1.本发明涉及管道内检测技术,特别涉及基于一种适用于油气管道内检测器与清管器的跟踪定位技术。
背景技术:
2.油气管道完整性是关乎油气运输安全的重要因素,管道公司对此非常关注,由于管道腐蚀或打孔盗油等破坏方式,造成管道完整性失效,将导致重大经济损失、环境、社会影响;因此需定期对管道进行检测,以发现管道腐蚀、变形、泄漏等失效情况。
3.在进行油气管道中运行的管道内检测器或者清管器可能会出现卡堵情况,进而造成管道企业生产安全事故。因此,每次投运道内检测器或清管器时,掌握内检测器的运行状态、运行位置十分重要。
4.目前,一般使用的检测器或清管球跟踪定位技术有低频电磁波法、磁信号检测法及人工跟球法;
5.由于钢质管道对电磁信号具有屏蔽效应,高频电磁波无法穿透管壁,需采用极低频率的电磁信号才能穿透管壁,低频电磁波法需清管器或检测器上激励低频电磁信号,穿透管道,在管道监测点布置低频信号接收机,当球通过监测点时,接收机采集到低频电磁信号,可判断球通过此处;低频信号易受环境影响,容易产生误判信号;
6.磁信号检测方法需要球带有强磁体,通过监测点时,信号接收机检测到磁信号,可判断球通过监测点,需要球具备强磁体,并且受管道埋地深度影响,易漏检及误判。
7.申请人2021年公开了一种管道内检测的实时追踪定位系统和方法202110081040.3,为掌握内检测器的运行状态与运行位置,将次声波发声器置于内检测器中,信号采集器设置在管道两端的收发球设备处,监控终端通过收发次声波信号的时间差来判断内检测器位置,通过时间差是否变化来判断是否出现卡堵。这种方式只能针对一段管道进行跟踪,难以适用于长距离且线路复杂的油气管道场景。
8.申请号为202010704898.6的专利申请公开了一种埋地压力管道内检测智能跟球监测桩及监测器,通过监测桩上设有的传感器模块,传感器模块使用20hz-10khz带宽范围内振动采集功能;传感器模块采集监测桩下方压力管道内的清管器/测径球/检测球在压力管道行走时与管壁摩擦、碰撞形成振动源;监测桩监测地下振动源波幅强弱来判断振动源通过跟球点并将采集到的数据发送给监测器进行监测。但实际场景中检测到的振动信号可能并不是过球信号。该方案提出在传感器模块结构上采取防护措施来减少空气中声音对传感器模块的干扰,但这仍然不能防止地面或者地下其他振动的干扰,容易出现误判。
技术实现要素:
9.本发明所要解决的技术问题是,提供一种油气管道内检测器与清管器的跟踪定位时能减少干扰的提高声源判断准确度的系统。
10.本发明为解决上述技术问题所采用的技术方案是,一种适用于油气管道内检测器
与清管器的跟踪定位系统,包括由若干监测器,每一个监测器连接至少一个上游探头和至少一个下游探头;
11.一个监测器对应一个管道检测点;
12.上游探头、下游探头分别设置在目标经过对应管道检测点的上、下游位置,采用振动传感器接收声源信号;所述目标为内检测器或清管器;
13.每一个监测器用于接收与其相连的上、下游探头的声源信号;当监测到目标先后经过对应的管道检测点的上、下游位置,判定目标到达该管道检测点,更新目标位置;
14.当上游探头与下游探头接收的声源信号均持续增强且上游探头的声源信号达到最大值时,则判断目标经过对应的管道检测点的上游位置;当上游探头接收的声源信号持续减弱,下游探头接收的声源信号持续增强且达到最大值时,判断目标经过对应的管道检测点的下游位置。
15.本发明在一处管道检测点使用至少两个以上振动传感器,并设置在管道检测点上、下游位置,追踪内检测器或清管器经过上、下游位置不同的变化趋势信号形成的组合来判断是否出现过球信号,相比单探头更加准确,防止对过球信号的误判,从而提供更好的跟踪定位服务。
16.进一步的,采用本发明系统能够通过记录的目标经过管道检测点上、下游位置的时间以及上、下游探头的距离计算目标经过管道检测点的瞬时速度,通过该瞬时速度能更好的描述目标在管道内的状态,同时结合目标到达上一检测点位置(也可以是任一已经到达的检测点位置)信息及时间信息、当前瞬时速度进一步更新目标在管道中的实时位置,还可以通过判断该瞬时速度是否在过球速度的合理范围内来进一步筛选过球信号,防止误判。
17.进一步的,采用本发明系统能够通过记录的目标经过两个管道检测点中间位置的时间以及两管道检测点的距离计算目标经过两管道检测点之间的平均速度来反映这段路程的目标状态,还可结合目标到达上一检测点位置(也可以是任一已经到达的检测点位置)信息及时间信息、当前平均速度进一步更新目标在管道中的实时位置。
18.本发明的有益效果是,能更精准地实现检测器或清管器的跟踪定位,通过计算瞬时速度与平均速度完善运行状态监控,准确判断检测器或清管器是否卡堵并定位。
附图说明
19.图1为监测器组成示意图;
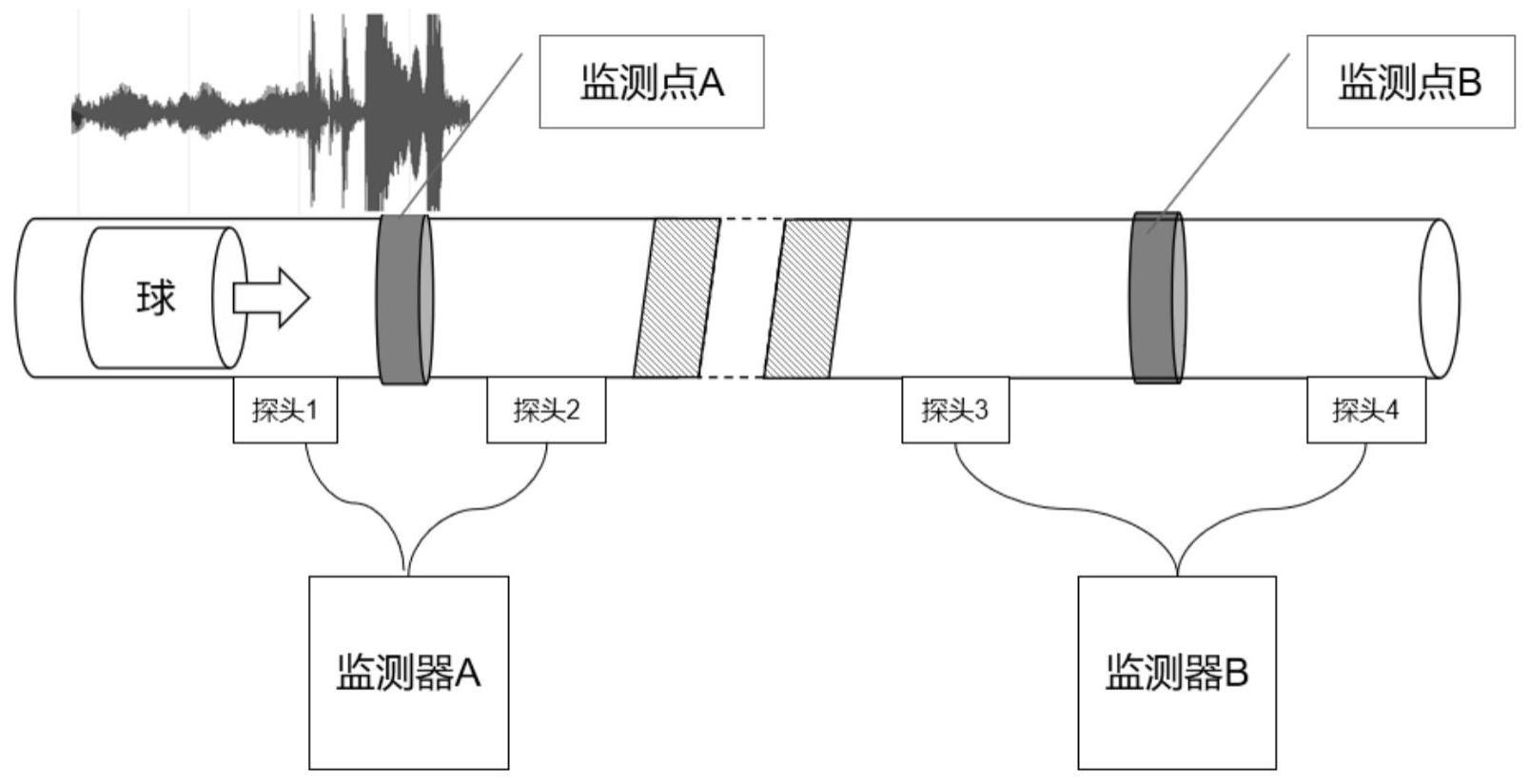
20.图2为实施例应用场景示意图。
具体实施方式
21.如图1所示实施例系统包括监测器、上游探头1、下游探头2与终端。终端为pc终端和/或与移动终端。
22.监测器包括存储器、处理器、gps模块、4g通信模块和电池;电池为监测器内部其他模块提供电源,处理器分别与存储器、全球定位系统gps模块、4g通信模块、lora模块相连。
23.其中,gps模块属于卫星通信模块的一种可替换类型,也可选择其他如北斗等其他卫星通信。在监测器中设置卫星定位模块,即可利用管道检测点对应的监测器的卫星定位
信息来更新目标位置。更进一步的,还可利用声源信号更新的目标位置目标内检测器内的惯性导航数据。
24.4g通信模块与lora模块均属于无线通信模块,4g通信模块为移动通信模块的一种可替换类型,lora模块为低功耗广域网lpwan通信模块的一种可替换类型。可选的,无线通信模块可包括移动通信模块、低功耗广域网lpwan通信模块和/或卫星通信模块。移动通信模块通过移动运营商网络实现监测器间的相互通信以及与系统内的终端的通信。如图1中,4g通信模块通过移动通信网络基站、mqtt消息服务器完成与终端的通信。同样的,4g通信模块也可以用于监测器间的通信。在移动通信网络覆盖不佳的地域,可使用低功耗广域网lpwan通信模块或卫星通信模块实现监测器间的级联传输以及与系统内的终端的通信。
25.处理器用于对来自上、下游探头的声源信号进行声源信号处理。声源信号处理包括滤波处理、目标声源识别、判定目标是否到达管道检测点并记录时间至存储器,根据经过的管道检测点位置来更新目标位置。
26.可选的,监测器的处理器与终端配合进行声源信号处理完成对目标的跟踪定位;监测器的处理器进行约定部分的声源信号处理后,通过无线通信模块将其处理结果发送至终端,由终端完成后续的声源信号处理;
27.或者,由监测器的处理器独立进行声源信号处理完成对目标的跟踪定位,仅将目标的跟踪定位结果发送至终端显示。
28.要实现本发明最基础的定位跟踪功能,监测器只需要包括存储器、处理器、通信模块和电池即可。没有卫星定位模块,管道检测点位置也可以通过其他人工的方式进行标注。监测器间可通过有线或无线方式进行通信。
29.系统在使用时,如图2所示,需要2个以上的监测器,每一个监测器连接至少一个上游探头和至少一个下游探头;一个监测器对应一个管道检测点;
30.上游探头、下游探头分别设置在目标经过对应管道检测点上方的上、下游位置,采用振动传感器接收声源信号;每一个监测器用于接收与其相连的上、下游探头的声源信号;图2中,对应监测点a设置检测器a,对应监测点b设置检测器b;监测点a连接了上游探头1、下游探头2,监测点b连接了上游探头3、下游探头4。
31.当监测到目标先后经过对应的管道检测点的上、下游位置,判定目标到达该管道检测点,更新目标位置;
32.当上游探头与下游探头接收的声源信号均持续增强且上游探头的声源信号达到最大值时,则判断目标经过对应的管道检测点的上游位置;当上游探头接收的声源信号持续减弱,下游探头接收的声源信号持续增强且达到最大值时,判断目标经过对应的管道检测点的下游位置。
33.图2中,将监测目标称为球,当球接近上游探头1时,上游探头1的信号会逐渐增强,下游探头2的信号也会逐渐增强,当球到达上游探头1时,上游探头1的信号达到最强值,此时记录时间为t1;球经过上游探头1之后,上游探头1的信号逐渐降低,下游探头2的信号继续增强,当球处于上游探头1和下游探头2之间时,上游探头1和下游探头2的信号基本相当,此时时间记录为t2;当球到达下游探头2时,下游探头2的信号达到最强,此时记录时间为t3;
34.探头1和探头2之间的距离la,可通过地面测量得到,此时可计算出球速va=la/
(t3-t1),此速度为球通过监测点a时的瞬时球速;
35.同理,当球到达监测点b时,通过探头3的时间记录为t4;在两探头中间位置记录为t5;通过探头4时记录为t6;可计算出通过监测点b的瞬时速度:vb=lb/(t6-t4);
36.球通过监测点a和b之间的平均速度可通过计算得出:v=l
ab
/(t5-t2)。
37.系统对于瞬时速度与平均速度的应用如下:
38.判断计算的目标经过管道检测点的瞬时速度是否在预设的过球速度的合理范围内,如是,则对应的声源信号属于过球信号,否则,对应的声源信号不属于过球信号出现误判,判定目标到未达该管道检测点,纠正之前更新的目标位置。
39.系统通过计算的目标经过两个管道检测点间的平均速度是否符合这两个管道检测点确定的管道段内的介质流量与压力环境来辅助判断目标运行状态。
40.进一步的,使得瞬时速度与平均速度的数据更加准确,设置一个监测器连接有一个以上的上游探头和下游探头。
41.瞬时速度的计算采用以下方式:
42.将任意一个上游探头和任意一个下游探头作为一组,利用目标经过管道检测点上、下游位置的时间以及上、下游探头的距离来计算目标经过管道检测点的瞬时速度:
[0043][0044]
其中,vi表示目标经过第i个管道检测点的速度,l
i,mn
表示第i个管道检测点处上游探头m与下游探头n的距离,t
i,n
表示目标经过第i个管道检测点下游位置的时间,t
i,m
表示目标经过第i个管道检测点上游位置的时间。
[0045]
再遍历所有上游探头和下游探头组合后,将所有组合计算出的瞬时速度进行平均,以均值作为最终的瞬时速度结果;
[0046]
可选的,按预定规则选择一个上游探头和下游探头的组合来进行瞬时速度计算。
[0047]
平均速度的计算采用以下方式:
[0048]
将一个管道检测点上任意一个上游探头和任意一个下游探头得到的目标经过对应的管道检测点的中点位置的中点时间,遍历所有上游探头和下游探头组合后,将所有组合计算出的中点时间进行平均,将均值作为目标经过这个管道检测点中点位置的最终的中点时间,再根据目标经过两个管道检测点中点位置的最终的中点时间以及这两个管道检测点之间的距离来计算目标经过两个管道检测点间的平均速度:
[0049][0050]
其中,v
ij
表示目标经过第i个管道检测点与第j个管道检测点之间的平均速度,l
ij
表示第i个管道检测点与第j个管道检测点之间的距离,t
i,mn
表示目标经过第i个管道检测点中点位置的时间,t
j,mn
表示目标经过第j个管道检测点中点位置的时间。
[0051]
可选的,按预定规则在各管道检测点上选择一个上游探头和下游探头的组合来进行平均速度计算。
[0052]
进一步的,为了提高声源信号的处理准确度,还可以进行以下优化:
[0053]
利用上、下游探头接收到的声源信号计算声源位置,并通过该声源位置是否位于油气管道三维图像的中心线位置来来进行目标声源识别,判断是否出现过球信号,防止对
过球信号的误判。更进一步的,利用声源信号计算声源位置,将声源位置处于油气管道之外的声源信号视为第三方作业信号,并对其进行监控,当达到预设的报警条件时发送报警信号,保证管道安全。
[0054]
具体的,系统对目标声源识别的具体方式为:先获取声源信号的声谱图,提取声谱图中的声纹特征输入完成训练的分类器中,由分类器输出对当前的声源信号的识别结果。声纹特征包括过零率、频谱质心、声谱衰减、均方根能量、频谱平坦度、频谱通量、基音频率、响度、尖锐度以及全局音频信号极值的归一化后的上下包络线。分类器可采用基于支持向量机的多分类器。分类器的训练数据为油气管道实际运行环境中球通过管道环焊缝、弯折管道、平直管道多种特定部位的声源信号、其他可能在周围出现的装置设备在使用时产生的声源信号以及一些危险油气管道的施工行为产生的声源信号。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
