智能垃圾混装混运判断方法与流程
- 国知局
- 2024-11-21 12:18:12
本申请涉及垃圾处理,具体涉及一种智能垃圾混装混运判断方法。
背景技术:
1、随着城市化进程的加速,城市垃圾处理问题日益凸显,成为城市管理中的一大挑战。传统的垃圾处理方式主要依赖人工分拣,不仅效率低下,而且难以满足日益增长的垃圾处理需求。为了提高垃圾处理的效率和准确性,一般城市采用了分类垃圾桶的策略,即:为居民提供不同的分类垃圾桶,每一种垃圾桶对应装载对应类型的垃圾,之后由垃圾转运车将垃圾桶内的垃圾按照其分类进行分装并带走。
2、但是,在实际操作中经常遇到垃圾混装混运的乱象。
技术实现思路
1、有鉴于此,本申请的实施例致力于提供一种智能垃圾混装混运判断方法,以尽量减少垃圾混装混运的乱象。
2、本申请提供了一种智能垃圾混装混运判断方法,包括:
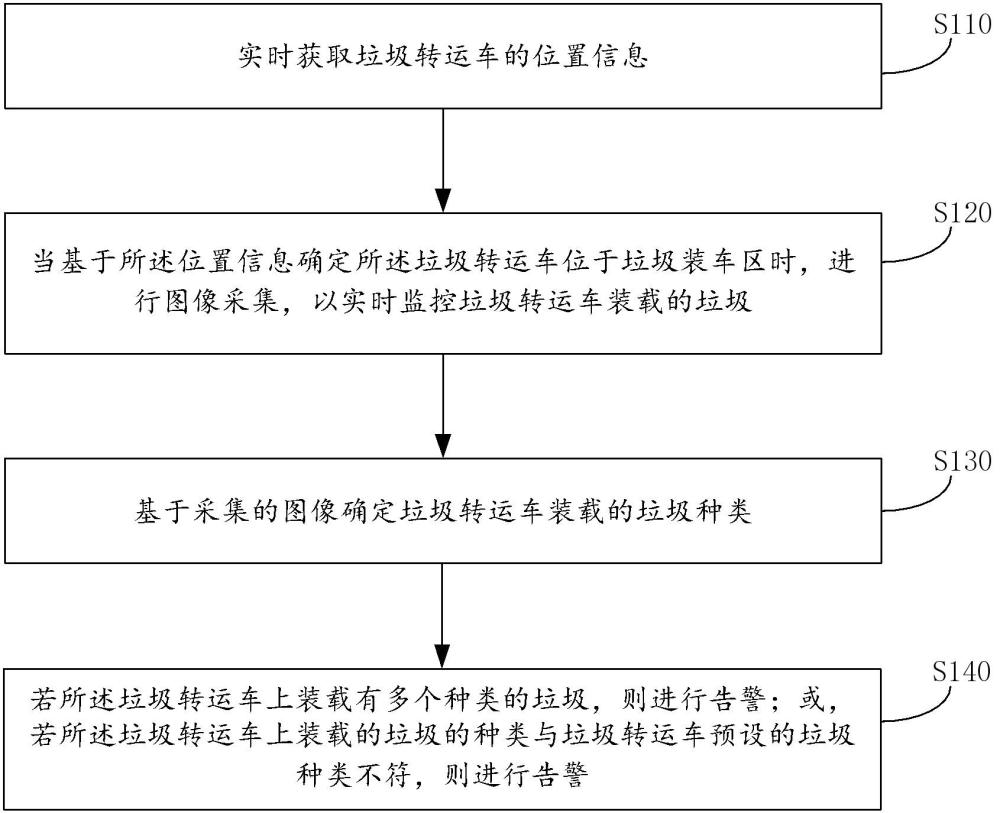
3、实时获取垃圾转运车的位置信息;
4、当基于所述位置信息确定所述垃圾转运车位于垃圾装车区时,进行图像采集,以实时监控垃圾转运车装载的垃圾;
5、基于采集的图像确定垃圾转运车装载的垃圾种类:
6、若所述垃圾转运车上装载有多个种类的垃圾,则进行告警;或,若所述垃圾转运车上装载的垃圾的种类与垃圾转运车预设的垃圾种类不符,则进行告警;
7、垃圾转运车上设置有预设的定位模块,所述定位模块用于实时上报自身的位置信息;
8、所述实时获取垃圾转运车的位置信息包括:
9、实时接收所述定位模块上报的自身位置信息;
10、每间隔预设时长,基于所述位置信息,确定所述垃圾转运车与垃圾装车区的位置关系;
11、所述垃圾转运车上设置有摄像装置:
12、所述进行图像采集包括:
13、控制所述摄像装置开始拍摄并发送拍摄视频;
14、接收拍摄视频;
15、所述摄像装置进行拍摄,得到初始视频;所述摄像装置基于opencv软件库对所述初始视频,以预设时长为间隔进行抽帧,得到拍摄视频,基于rtsp协议发送由抽出的帧组成的拍摄视频;或者,
16、所述摄像装置进行拍摄,得到初始视频,将初始视频作为拍摄视频进行发送,相对应的,所述接收拍摄视频之后还包括:基于opencv软件库对所述拍摄视频,以预设时长为间隔进行抽帧,得到由抽出的帧组成的拍摄视频;
17、其中,由抽出的帧组成的拍摄视频,为所述采集的图像;
18、所述基于采集的图像确定垃圾转运车装载的垃圾种类,包括:
19、基于采集的图像,确定目标垃圾桶,其中,目标垃圾桶为桶内垃圾被垃圾转运车装载的垃圾桶;
20、基于目标垃圾桶的颜色确定装载的垃圾种类;
21、所述基于采集的图像,确定目标垃圾桶,包括:
22、针对出现在图片中的每一个垃圾桶,基于采集的图片,确定垃圾桶的移动轨迹;
23、基于所述垃圾桶的移动轨迹,确定所述垃圾桶内的垃圾是否被装载,桶内垃圾被垃圾转运车装载的垃圾桶为目标垃圾桶;
24、所述基于采集的图片,确定垃圾桶的移动轨迹,包括:
25、基于当前的图片,确定所述垃圾桶的当前位置;
26、比对所述垃圾桶的同色垃圾桶的历史位置;其中历史位置,为最近的历史图片中,各个垃圾桶的位置信息;
27、基于比对结果,更新垃圾桶的移动轨迹,或添加垃圾桶的移动轨迹;
28、所述基于比对结果,更新垃圾桶的移动轨迹,或添加垃圾桶的移动轨迹,包括:
29、若所述当前位置与任一同色垃圾桶的历史位置,大于第一预设距离,则,认为所述垃圾桶为新出现垃圾桶,添加所述垃圾桶对应的移动轨迹;
30、若存在一同色垃圾桶的历史位置与所述当前位置,小于第二预设距离,则,认为所述垃圾桶为历史位置最接近当前位置的同色垃圾桶移动后的影像,更新垃圾桶的移动轨迹;
31、所述基于所述垃圾桶的移动轨迹,确定所述垃圾桶内的垃圾是否被装载,包括:
32、若基于所述垃圾桶的移动轨迹,确定所述垃圾桶的移动次数大于预设次数,或,所述移动轨迹为靠近所述垃圾转运车,之后又离开所述垃圾转运车则确定所述垃圾桶内的垃圾被装载。
33、本申请所提供的智能垃圾混装混运判断方法,实时获取垃圾转运车的位置信息;当基于所述位置信息确定所述垃圾转运车位于垃圾装车区时,进行图像采集,以实时监控垃圾转运车装载的垃圾;基于采集的图像确定垃圾转运车装载的垃圾种类:基于垃圾桶的颜色确定装载的垃圾种类;基于所述垃圾桶的移动轨迹,确定所述垃圾桶内的垃圾是否被装载;若所述垃圾转运车上装载有多个种类的垃圾,则进行告警。如此设置本申请提供的方案可以对垃圾转运车进行实时监控,对垃圾转运车上装载的垃圾进行实时监控,一旦发现存在混装混运现象则进行告警,以尽量减少混装混运现象,
技术特征:1.一种智能垃圾混装混运判断方法,其特征在于,包括:
技术总结本申请涉及垃圾处理技术领域,具体涉及一种智能垃圾混装混运判断方法。其中,方法包括:实时获取垃圾转运车的位置信息;当基于所述位置信息确定所述垃圾转运车位于垃圾装车区时,进行图像采集,以实时监控垃圾转运车装载的垃圾;基于采集的图像确定垃圾转运车装载的垃圾种类:基于垃圾桶的颜色确定装载的垃圾种类;基于所述垃圾桶的移动轨迹,确定所述垃圾桶内的垃圾是否被装载,若所述垃圾转运车上装载有多个种类的垃圾,则进行告警;或,若所述垃圾转运车上装载的垃圾的种类与垃圾转运车预设的垃圾种类不符,则进行告警。如此,通过告警尽量减少垃圾混装混运的乱象。技术研发人员:刘会永,石鲲,刘书艳,王小冬受保护的技术使用者:北京慧萌信安软件技术有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/335117.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表