本发明涉及一种采用变体起落架的短距/垂直起降飞行器,属于航空技术领域。
背景技术:
参照其他新型垂直起降机型,其设计指标多设定为stovl(短距垂直起降)飞行器而非单纯的vtol(垂直起降)飞行器,目的就是避免垂直起飞对发动机功率的严苛要求,从而导致起飞重量受限,无法满油或满挂载起飞。
如美国的f35-b,在垂直起飞时,其起飞重量被限制到只有16.8吨,但f35-b自身的空重就已经达到了14.7吨,这样扣除空重,只剩下2.1吨的重量可以用于有效载荷。这种情况下,即使不挂任何弹药,f35-b也只能装载34%的燃油,要携带弹药燃油还得进一步减少,如果携带1吨弹药,f35-b的燃油会下降到可怜的18%,这几乎已经没有多少作战半径了。
当f35-b采用短距起飞时,在这种模式下:升力风扇也需要工作,尾喷口也需要偏转,但并不需要提供全部的升力。事实上起飞时升力风扇的喷流向后倾斜15度,飞机的主发动机向下倾斜65度,发动机大约会产生总推力72%的水平方向推力,和总推力68%的升力。在这种情况下,f35-b滑跑122米可以达到22.7吨的起飞重量。扣除14.7吨的空重,还有8吨的有效载荷,可以装满燃油(6.1吨)并携带1.9吨的弹药。如果进一步加长短距起飞的滑跑距离并配合滑越甲板(英国伊丽莎白女王级航母为f35-b准备了167米的滑越跑道),f35-b甚至可以以27吨的设计最大起飞重量起飞,这时的有效载荷达12.3吨,从而具备极强的作战能力。
北大西洋公约组织(nato)对变体飞行器有如下定义:通过局部或整体改变飞行器的外形形状使飞行器能够实时适应多种任务需求且使飞行器能在多种环境下保持最优性能和效率。但目前主要的发展方向为变后(前)掠飞行器、变展长飞行器、倾斜翼变体飞行器、卷弧翼飞行器以及组合式变体飞行器,针对起落架的变体技术还比较少,且实现目的多为起落架可收放功能设计。
技术实现要素:
本发明针对上述问题提供了一种采用变体起落架的短距/垂直起降飞行器。
本发明采用如下技术方案:
本发明所述的采用变体起落架的短距/垂直起降飞行器,包括动力系统、机身、机翼、副翼、尾撑系统,轮式前起落架,轮式前后落架;所述的机翼固定在机身上,机翼上安装动力系统;机翼上设置副翼;机身上设有轮式前起落架;所述机翼的翼顶面、翼底面分别设有用于飞行器垂直起降或短距起降的尾撑系统;位于翼底面的尾撑系统内设有轮式前后落架;尾撑系统为向外开合姿态或向内收拢闭合姿态;
所述位于翼底面的尾撑系统通过轮式前后落架与机身的轮式前起落架支撑飞行器用于短距起降模式;
所述位于翼顶面尾撑系统及翼底面尾撑系统向外开合形成支撑姿态用于飞行器垂直起降模式。
本发明所述的采用变体起落架的短距/垂直起降飞行器,所述的机身两侧的机翼内分别设有用于控制翼顶面的尾撑系统及翼底面的尾撑系统的支撑杆控制舵机及尾撑杆控制舵机;
所述的位于机翼翼顶面的尾撑系统包括支撑杆一、尾撑杆一、尾撑水平尾翼一、尾撑垂直尾翼一、支撑杆拉杆一与尾撑杆拉杆一;所述的支撑杆一、尾撑杆一至少为两组,位于机身两侧的机翼翼顶面上,支撑杆一的一端与机翼通过轴体铰接,支撑杆一的另一端与尾撑杆一的一端通过轴体铰接,尾撑杆一的另一端布置尾撑垂直尾翼一;所述尾撑杆一之间设有平行于机翼的尾撑水平尾翼一;所述支撑杆拉杆一的一端与支撑杆一的机翼部轴体相固连,支撑杆拉杆一的另一端与翼顶面的支撑杆控制舵机的驱动端相连;尾撑杆拉杆一的一端固连在尾撑杆一一端的轴体上,尾撑杆拉杆一的另一端与翼顶面的尾撑杆控制舵机相连;
所述的位于机翼翼底面的尾撑系统包括支撑杆二、尾撑杆二、尾撑水平尾翼二、尾撑垂直尾翼二;支撑杆拉杆二与尾撑杆拉杆二;
所述的支撑杆二、尾撑杆二至少为两组,位于机身两侧的机翼翼顶面上,支撑杆二的一端与机翼通过轴体铰接,支撑杆二的另一端与尾撑杆二的一端通过轴体铰接,尾撑杆二的另一端布置尾撑垂直尾翼二;所述尾撑杆二之间设有平行于机翼的尾撑水平尾翼二;所述支撑杆拉杆二的一端与支撑杆二的机翼部轴体相固连,支撑杆拉杆二的另一端与翼底面的支撑杆控制舵机的驱动端相连;尾撑杆拉杆二的一端固连在尾撑杆二一端的轴体上,尾撑杆拉杆二的另一端与翼底面的尾撑杆控制舵机相连。
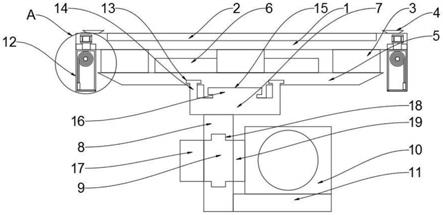
本发明所述的采用变体起落架的短距/垂直起降飞行器,所述轮式前起落架包括:机身连接驱动机构、收杆、拉杆、收拉杆连接件、主缓冲器、旋转机构、机轮连接件及前机轮;
所述缓冲器通过机身连接驱动机构与机身铰接,收拉杆连接件作为外筒与主缓冲器固连;
所述收杆的顶端延伸至机身的内腹部,收杆尾端与拉杆顶端相连,拉杆的尾端与收拉杆连接件铰接,前机轮通过机轮连接件与主缓冲器固连,并可通过旋转机构绕主缓冲器轴线旋转,旋转角度为90°。
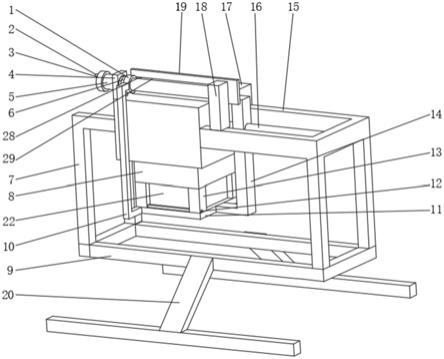
本发明所述的采用变体起落架的短距/垂直起降飞行器,所述的轮式后起落架包括后起落架连接件、后起落架滑轨、半收放外壳、上摇臂、缓冲器、下摇臂及后机轮;所述尾撑垂直尾翼二内设有后起落架滑轨、后起落架连接件;半收放外壳装配在后起落架滑轨上,沿后起落架滑轨延伸方向滑动;半收放外壳的底端部设有装配后机轮轮轴的轴孔;
所述后起落架连接件的下端固定缓冲器,缓冲器的外侧壁与上摇臂的一端铰接,上摇臂的另一端与下摇臂的一端铰接,下摇臂的另一端与后机轮的轮轴相铰接;缓冲器的底端还与下摇臂臂体中部相铰接;
所述的轮式后起落架承载时,半收放外壳随轮式后起落架动作在后起落架滑轨中上下运动;
本发明所述的采用变体起落架的短距/垂直起降飞行器,所述的尾撑水平尾翼距飞行器重心的距离为支撑杆一与尾撑杆一或支撑杆二与尾撑杆二的长度之和。
本发明所述的采用变体起落架的短距/垂直起降飞行器,所述飞行器进行自适应垂直降落时,支撑杆控制舵机及尾撑杆控制舵机驱动支撑杆一、尾撑杆一、支撑杆二及尾撑杆二转动,调整支撑杆一、尾撑杆一、支撑杆二及尾撑杆二变化至与降落区域环境高配合度的姿态进行降落。
本发明所述的采用变体起落架的短距/垂直起降飞行器,尾撑垂直尾翼二、半收放外壳、上摇臂、缓冲器、下摇臂、后机轮的对称面统一共面。
有益效果
本发明提供的采用变体起落架的短距/垂直起降飞行器,集固定翼和旋翼飞机的优势于一体,既能显著降低飞机对起降条件的要求,又具备较强的飞行作战能力,具有小平台使用例如:中小型航母、两栖攻击舰、运输舰及海洋岛礁等大威力发挥的显著特点。
本发明提供的采用变体起落架的短距/垂直起降飞行器,采用的变体起落架,可根据任务及环境需要调整姿态模式,在起降环境恶劣需要垂直起降时,支撑杆与尾撑杆对停放在地面的飞行器起支撑保护作用,待飞行器转平飞的巡航状态下,可主动控制将两侧对称展开的尾撑与支撑杆相互对接,对接后不仅降低了尾撑与支撑杆结构自身带来的附加阻力,由于主体位于机身尾部,位于尾撑上的平尾和垂尾距离飞行器重心较远,用于配平和操纵的力臂长,操纵能力强,且配平附加阻力小,提高了飞行器在飞行时的控制能力和飞行效率,当飞行器模式转换及垂直降落时,对称二段可控的起落架可进行自适应辅助配平调整和着陆,增强了对未来复杂环境下的任务工作的适应性。
本发明提供的采用变体起落架的短距/垂直起降飞行器,根据实际的环境因素飞行器可选用滑跑起降的方式,滑跑起飞前及降落后,飞行器通过轮式前起落架和轮式后起落支撑在起飞/停放区域表面,承担飞行器的主要重量及保持姿态平衡,改变起降方式只需要控制轮式前起落架进行收放和支撑杆与尾撑杆的姿态变化,同时不起支撑作用一侧的支撑杆、尾撑杆、尾撑水平尾翼和尾撑垂直尾翼调整至平飞状态,辅助短距/垂直起降飞行器进行控制调节,通过简单的结构变化增加了柔性功能的实现。
附图说明
图1为一种采用变体起落架的短距/垂直起降飞行器模式转换状态起落架自适应调整示意图;
图2为一种采用变体起落架的短距/垂直起降飞行器轮式前起落架结构示意图;
图3为一种采用变体起落架的短距/垂直起降飞行器轮式后起落架结构示意图;
图4为一种采用变体起落架的短距/垂直起降飞行器滑跑起降及停放状态示意图;
图5为一种采用变体起落架的短距/垂直起降飞行器垂直起降及停放状态示意图;
图6为一种采用变体起落架的短距/垂直起降飞行器右侧先着地自适应降落状态示意图;
图7为一种采用变体起落架的短距/垂直起降飞行器左侧先着地自适应降落状态示意图;
图8为一种采用变体起落架的短距/垂直起降飞行器地面自适应调节姿态状态示意图;
图9为一种采用变体起落架的短距/垂直起降飞行器巡航状态示意图;
图10为起落架姿态驱动结构两段平直状态示意图;
图11为起落架姿态驱动结构两段弯折状态示意图;
图12为位于机翼中支撑杆控制舵机及连接示意图;
图13为位于机翼中尾撑杆控制舵机及连接示意图;
其中,1-动力系统、2-机身、3-机翼、4-支撑杆控制舵机、5-副翼、6-尾撑杆控制舵机、7-支撑杆一、8-尾撑杆一、9-尾撑水平尾翼一、10-尾撑垂直尾翼一、71-支撑杆二、81-尾撑杆二、91-尾撑水平尾翼二、101-尾撑垂直尾翼二、11-轮式前起落架、111-机身连接驱动机构、112-收杆、113-拉杆、114-收拉杆连接件、115-主缓冲器、116-旋转机构、117-机轮连接件、118-前机轮、12-轮式后起落架、121-后起落架连接件、122-后起落架滑轨、123-半收放外壳、124-上摇臂、125-缓冲器、126-下摇臂、127-后机轮、13-支撑杆拉杆一、14-尾撑杆拉杆一、131-支撑杆拉杆二、141-尾撑杆拉杆二。
具体实施方式
下面将结合示意图对本发明进行更详细的描述,其中表示了本发明的优选实施例,应该理解本领域技术人员可以修改在此描述的本发明,而仍然实现本发明的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本发明的限制。
如图1所示:采用变体起落架的短距/垂直起降飞行器,包括动力系统1、机身2、机翼3、副翼5、尾撑系统,轮式前起落架11,轮式前后落架12;所述的机翼3固定在机身2上,机翼3上安装动力系统1;机翼3上设置副翼5;机身2上设有轮式前起落架11;机翼3的翼顶面、翼底面分别设有用于飞行器垂直起降或短距起降的尾撑系统;位于翼底面的尾撑系统内设有轮式前后落架12;尾撑系统为向外开合姿态或向内收拢闭合姿态;位于翼底面的尾撑系统通过轮式前后落架12与机身2的轮式前起落架11支撑飞行器用于短距起降模式;位于翼顶面尾撑系统及翼底面尾撑系统向外开合形成支撑姿态用于飞行器垂直起降模式。动力系统1为短距/垂直起降飞行器提供升力并具备姿态操纵能力,动力系统1的运动包络体与起落架变体运动包络体不重叠。
机身2两侧的机翼3内分别设有用于控制翼顶面的尾撑系统及翼底面的尾撑系统的支撑杆控制舵机4及尾撑杆控制舵机6;
位于机翼3翼顶面的尾撑系统包括支撑杆一7、尾撑杆一8、尾撑水平尾翼一9、尾撑垂直尾翼一10、支撑杆拉杆一13与尾撑杆拉杆一14;支撑杆一7、尾撑杆一8至少为两组,位于机身2两侧的机翼3翼顶面上,支撑杆一7的一端与机翼3通过轴体铰接,支撑杆一7的另一端与尾撑杆一8的一端通过轴体铰接,尾撑杆一8的另一端布置尾撑垂直尾翼一10;所述尾撑杆一8之间设有平行于机翼3的尾撑水平尾翼一9;所述支撑杆拉杆一13的一端与支撑杆一7的机翼3部轴体相固连,支撑杆拉杆一13的另一端与翼顶面的支撑杆控制舵机4的驱动端相连;尾撑杆拉杆一14的一端固连在尾撑杆一8一端的轴体上,尾撑杆拉杆一14的另一端与翼顶面的尾撑杆控制舵机6相连;
所述的位于机翼3翼底面的尾撑系统包括支撑杆二71、尾撑杆二81、尾撑水平尾翼二91、尾撑垂直尾翼二101;支撑杆拉杆二131与尾撑杆拉杆二141;
所述的支撑杆二71、尾撑杆二81至少为两组,位于机身2两侧的机翼3翼顶面上,支撑杆二71的一端与机翼3通过轴体铰接,支撑杆二71的另一端与尾撑杆二81的一端通过轴体铰接,尾撑杆二81的另一端布置尾撑垂直尾翼二101;所述尾撑杆二81之间设有平行于机翼3的尾撑水平尾翼二91;所述支撑杆拉杆二131的一端与支撑杆二71的机翼3部轴体相固连,支撑杆拉杆二131的另一端与翼底面的支撑杆控制舵机4的驱动端相连;尾撑杆拉杆二141的一端固连在尾撑杆二81一端的轴体上,尾撑杆拉杆二141的另一端与翼底面的尾撑杆控制舵机6相连。
短距/垂直起降飞行器垂直起飞前及降落后,短距/垂直起降飞行器通过支撑杆一7、尾撑杆一8、尾撑水平尾翼一9、尾撑垂直尾翼一10、支撑杆二71、尾撑杆二81、尾撑水平尾翼二91、尾撑垂直尾翼二101支撑在起飞/停放区域表面,承担短距/垂直起降飞行器的主要重量及保持姿态平衡;
短距/垂直起降飞行器进行悬停转平飞或平飞转悬停的模式转换过程中,支撑杆控制舵机4及尾撑杆控制舵机6驱动支撑杆一7、尾撑杆一8、支撑杆二71及尾撑杆二81转动,使得支撑杆一7、尾撑杆一8、支撑杆二71及尾撑杆二81相对机身2进行姿态调整;
辅助短距/垂直起降飞行器配平,两个尾撑水平尾翼与副翼5配合调节适应气流方向,产生有助于机身2飞行的气动力,待短距/垂直起降飞行器稳定后,起落架逐渐闭合,整体结构位于机身2尾端,两个尾撑水平尾翼距短距/垂直起降飞行器重心的距离为支撑杆一7、尾撑杆一8或支撑杆二71、尾撑杆二81的长度之和,支撑杆一7、尾撑杆一8或支撑杆二71、尾撑杆二81的长度参数需保证尾撑水平尾翼9具备良好的操纵性能。
短距/垂直起降飞行器进行自适应垂直降落时,支撑杆控制舵机4及尾撑杆控制舵机6驱动支撑杆一7、尾撑杆一8、支撑杆二71及尾撑杆二81转动,调整支撑杆一7、尾撑杆一8、支撑杆二71及尾撑杆二81变化至与降落区域环境高配合度的姿态进行降落。
如图2所示:采用变体起落架的短距/垂直起降飞行器,轮式前起落架11包括机身连接驱动机构111、收杆112、拉杆113、收拉杆连接件114、主缓冲器115、旋转机构116、机轮连接件117及前机轮118;
所述缓冲器115通过机身连接驱动机构111与机身2铰接,收拉杆连接件114作为外筒与主缓冲器115固连;收杆112的顶端延伸至机身2的内腹部,收杆112尾端与拉杆113顶端相连,拉杆113的尾端与收拉杆连接件114铰接,前机轮118通过机轮连接件117与主缓冲器115固连,并可通过旋转机构116绕主缓冲器115轴线旋转,旋转角度为90°。
如图3所示:轮式后起落架12包括后起落架连接件121、后起落架滑轨122、半收放外壳123、上摇臂124、缓冲器125、下摇臂126及后机轮127;尾撑垂直尾翼二101内设有后起落架滑轨122、后起落架连接件121;半收放外壳123装配在后起落架滑轨122上,沿后起落架滑轨122延伸方向滑动;半收放外壳123的底端部设有装配后机轮127轮轴的轴孔;
后起落架连接件121的下端固定缓冲器125,缓冲器125的外侧壁与上摇臂124的一端铰接,上摇臂124的另一端与下摇臂126的一端铰接,下摇臂126的另一端与后机轮127的轮轴相铰接;缓冲器125的底端还与下摇臂126臂体中部相铰接;半收放外壳123底部设置有滑槽避免轮式后起落架12承载作动时与半收放外壳123干涉,尾撑垂直尾翼10、半收放外壳123、上摇臂124、缓冲器125、下摇臂126及后机轮127的对称平面共面,轮式后起落架12承载时,半收放外壳123随轮式后起落架12动作在后起落架滑轨122中上下运动。
如图4所示:短距/垂直起降飞行器滑跑起飞前及降落后,短距/垂直起降飞行器通过轮式前起落架11和轮式后起落架12支撑在起飞/停放区域表面,承担短距/垂直起降飞行器的主要重量及保持姿态平衡,停放及滑跑时,在机身连接驱动机构111控制下,轮式前起落架11展开,同时短距/垂直起降飞行器单侧远离地面方向的支撑杆7和尾撑杆8姿态为向机身尾部合拢,调整至平飞状态,辅助短距/垂直起降飞行器进行控制调节,另一侧的支撑杆7和尾撑杆8的姿态调整至同轴状态并张开一定角度,保证轮式前起落架1与轮式后起落架12触地时,动力系统1的部件不会与地面发生干涉。
图5所示:采用变体起落架的短距/垂直起降飞行器垂直起降及停放状态;支撑杆一7、尾撑杆一8、支撑杆二71、尾撑杆二81由支撑杆控制舵机4及尾撑杆控制舵机6控制相互展开,支撑杆一7、尾撑杆一8变形成直线形,支撑杆二71、尾撑杆二81形成直线形;支撑杆一7、尾撑杆一8与支撑杆二71、尾撑杆二81形成“人”字形支撑结构。
如图6所示:采用变体起落架的短距/垂直起降飞行器,在飞行器急速降落,飞行器一侧的尾撑系统触地时,尾撑系统回弹时长大于支撑杆及尾撑杆自适应调节时长;此时,支撑杆一7与尾撑杆一8变形成直线形首先触地,支撑杆二71与尾撑杆二81形变成内折状二次触地。
如图7所示:采用变体起落架的短距/垂直起降飞行器,在飞行器急速降落,飞行器一侧的尾撑系统触地时,尾撑系统回弹时长小于支撑杆及尾撑杆自适应调节时长;此时,支撑杆一7与尾撑杆一8变形成直线形首先触地,支撑杆二71与尾撑杆二81形变成外曲状二次触地。
图8所示:降落过程中,由于飞行器遇到非对称性影响,重力影响、侧风影响,触地后支撑杆一7、尾撑杆一8、支撑杆二71与尾撑杆二81进行二次调节以稳定机身。
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。