技术特征:
1.一种地外天体表面摩擦动力型机器人,其特征在于,包括外壳体(1)、驱动部(2)和摩擦部(3),所述外壳体(1)呈球形;其中:
所述驱动部(2)和所述摩擦部(3)安装在所述外壳体(1)中;
所述摩擦部(3)被设置为能够在所述驱动部(2)的驱动下进行动作;
所述地外天体表面摩擦动力型机器人具有运动状态,在所述运动状态下,所述驱动部(2)驱动所述摩擦部(3)与所述外壳体(1)之间产生摩擦力,以使得所述外壳体(1)产生转动,进而使得所述外壳体(1)与地外天体表面之间产生相互作用,从而实现所述地外天体表面摩擦动力型机器人在所述地外天体表面上进行移动动作。
2.根据权利要求1所述的地外天体表面摩擦动力型机器人,其特征在于,所述地外天体摩擦动力型机器人还具有静止状态,在所述静止状态下,所述驱动部(2)未驱动所述摩擦部(3),此时所述外壳体(1)与地外天体表面之间未产生相互作用,以使得所述地外天体表面摩擦动力型机器人在所述地外天体表面上进行稳定附着。
3.根据权利要求1所述的地外天体表面摩擦动力型机器人,其特征在于,所述外壳体(1)的内表面为粗糙球面,以增大所述摩擦部(3)与所述外壳体(1)之间的摩擦力。
4.根据权利要求1所述的地外天体表面摩擦动力型机器人,其特征在于,所述移动动作包括以下各项中的至少一项:前进动作、后退动作、左转动作、右转动作。
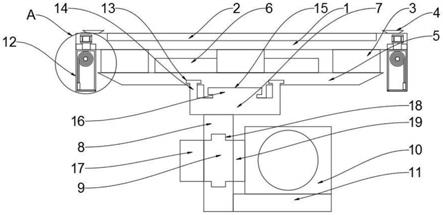
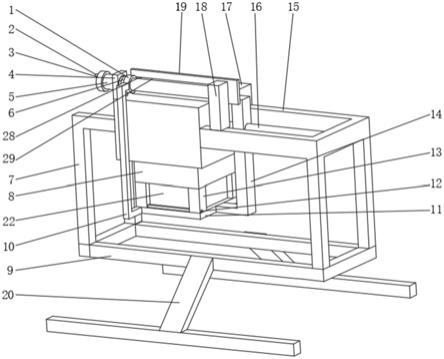
5.根据权利要求1-4中任一项所述的地外天体表面摩擦动力型机器人,其特征在于,所述驱动部(2)包括第一驱动机构(21)、以及第二驱动机构(22)。
6.根据权利要求5所述的地外天体表面摩擦动力型机器人,其特征在于,所述摩擦部(3)包括与所述第一驱动机构(21)相互配合的第一摩擦机构(31)、以及与所述第二驱动机构(22)相互配合的第二摩擦机构(32)。
7.根据权利要求6所述的地外天体表面摩擦动力型机器人,其特征在于,所述运动状态包括第一运动动作状态,在所述第一运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿顺时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿顺时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行前进动作。
8.根据权利要求6所述的地外天体表面摩擦动力型机器人,其特征在于,所述运动状态包括第二运动动作状态,在所述第二运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿逆时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿逆时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行后退动作。
9.根据权利要求6所述的地外天体表面摩擦动力型机器人,其特征在于,所述运动状态包括第三运动动作状态,在所述第三运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿顺时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿逆时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行左转动作。
10.根据权利要求6所述的地外天体表面摩擦动力型机器人,其特征在于,所述运动状态包括第四运动动作状态,在所述第四运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿逆时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿顺时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行右转动作。
11.根据权利要求6-10中任一项所述的地外天体表面摩擦动力型机器人,其特征在于,所述第一驱动机构(21)包括第一电机(211)、第一齿轮组(212)、以及第一联轴器(213)。
12.根据权利要求11所述的地外天体表面摩擦动力型机器人,其特征在于,所述第一摩擦机构(31)包括与所述第一联轴器(213)相互配合的第一摩擦球轮(311)。
13.根据权利要求6-10中任一项所述的地外天体表面摩擦动力型机器人,其特征在于,所述第二驱动机构(22)包括第二电机(221)、第二齿轮组(222)、以及第二联轴器(223)。
14.根据权利要求13所述的地外天体表面摩擦动力型机器人,其特征在于,所述第二摩擦机构(32)包括与所述第二联轴器(223)相互配合的第二摩擦球轮(321)。
15.根据权利要求6-10中任一项所述的地外天体表面摩擦动力型机器人,其特征在于,所述第一驱动机构(21)与所述第二驱动机构(22)相互对称设置,所述第一摩擦机构(31)与所述第二摩擦机构(32)相互对称设置。
16.根据权利要求15所述的地外天体表面摩擦动力型机器人,其特征在于,所述第一驱动机构(21)、所述第一摩擦机构(31)、所述第二驱动机构(22)、所述第二摩擦机构(32)设置在同一轴线上。
17.根据权利要求15所述的地外天体表面摩擦动力型机器人,其特征在于,所述外壳体(1)包括左半壳体(11)和右半壳体(12);所述第一摩擦机构(31)能够与所述左半壳体(11)产生摩擦力,所述第二摩擦机构(32)能够与所述右半壳体(12)产生摩擦力。
18.根据权利要求1-4中任一项所述的地外天体表面摩擦动力型机器人,其特征在于,还包括电路板(4),所述电路板(4)包括:电源部(41),用于为所述地外天体表面摩擦动力型机器人提供电源。
19.根据权利要求18所述的地外天体表面摩擦动力型机器人,其特征在于,所述电路板(4)还包括:遥控部(42),用于接收外部控制信号,以遥控所述地外天体表面摩擦动力型机器人。
20.根据权利要求19所述的地外天体表面摩擦动力型机器人,其特征在于,所述遥控部(42)能够接收以下信号中的至少一种:无线遥感控制信号、红外信号、蓝牙信号。
21.根据权利要求18所述的地外天体表面摩擦动力型机器人,其特征在于,所述电路板设置在所述外壳体(1)内部靠近所述地外天体表面的位置,以使得所述地外天体表面摩擦动力型机器人的重心靠近所述地外天体表面。
22.根据权利要求18所述的地外天体表面摩擦动力型机器人,其特征在于,所述电路板(4)下方还设置有磁铁(5)。
23.根据权利要求18所述的地外天体表面摩擦动力型机器人,其特征在于,所述电路板沿着垂直于所述地外天体表面的方向设置,所述驱动部(2)和所述摩擦部(3)沿着平行于所述地外天体表面的方向设置。
24.一种地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述地外天体表面摩擦动力型机器人包括外壳体(1)、驱动部(2)和摩擦部(3);所述外壳体(1)呈球形;
其中,所述驱动部(2)和所述摩擦部(3)安装在所述外壳体(1)中;所述摩擦部(3)被设置为能够在所述驱动部(2)的驱动下进行动作;
其中,所述地外天体表面摩擦动力型机器人具有运动状态,所述移动方法包括:
在所述运动状态下,所述驱动部(2)驱动所述摩擦部(3)与所述外壳体(1)之间产生摩擦力,以使得所述外壳体(1)产生转动,进而使得所述外壳体(1)与地外天体表面之间产生相互作用,从而实现所述地外天体表面摩擦动力型机器人在所述地外天体表面上进行移动动作。
25.根据权利要求24所述的地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述地外天体表面摩擦动力型机器人还具有静止状态,所述移动方法包括:
在所述静止状态下,所述驱动部(2)未驱动所述摩擦部(3),此时所述外壳体(1)与地外天体表面之间未产生相互作用,以使得所述摩擦动力型机器人在所述地外天体表面上进行稳定附着。
26.根据权利要求24所述的地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述移动动作包括以下各项中的至少一项:前进动作、后退动作、左转动作、右转动作。
27.根据权利要求24-26中任一项所述的地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述驱动部(2)包括第一驱动机构(21)、以及第二驱动机构(22);所述摩擦部(3)包括与所述第一驱动机构(21)相互配合的第一摩擦机构(31)、以及与所述第二驱动机构(22)相互配合的第二摩擦机构(32)。
28.根据权利要求27所述的地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述运动状态包括第一运动动作状态,所述移动方法包括:
在所述第一运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿顺时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿顺时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行前进动作。
29.根据权利要求27所述的地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述运动状态包括第二运动动作状态,所述移动方法包括:
在所述第二运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿逆时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿逆时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行后退动作。
30.根据权利要求27所述的地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述运动状态包括第三运动动作状态,所述移动方法包括:
在所述第三运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿顺时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿逆时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行左转动作。
31.根据权利要求27所述的地外天体表面摩擦动力型机器人的移动方法,其特征在于,所述运动状态包括第四运动动作状态,所述移动方法包括:
在所述第四运动动作状态下,所述第一驱动机构(21)驱动所述第一摩擦机构(31)与所述外壳体(1)产生紧密接触并沿逆时针转动,所述第二驱动机构(22)驱动所述第二摩擦机构(32)与所述外壳体(1)产生紧密接触并沿顺时针转动,从而在所述外壳体(1)内部产生摩擦力,以便驱动所述地外天体表面摩擦动力型机器人进行右转动作。
技术总结
本发明各实施例公开了一种地外天体表面摩擦动力型机器人及其移动方法,该地外天体表面摩擦动力型机器人包括外壳体(1)、驱动部(2)和摩擦部(3),所述外壳体(1)呈球形;其中:所述驱动部(2)和所述摩擦部(3)安装在所述外壳体(1)中;所述摩擦部(3)被设置为能够在所述驱动部(2)的驱动下进行动作;该地外天体表面摩擦动力型机器人具有运动状态,在所述运动状态下,所述驱动部(2)驱动所述摩擦部(3)与所述外壳体(1)之间产生摩擦力,以使得所述外壳体(1)产生转动,进而使得所述外壳体(1)与地外天体表面之间产生相互作用,从而实现该地外天体表面摩擦动力型机器人在所述地外天体表面上进行移动动作。
技术研发人员:王慧敏;林杨挺;胡森;郭春华;李静
受保护的技术使用者:中国科学院地质与地球物理研究所
技术研发日:2021.07.27
技术公布日:2021.08.24
本文用于企业家、创业者技术爱好者查询,结果仅供参考。