技术特征:
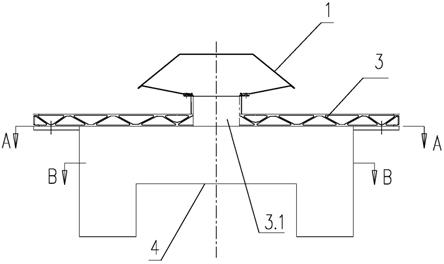
1.一种用于起重机轨道综合检测的机器人装置,起重机轨道(18)为t型轨道,其特征在于:包括激光发射部、光靶平台以及控制终端;激光发射部包括安装在起重机轨道(18)上沿水平方向发射激光束的激光发射器(11);光靶平台包括沿起重机轨道(18)移动的平台车(5)以及安装在平台车(5)外端面的控制平台车(5)移动的控制部(1)、用于接收激光发射器(11)的激光束的光靶(3)和激光测距组件(4);激光测距组件(4)沿水平方向朝另一个起重机轨道(18)发射激光束;激光发射部和光靶平台安装在其中一个起重机轨道(18)上,在平行的另一个起重机轨道(18)上设置用于接受激光测距组件(4)发射的激光束的跟随光靶小车(9)。
2.根据权利要求1所述的用于起重机轨道综合检测的机器人装置,其特征在于:起重机轨道(18)为水平方向的t型轨道。
3.根据权利要求2所述的用于起重机轨道综合检测的机器人装置,其特征在于:平台车(5)同起重机轨道(18)安装的端面设置驱动轮(7)和压紧轮(8);驱动轮(7)沿起重机轨道(18)的腹板外端面滚动;压紧轮(8)相对设置在起重机轨道(18)的腹板的两侧面并沿腹板的侧面滚动。
4.根据权利要求1所述的用于起重机轨道综合检测的机器人装置,其特征在于:激光发射部还包括用于安装在起重机轨道(18)上的支架(10),激光发射器(11)固定设置在支架(10)外端。
5.根据权利要求1所述的用于起重机轨道综合检测的机器人装置,其特征在于:光靶(3)安装在位置调节架上,并通过位置调节架固定在平台车(5)上。
6.根据权利要求5所述的用于起重机轨道综合检测的机器人装置,其特征在于:位置调节架包括相互垂直设置的y轴平台(17)和z轴平台(14),y轴平台(17)内设置由y轴电机(15)驱动的y轴丝杠(16);z轴平台(14)的下端安装在y轴丝杠(16)上形成丝杠副,z轴平台(14)内设置由z轴电机(12)驱动的z轴丝杠(13);光靶平台安装在z轴丝杠(13)上形成丝杠副。
7.根据权利要求1所述的用于起重机轨道综合检测的机器人装置,其特征在于:在平台车(5)的一端设置防撞块(2);光靶(3)设置在平台车(5)上靠近激光发射部的一端,防撞块(2)设置在平台车(5)移动时前进方向的前端。
8.根据权利要求1~7任一项所述的用于起重机轨道综合检测的机器人装置,其特征在于:激光束的光斑直径为≤8mm。
技术总结
本实用新型涉及用于起重机轨道综合检测的机器人装置,属于起重机轨道检测技术领域。所述装置包括激光发射部、光靶平台以及控制终端;激光发射部包括安装在起重机轨道上沿水平方向发射激光束的激光发射器;光靶平台包括沿起重机轨道移动的平台车以及安装在平台车外端面的控制平台车移动的控制部、用于接收激光发射器的激光束的光靶和激光测距组件;激光测距组件沿水平方向朝另一个起重机轨道发射激光束;激光发射部和光靶平台安装在其中一个起重机轨道上,在平行的另一个起重机轨道上设置接受激光测距组件发射的激光束的跟随光靶小车。通过建立起重机轨道空间坐标系的方式,对各项参数进行检测。
技术研发人员:张子健;张志强;杨楠;郭超
受保护的技术使用者:河北东讯科技有限公司
技术研发日:2020.11.24
技术公布日:2021.07.13
本文用于企业家、创业者技术爱好者查询,结果仅供参考。