1.本发明涉及轨道线路曲率半径测量技术领域,特别是涉及一种轨道线路曲率半径在线实时测量系统及方法。
背景技术:
2.主动控制系统在轨道车辆上的应用越来越广,轨道线路曲率半径半径的探测是大多数主动控制系统实现工程应用的难点之一。
3.目前获取车辆所处位置的轨道线路曲率半径的方式为采用地面信标或车载电子地图,这种方式对于线路固定、全程较短的地铁系统来说具有较好的适用性,但是若应用于干线铁路,采用相同定位精度所需要的硬件成本较高,后期维护难度也大,工程实施的可行性也较低。
4.有鉴于此,如何设计一种轨道线路曲率半径在线实时测量系统及方法,能够满足轨道车辆主动系统对轨道线路曲率半径实时性、准确性的要求,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
5.本发明的目的是提供一种轨道线路曲率半径在线实时测量系统及方法,该测量系统及方法基于车体姿态感知对轨道线路曲率半径进行在线实时测量,测量准确性高,能够满足以轨道线路曲率半径为参数的主动控制系统对线路曲率半径实时性、准确性的要求。
6.为解决上述技术问题,本发明提供一种轨道线路曲率半径在线实时测量系统,包括:
7.测量部件,用于测量轨道车辆的实时运行参数信息,以确定轨道车辆的车速以及被测车体的车体偏航角速度和车体偏航角加速度;
8.计算部件,用于根据所述车速、所述车体偏航角速度、所述车体偏航角加速度,以及所述被测车体的定距计算得到所述被测车体的前转向架所在位置的线路曲率半径。
9.如上所述的轨道线路曲率半径在线实时测量系统,所述计算部件用于计算所述前转向架所在位置的线路曲率半径k
f
的公式为:
10.其中,φ
′
为所述车体偏航角速度,φ
″
为所述车体偏航角加速度,v为所述车速,d为所述被测车体的定距。
11.如上所述的轨道线路曲率半径在线实时测量系统,所述测量部件包括:
12.第一测量单元,用于确定所述车体偏航角速度;
13.第二测量单元,用于确定所述车体偏航角加速度;
14.车速测量单元,用于确定所述车速。
15.如上所述的轨道线路曲率半径在线实时测量系统,所述第一测量单元包括用于测量所述车体偏航角速度的角速度传感器,所述角速度传感器安装于所述被测车体;所述第
二测量单元包括两个加速度传感器,两个所述加速度传感器分别安装于所述被测车体对应于其前转向架的位置和所述被测车体对应于其后转向架的位置;
16.所述计算部件还用于根据两个所述加速度传感器测量的加速度信号计算所述车体偏航角加速度。
17.如上所述的轨道线路曲率半径在线实时测量系统,所述角速度传感器具体安装于所述被测车体的中心位置。
18.如上所述的轨道线路曲率半径在线实时测量系统,所述车速测量单元为车载测速雷达。
19.本发明还提供一种轨道线路曲率半径在线实时测量方法,包括下述步骤:
20.s1、获取轨道车辆实时的车速以及被测车体的车体偏航角速度和车体偏航角加速度;
21.s2、根据步骤s1中获取的所述车速、所述车体偏航角速度、所述车体偏航角加速度,以及所述被测车体的定距计算得到所述被测车体的前转向架所在位置的线路曲率半径。
22.如上所述的轨道线路曲率半径在线实时测量方法,步骤s2中计算所述轨道车辆的前转向架所在位置的线路曲率半径k
f
的公式为:
23.其中,φ
′
为所述车体偏航角速度,φ
″
为所述车体偏航角加速度,v为所述车速,d为所述被测车体的定距。
24.如上所述的轨道线路曲率半径在线实时测量方法,所述车体偏航角速度通过安装于所述被测车体的角速度传感器测量获得;所述车体偏航角加速度通过安装于所述被测车体的两个加速度传感器的测量信号计算获得,两个所述加速度传感器分别安装于所述被测车体对应于其前转向架的位置和所述被测车体对应于其后转向架的位置。
25.如上所述的轨道线路曲率半径在线实时测量方法,所述车速通过车载测速雷达测量获得。
26.本发明提供的轨道线路曲率半径在线实时测量系统和方法,基于车体姿态感知来实时测量轨道线路曲率半径,因沿既定轨道行驶是轨道车辆的特点,所以轨道车辆的车体姿态会随着线路改变而发生变化,基于车体姿态变化信息可以获取线路曲率半径,具体地,该系统和方法通过轨道车辆的实时运行参数信息可以确定车速、被测车体的车体偏航角速度以及被测车体的车体偏航角加速度,被测车体的定距为已知参数,根据这些参数可以计算得到轨道车辆的被测车体的前转向架所在位置的线路曲率半径,得到该被测车体前转向架所在位置的线路曲率半径后,由于该被测车体与其他车体之间的相对位置确定,所以容易推导出其他车体转向架所在位置的实时线路曲率半径,从而指导以线路曲率半径作为参数值的主动控制系统的动作,该测量系统和方法的测量准确性高,能够满足主动控制系统对线路曲率半径实时性、准确性的要求。
附图说明
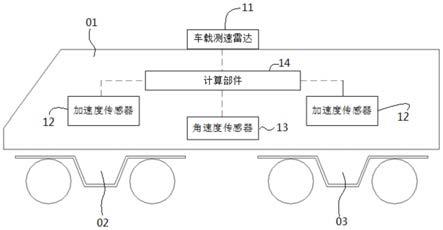
27.图1为本发明所提供轨道线路曲率半径在线实时测量系统的一种具体实施例的结构简示图;
28.图2为本发明所提供轨道线路曲率半径在线实时测量方法的一种具体实施例的流程图;
29.图3为两种轨道线路曲率半径测量方法得到的线路曲率半径曲线与实际线路曲率半径曲线的对比图。
30.附图标记说明:
31.被测车体01,前转向架02,后转向架03;
32.车载测速雷达11,加速度传感器12,角速度传感器13,计算部件14。
具体实施方式
33.为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
34.请参考图1和图2,图1为本发明所提供轨道线路曲率半径在线实时测量系统的一种具体实施例的结构简示图;图2为本发明所提供轨道线路曲率半径在线实时测量方法的一种具体实施例的流程图。
35.该实施例中,轨道线路曲率半径在线实时测量系统包括测量部件和计算部件14;其中,测量部件用于测量轨道车辆的实时运行参数信息,以确定轨道车辆的车速以及被测车体01的车体偏航角速度和车体偏航角加速度;计算部件14用于根据车速、车体偏航角速度、车体偏航角加速度,以及被测车体01的定距计算得到被测车体01的前转向架02所在位置的线路曲率半径。
36.该实施例中,轨道线路曲率半径在线实时测量方法包括下述步骤:
37.s1、获取轨道车辆实时的车速以及被测车体01的车体偏航角速度和车体偏航角加速度;
38.s2、根据步骤s1中获取的车速、车体偏航角速度、车体偏航角加速度,以及被测车体01的的定距计算得到被测车体01的前转向架02所在位置的线路曲率半径。
39.其中,被测车体01的定距指的是被测车体01的前转向架02和后转向架03之间的距离。
40.这里需要指出的是,此处的被测车体01可以是轨道车辆的任一车体,相应地,测量部件测量的也是该车体的相关运行参数,最终计算得到的是对应于该被测车体01的前转向架02所在位置的线路曲率半径。在实际应用中,通常以头车作为测量对象。
41.该轨道线路曲率半径在线实时测量系统和方法,基于车体姿态感知来实时测量轨道线路曲率半径,因沿既定轨道行驶是轨道车辆的特点,所以轨道车辆的车体姿态会随着线路改变而发生变化,基于车体姿态变化信息可以获取线路曲率半径,具体地,该系统和方法通过轨道车辆的实时运行参数信息可以确定车速、被测车体01的车体偏航角速度以及被测车体01的车体偏航角加速度,被测车体01的定距为已知参数,根据这些参数可以计算得到被测车体01的前转向架02所在位置的线路曲率半径,得到该被测车体01的前转向架02所在位置的线路曲率半径后,由于该被测车体01与其他车体之间的相对位置确定,所以容易推导出其他车体转向架所在位置的实时线路曲率半径,从而指导以线路曲率半径作为参数值的主动控制系统的动作,该测量系统和方法的测量准确性高,能够满足主动控制系统对线路曲率半径实时性、准确性的要求。
42.具体的方案中,计算部件14中和步骤s2中,用于计算前转向架02所在位置的线路曲率半径k
f
的公式为:
[0043][0044]
其中,φ
′
为被测车体01的车体偏航角速度,φ
″
为被测车体01的车体偏航角加速度,v为车速,d为被测车体01的定距。
[0045]
车辆在曲线上做圆周运动时,轨道线路曲率半径计算的传统公式为:k
f
=φ
′
/v,其中,φ
′
为车体的偏航角速度,v为车体圆周运动线速度。该公式中未考到车体定距的几何惯性滞后,实际测试中发现得到的线路曲率半径相对线路的真实曲率存在较大的误差,经过研究,本发明在该公式基础上做了修正,考虑了车辆运行姿态与线路曲率半径间的动态关系,如上面所述,能够使得计算结果更加接近真实线路曲率半径,进一步满足轨道车辆主动控制系统对线路曲率半径实时性、准确性的要求。
[0046]
具体的方案中,前述测量部件包括第一测量单元、第二测量单元和车速测量单元,其中,第一测量单元用于确定被测车体01的车体偏航角速度,第二测量单元用于确定被测车体01的车体偏航角加速度,车速测量单元用于确定车速。
[0047]
对于被测车体01的车体偏航角速度来说,可以直接测量获取,也可以通过测量相关参数后通过计算得到,该方案中,为简化结构和避免计算误差,如图1所示,第一测量单元包括角速度传感器13,安装于被测车体01,可直接测量得到反映被测车体01的车体偏航角速度的测量信号。
[0048]
具体的,角速度传感器13可安装于被测车体01的中心位置,也就是说安装在被测车体01的振动等尽量小的位置,以提高测量信号的准确度。
[0049]
对于被测车体01的车体偏航角加速度来说,目前还没有可以直接测量角加速度的测量元件,该方案中,第二测量元件包括两个加速度传感器12,如图1所示,两个加速度传感器12分半安装于被测车体01对应于其前转向架02的位置和被测车体01对应于其后转向架03的位置,通过两个加速度传感器12的测量信号来计算得到被测车体01的车体偏航角加速度;其中,计算公式为目前通用的计算公式。相应地,计算部件14还用于根据两个加速度传感器12测量的加速度信号来计算得到车体偏航角加速度。
[0050]
具体的方案中,车速测量单元可以为已有的车载测速雷达11,将其与计算部件14通信连接,避免额外增设部件,当然,设置单独的测速元件也是可以的。
[0051]
请参考图3,图3为两种轨道线路曲率半径测量方法得到的线路曲率半径曲线与实际线路曲率半径曲线的对比图。
[0052]
图3中曲线s1为应用本发明提供的方法得到的线路曲率半径,曲线s2为采用前述提及的传统算法得到的线路曲率半径,曲线s为线路的实际曲率。
[0053]
对比图中的曲线s1和s可以看出,本方法测得的线路曲率半径曲线s1和实际线路曲率半径曲线s在较为缓和的曲线段和圆曲线段基本重合,在直线和曲线的过渡区以及缓和曲线段和圆曲线段的过渡区有一定的误差,但是误差相对较小,能够满足要求。对比图中的曲线s2和s可以看出,传统算法得到的线路曲率半径相对与实际线路曲率半径存在空间滞后,两者仅在圆曲线段部分重合,在其余线段均存在较大误差,无法满足主动控制系统对线路曲率半径实时性、准确性的要求。
[0054]
以上对本发明所提供的一种轨道线路曲率半径在线实时测量系统及方法均进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。