1.本发明涉及救援设备技术领域,具体的,涉及一种高空救援无人机的打捞装置。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收。可反复使用多次。广泛用于空中侦察、监视、通信、反潜、电子干扰等。
3.现如今,无人机更加的贴合到了人们的生活中,被越来越多的应用在了日常的救援任务中,比如在发生火灾时,无人机可以搭载消防龙头,从空中洒水救火,或者从人力难达的刁钻角度灭火,在进行水中救援时,无人机可以搭载打捞装置,打捞装置悬吊在无人机底部,在水中进行打捞作业,发生水上事故时,经常会伴随着一些漂浮物比如船体残渣或水生植物,但因为是无人机搭载着打捞装置,没有其他方式可以处理这些漂浮物,漂浮物的存在影响了打捞作业的正常进行,容易延误救援时机。
技术实现要素:
4.本发明提出一种高空救援无人机的打捞装置,解决了相关技术中的水面漂浮物影响打捞装置正常作业的问题。
5.本发明的技术方案如下:一种高空救援无人机的打捞装置,包括:
6.筒体,用于与无人机连接,所述筒体一端面开口,另一端面上具有第一螺纹孔;
7.螺杆,所述螺杆与所述第一螺纹孔螺纹配合;
8.扇叶,所述扇叶连接于所述螺杆端部圆周面上,若干所述扇叶沿螺杆轴线阵列设置;
9.打捞机构,所述打捞机构设于所述筒体内壁上,所述螺杆与所述打捞机构连接,控制所述打捞机构进行打捞动作;
10.所述扇叶转动形成圆筒轮廓,所述打捞机构位于所述圆筒轮廓之内。
11.作为进一步的技术方案,所述打捞机构包括:
12.安装块,所述安装块连接于所述筒体内壁,所述安装块上具有第二螺纹孔;
13.打捞板,所述打捞板端部铰接于所述安装块上,所述打捞板为两个,沿所述安装块轴线对称设置;
14.驱动板,所述螺杆具有清浮段和打捞段,所述打捞段端部与所述驱动板转动连接,所述清浮段与所述第一螺纹孔螺纹配合,所述打捞段与所述第二螺纹孔螺纹配合;
15.连板,所述连板一端铰接于打捞板中部,另一端铰接于所述驱动板端部。
16.作为进一步的技术方案,还包括第一连杆,所述第一连杆一端连接于所述螺杆上,
另一端与所述扇叶连接。
17.作为进一步的技术方案,还包括第二连杆,所述第二连杆一端连接于所述安装块上,另一端连接于所述筒体内壁,所述第二连杆设有三个,沿所述安装块轴线阵列设置。
18.作为进一步的技术方案,还包括:
19.丝网,所述丝网贴设于所述筒体内壁,用于粘附水中漂浮物;
20.磁铁,所述磁铁贴设于所述筒体外壁,用于吸附金属漂浮物。
21.作为进一步的技术方案,还包括漂浮气囊,所述漂浮气囊连接于所述筒体外壁,若干所述漂浮气囊沿所述筒体轴线阵列设置,所述漂浮气囊与所述扇叶位于同一高度上。
22.作为进一步的技术方案,还包括:
23.伸缩缸,所述伸缩缸设于所述筒体顶面,所述伸缩缸具有若干个;
24.真空吸盘,所述真空吸盘球铰接于所述伸缩缸的伸缩端。
25.作为进一步的技术方案,所述打捞板与救援目标的接触面上设有柔性软垫。
26.本发明的工作原理为:筒体用于与无人机连接,筒体一端开口,另一端面上具有第一螺纹孔,螺杆与第一螺纹孔螺纹配合,伸入筒体内的圆周面上环形阵列设有若干扇叶,环形阵列的中心线为筒体轴线,螺杆与打捞机构连接,螺杆转动可以控制打捞机构进行打捞动作,若干扇叶转动后可以形成一圆筒形虚拟轮廓,打捞机构位于此圆筒形虚拟轮廓内;
27.工作时,筒体浸入水中,打捞机构位于扇叶之内,将打捞机构置于救援目标处,螺杆转动,带动若干扇叶转动,扇叶搅动水流,将救援目标周围的漂浮物推到筒体内壁,远离救援目标,扇叶由螺杆带动,在转动的同时高度缓慢下降,当扇叶下降到一定高度后,打捞机构的打捞动作完成,由无人机将整个装置提起。
28.本发明借助扇叶转动搅动水流,将打捞装置设于扇叶内,扇叶将打捞装置周围的漂浮物推至筒体内壁,远离救援目标,解决了水面漂浮物影响打捞装置正常作业的问题。
29.本发明的有益效果为:现有技术中,水上事故现场经常会伴随着一些漂浮物比如船体残渣和水生植物,这些漂浮物经常位于救援目标周围,无人机悬吊着现有的打捞装置进行打捞救援作业时,经常会被这些漂浮物影响,难以将漂浮物与救援目标分离至所要求的距离,无人机只能控制打捞装置进行打捞作业,对于漂浮物的处理比较困难,严重了还可能延误救援时机;本发明中筒体与无人机连接,无人机悬吊着打捞装置,将筒体浸入水中,把打捞机构移动至救援目标处,扇叶与水面平齐,然后通过螺杆的转动控制扇叶的转动,将救援目标周围的漂浮物推开,扇叶转动过程中也会慢慢下降,同时螺杆与打捞机构连接,控制打捞机构进行打捞动作,保证打捞机构周围水域的整洁,便于打捞工作的正常进行。
附图说明
30.下面结合附图和具体实施方式对本发明作进一步详细的说明。
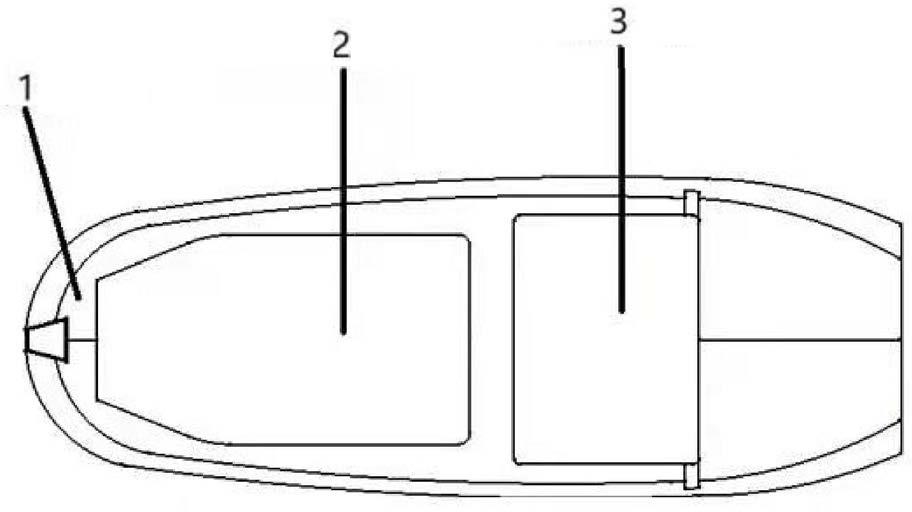
31.图1为本发明打捞装置轴测图;
32.图2为本发明筒体内部结构立体图;
33.图3为本发明筒体顶部结构示意图;
34.图4为本发明筒体内部结构示意图;
35.图5为本发明筒体内工件的立体图;
36.图6为本发明输气通道示意图;
37.图7为本发明打捞机构结构示意图;
38.图中:1、筒体,2、第一螺纹孔,3、螺杆,4、扇叶,5、安装块,6、第二螺纹孔,7、打捞板,8、驱动板,9、清浮段,10、打捞段,11、连板,12、第一连杆,13、第二连杆,14、丝网,15、磁铁,16、漂浮气囊,17、伸缩缸,18、真空吸盘,19、柔性软垫,20、清浮气囊,21、单向阀,22、压盘,23、气管,24、输气通道,25、弹簧。
具体实施方式
39.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本发明保护的范围。
40.如图1~图7所示,本实施例提出了一种高空救援无人机的打捞装置,包括:
41.筒体1,用于与无人机连接,所述筒体1一端面开口,另一端面上具有第一螺纹孔2;
42.螺杆3,所述螺杆3与所述第一螺纹孔2螺纹配合;
43.扇叶4,所述扇叶4连接于所述螺杆3端部圆周面上,若干所述扇叶4沿螺杆3轴线阵列设置;
44.打捞机构,所述打捞机构设于所述筒体1内壁上,所述螺杆3与所述打捞机构连接,控制所述打捞机构进行打捞动作;
45.所述扇叶4转动形成圆筒轮廓,所述打捞机构位于所述圆筒轮廓之内。
46.本实施例中,打捞装置的具体结构如下:筒体1用于与无人机连接,筒体1一端开口,另一端面上具有第一螺纹孔2,螺杆3与第一螺纹孔2螺纹配合,伸入筒体1内的圆周面上环形阵列设有若干扇叶4,环形阵列的中心线为筒体1轴线,螺杆3与打捞机构连接,螺杆3转动可以控制打捞机构进行打捞动作,若干扇叶4转动后可以形成一圆筒形虚拟轮廓,打捞机构位于此圆筒形虚拟轮廓内;工作时,筒体1浸入水中,打捞机构位于扇叶4之内,将打捞机构置于救援目标处,螺杆3转动,带动若干扇叶4转动,扇叶4搅动水流,将救援目标周围的漂浮物推到筒体1内壁,远离救援目标,扇叶4由螺杆3带动,在转动的同时高度缓慢下降,当扇叶4下降到一定高度后,打捞机构的打捞动作完成,由无人机将整个装置提起。
47.本实施例中借助扇叶4转动搅动水流,将打捞装置设于扇叶4内,扇叶4将打捞装置周围的漂浮物推至筒体1内壁,远离救援目标,解决了水面漂浮物影响打捞装置正常作业的问题。
48.现有技术中,水上事故现场经常会伴随着一些漂浮物比如船体残渣和水生植物,这些漂浮物经常位于救援目标周围,无人机悬吊着现有的打捞装置进行打捞救援作业时,经常会被这些漂浮物影响,难以将漂浮物与救援目标分离至所要求的距离,无人机只能控制打捞装置进行打捞作业,对于漂浮物的处理比较困难,严重了还可能延误救援时机;本实施例中筒体1与无人机连接,无人机悬吊着打捞装置,将筒体1浸入水中,把打捞机构移动至救援目标处,扇叶4与水面平齐,然后通过螺杆3的转动控制扇叶4的转动,将救援目标周围的漂浮物推开,同时螺杆3与打捞机构连接,控制打捞机构进行打捞动作,保证打捞机构周围水域的整洁,便于打捞工作的正常进行;在扇叶4转动的同时,也会缓慢下降,当打捞工作完成时,扇叶4下降到了一定深度,漂浮物也较为彻底的被推到了筒体1内壁方向,所以漂浮
物的清理工作和打捞工作实现了同时进行,清理漂浮物的同时也没有延长救援时间,进一步的加快了救援节奏,避免延误救援时机。
49.如图1~图7所示,进一步,还包括,
50.所述打捞机构包括:
51.安装块5,所述安装块5连接于所述筒体1内壁,所述安装块5上具有第二螺纹孔6;
52.打捞板7,所述打捞板7端部铰接于所述安装块5上,所述打捞板7为两个,沿所述安装块5轴线对称设置;
53.驱动板8,所述螺杆3具有清浮段9和打捞段10,所述打捞段10端部与所述驱动板8转动连接,所述清浮段9与所述第一螺纹孔2螺纹配合,所述打捞段10与所述第二螺纹孔6螺纹配合;
54.连板11,所述连板11一端铰接于打捞板7中部,另一端铰接于所述驱动板8端部。
55.本实施例中,安装块5连接于筒体1内壁,安装块5上具有第二螺纹孔6,安装块5上对称设置有两个打捞板7,打捞板7铰接于安装块5上,螺杆3上具有清浮段9和打捞段10,打捞段10端部与驱动板8转动连接,清浮段9与第一螺纹孔2螺纹配合,控制扇叶4的转动和下降运动;清浮段9旋进的同时,打捞段10与第二螺纹孔6螺纹配合,打捞段10旋进时,将驱动板8向下顶,驱动板8拉拽着两侧的连板11向下运动,连板11控制两打捞板7互相靠近,直至接触,实现了清理漂浮物和打捞工作可以同时进行,没有对原本的打捞时间产生丝毫延长,进一步避免了延误救援时机,清浮段9与打捞段10上的螺纹螺距不同,实现了对扇叶4下降速度和两打捞板7靠近速度的控制,从而使得两打捞板7接触时,扇叶4下降的深度足以将救援目标周围的漂浮物清理干净;待两打捞板7接触将救援目标托在两打捞板7之上后,无人机进行提升动作,将救援目标运至指定地点。
56.如图4~图6所示,进一步,还包括,
57.还包括第一连杆12,所述第一连杆12一端连接于所述螺杆3上,另一端与所述扇叶4连接。
58.本实施例中,第一连杆12一端连接于螺杆3上,另一端与扇叶4连接,第一连杆12为折线形杆件,使扇叶4可以设置到筒体1内的指定位置上,且杆件上连接有加强筋件,保证了第一连杆12良好的力学性能,使其可以交替承受扇叶4转动时产生的离心力以及停止转动时产生的惯性力,保证扇叶4的清理工作能正常进行,延长了使用寿命。
59.如图4~图6所示,进一步,还包括,
60.还包括第二连杆13,所述第二连杆13一端连接于所述安装块5上,另一端连接于所述筒体1内壁,所述第二连杆13设有三个,沿所述安装块5轴线阵列设置。
61.本实施例中,第二连杆13一端连接于螺杆3上,另一端于筒体1内壁,第二连杆13沿筒体1轴线环形阵列设置三个,保证安装块5的定位稳定可靠,第二连杆13为折线形杆件,使得安装块5可以与筒体1内壁连接实现固定且不和扇叶4的转动轨迹产生干涉。
62.如图1~图6所示,进一步,还包括,
63.清浮气囊20,所述清浮气囊20固定设于所述筒体1上,所述清浮气囊16内壁具有单向阀21;
64.压盘22,所述压盘22固定连接于所述打捞段10上且与所述清浮气囊16接触;
65.气管23,所述第一连杆12内具有输气通道24,所述输气通道24出口位于所述扇叶4
上且与外界连通,所述气管23一端与所述清浮气囊20连通,另一端与所述输气通道24连通。
66.本实施例中,筒体1顶部固定设有清浮气囊16,清浮气囊16内壁上具有若干个单向阀21,螺杆3的打捞段10上固定套设有压盘22,压盘22位于清浮气囊20上方,第一连杆12为中空结构,第一连杆内部具有输气通道24,输气通道24的出口位于扇叶4上,与外部连通,当螺杆3旋进时,压盘22随之旋转同时做下降运动,压盘22与清浮气囊20接触,并挤压清浮气囊20,气体挤压单向阀21阀体,使其关闭,其中的气体由气管23进入输气通道24,并最终从扇叶4上的出口喷出,在扇叶4旋转的过程中帮助吹动漂浮物,进一步提高清理效率,待整个装置从水中浮出后,清浮气囊20借助打开的单向阀21和自身的柔性恢复原状,扇叶4上的出口有三个,增大喷气面积,提高喷气清浮的效果。
67.如图4所示,进一步,还包括,
68.还包括弹簧25,所述弹簧25一端作用于所述清浮气囊20内壁顶部,另一端作用于所述清浮气囊20内壁底部,提供所述清浮气囊20膨胀的力。
69.本实施例中,弹簧25一端作用于清浮气囊20内壁顶部,另一端作用于清浮气囊20内壁底部,用来提供清浮气囊20膨胀的力,当清浮气囊20借助自身柔性胀大的速度较慢时,弹簧25将清浮气囊20撑开,便于清浮气囊20的胀大。
70.如图1~图4所示,进一步,还包括,
71.丝网14,所述丝网14贴设于所述筒体1内壁,用于粘附水中漂浮物;
72.磁铁15,所述磁铁15贴设于所述筒体1外壁,用于吸附金属漂浮物。
73.本实施例中,筒体1内壁贴设有一层丝网14,丝网14可以将扇叶4推过来的漂浮物粘附住,防止漂浮物随意乱漂,磁铁15贴设于筒体1外壁,可以吸附水中的金属漂浮物,丝网14和磁铁15与扇叶4共同配合,高效快速的完成漂浮物的清理工作,同时被清理的漂浮物粘附在筒体1上,被无人机提升运输离开水域,不会再回到水中,便于后续救援工作的进行,发生水上事故时,救援工作不是唯一的工作,为保护水域环境,救援工作完成之后还有大量的环境清理工作,本实施例在为救援工作提供了便利的同时,将漂浮物带离水域,对水域环境进行了清洁,也为救援工作之后的环境清理工作做好了铺垫。
74.如图1~图3所示,进一步,还包括,
75.还包括漂浮气囊16,所述漂浮气囊16连接于所述筒体1外壁,若干所述漂浮气囊16沿所述筒体1轴线阵列设置,所述漂浮气囊16与所述扇叶4位于同一高度上。
76.本实施例中,筒体1外壁上沿筒体1轴线环形阵列设置有若干个漂浮气囊16,保证筒体1在水面上平稳可靠的漂浮,漂浮气囊16与扇叶4位于同一高度上,使得筒体1漂浮于水面上时,扇叶4可以位于水面之上且相对靠近水面的位置,保证扇叶4搅动水流后可以充分的推动水上漂浮物。
77.如图1~图4所示,进一步,还包括,
78.伸缩缸17,所述伸缩缸17设于所述筒体1顶面,所述伸缩缸17具有若干个;
79.真空吸盘18,所述真空吸盘18球铰接于所述伸缩缸17的伸缩端。
80.本实施例中,筒体1顶面上设有若干伸缩缸17,伸缩缸17的伸缩端球铰接有真空吸盘18,使得真空吸盘18可以实现三维的转动,真空吸盘18用于和无人机的底部连接,三维的转动可以让真空吸盘18呈现更多不同的角度,适配更多不同形状的无人机底部,伸缩缸17可以方便的调节筒体1的高度,在水面不平整的情况下,各个伸缩缸17可以根据正下方的水
位高度来调节自身的伸缩量,使得筒体1可以尽量的与水面保持平行,这样可以确保扇叶4转动时受到的水流阻力均匀,形成的水纹更加均匀,可以更好的搅动水流,提高清洁漂浮物的效率。
81.如图7所示,进一步,还包括,
82.所述打捞板7与救援目标的接触面上设有柔性软垫19。
83.本实施例中,打捞板7与救援目标的接触面上设有柔性软垫19,当救援目标为人时,柔性软垫19可以防止伤员与硬性部件的接触,防止伤员伤情加重。
84.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。