能够将低分辨率的原始点云数据生成为高精度的三维打印数据。同时,再通过模型识别原工件的几何特征,将铸件划分为由基础体素组块拼接成的体素数据,只对所述基础体素组块进行修复,再根据几何分类结果将修复后的基础体素组块拼接成铸件体素数据,能够降低处理铸件体素数据对硬件的算力要求。技术研发人员:吕忠利,张树哲,苏楠,蔡连欣,吕广明,李博岩受保护的技术使用者:山东创瑞激光科技有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/335101.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表