本发明仿生设计技术领域,具体涉及一种仿鸟类小翼羽的飞行器的仿生结构。
背景技术:
鸟类翅膀中的小翼羽虽然只是鸟类翅膀中的极小一部分,但是不论是在鸟类飞行过程中的控制平衡,还是在鸟类飞行过程中的灵活性控制;再者还是在鸟类起飞过程中的加速以及在鸟类降落过程中的减速功能,都起着至关重要甚至不可代替的作用。
目前市面上并未有关于仿类小翼羽的控制飞行器结构设计,现在针对并未有针对于并未有鸟类小翼羽仿生结构的设计缺失的现状,设计出一套较为完整的仿鸟类小翼羽的飞行器仿生结构,尽量还原鸟类的仿生结构以及自然进化带来的强大适应能力。
技术实现要素:
鉴于现有技术存在的问题,本发明的目的在于提供一种仿鸟类小翼羽的飞行器的仿生结构,使得飞行器的构造更加轻便,其成本降低。
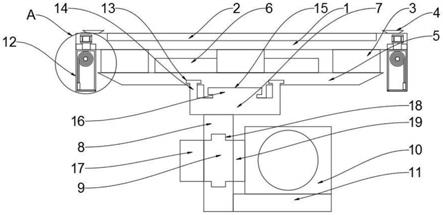
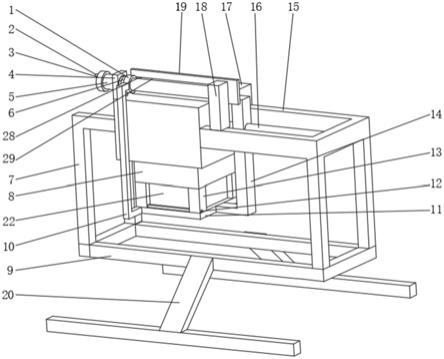
本发明提出了一种仿鸟类小翼羽的飞行器的仿生结构,包括仿生小翼羽、仿生羽毛系统、仿生掌骨及仿生驱动机构,所述仿生掌骨上设有仿生小翼羽,所述仿生小翼羽与仿生掌骨通过球铰连接,所述仿生小翼羽上设有仿生驱动机构,所述仿生驱动机构的一端与仿生小翼羽固定连接,其另一端与仿生掌骨活动连接,所述仿生羽毛系统包括一组仿生羽毛,所述仿生羽毛设置于仿生小翼羽的尾部,所述仿生羽毛与仿生小翼羽通过铰链连接。
进一步地,所述仿生驱动机构包括第一上仿生肌腱、第二上仿生肌腱、底部仿生肌腱、第一侧上方仿生肌腱、第二侧上方仿生肌腱、第一侧下方仿生肌腱及第二侧下方仿生肌腱。
进一步地,所述第一上仿生肌腱的一端和第二上仿生肌腱的一端对称设置于仿生小翼羽的顶部;所述第一侧上方仿生肌腱的一端和第二侧上方仿生肌腱的一端对称设置于仿生小翼羽的侧上方;所述第一侧下方仿生肌腱的一端和第二侧下方仿生肌腱的一端对称设置于仿生小翼羽的侧下方;所述底部仿生肌腱的一端设置于仿生小翼羽的底部。
进一步地,所述第一上仿生肌腱的另一端和第二上仿生肌腱的另一端对称设置于仿生掌骨的顶部;所述第一侧上方仿生肌腱的另一端和第二侧上方仿生肌腱的另一端对称设置于仿生掌骨的侧上方;所述第一侧下方仿生肌腱的另一端和第二侧下方仿生肌腱的另一端对称设置于仿生掌骨的侧下方;所述底部仿生肌腱的另一端设置于仿生掌骨上。
进一步地,所述第一上仿生肌腱、第二上仿生肌腱、底部仿生肌腱、第一侧上方仿生肌腱、第二侧上方仿生肌腱、第一侧下方仿生肌腱及第二侧下方仿生肌腱均通过螺丝与仿生小翼羽连接。
进一步地,包括一组微型直线伺服驱动器,所述微型直线伺服驱动器设置于仿生掌内,所述第一上仿生肌腱的另一端、第二上仿生肌腱的另一端、底部仿生肌腱的另一端、第一侧上方仿生肌腱的另一端、第二侧上方仿生肌腱的另一端、第一侧下方仿生肌腱的另一端及第二侧下方仿生肌腱的另一端均与仿生掌骨对应的位置设有连接孔,且其均穿过对应的连接孔与其对应的微型直线伺服驱动器连接。
进一步地,所述微型直线伺服驱动器的个数为7个。
进一步地,包括电源,所述微型直线伺服驱动器与电源电性连接。
进一步地,所述仿生羽毛包括第一仿生羽毛、第二仿生羽毛及第三仿生羽毛,所述第二仿生羽毛设置于仿生小翼羽的尾尖,所述第一仿生羽毛和第三仿生羽毛分别设置于仿生小翼羽的尾部的上方和下方。
与现有技术相比较,本发明的有益效果:
采用本发明的技术方案,通过仿生材料上加装仿生驱动机构,将鸟类小翼羽进行仿生简化,得到一个仿生小翼羽的飞行器的仿生结构,使得飞行器能够在起飞和降落的同时,保证产生较大阻力,同时也能够产生较大的升力以及稳定性;能够在平稳飞行时产生较大的升力的同时,保证较小的阻力,减少能量消耗,增加续航时间;能够在转向的同时,保证较小的阻力,以及产生较可观的灵活性,保证装置的超常规运动。
附图说明
图1为本发明飞行器初始状态时整体结构示意图;
图2为本发明飞行器初始状态时仿生小翼羽处于正面示意图;
图3为本发明飞行器初始状态时仿生小翼羽处于背面图示意图;
图4为本发明中飞行器起飞降落时整体结构示意图;
图5为本发明中飞行器起飞降落时仿生小翼羽处于正面示意图;
图6为本发明中飞行器起飞降落时仿生小翼羽处于背面示意图;
图7为本发明中飞行器平稳飞行时整体结构示意图;
图8为本发明中飞行器平稳飞行时仿生小翼羽处于正面示意图;
图9为本发明中飞行器平稳飞行时仿生小翼羽处于背面示意图;
图10为本发明中仿生小翼羽与仿生掌骨平面形成的夹角α示意图;
图11为本发明中仿生小翼羽与仿生掌骨侧面形成的夹角β示意图;
图12为本发明中仿生羽毛与仿生小翼羽连接的结构示意图;
图13为本发明中仿生掌骨根部的微型直线伺服驱动器与电源连接的示意图。
图中:1-第一上仿生肌腱;2-第二上仿生肌腱;3-仿生小翼羽;4-第一仿生羽毛;5-第二仿生羽毛;6-第三仿生羽毛;7-仿生掌骨;8-底部仿生肌腱;9-球铰;10-第一侧下方仿生肌腱;11-第一侧上方仿生肌腱;12-第二侧上方仿生肌腱;13-第二侧下方仿生肌腱;14-铰链;15-微型直线伺服驱动器;16-电源。
具体实施方式
下面结合附图对本发明作进一步的说明,但本发明所保护的范围不限于所述范围。
如图1-13所示,一种仿鸟类小翼羽的飞行器的仿生结构,包括仿生驱动机构、仿生小翼羽3、仿生羽毛系统及仿生掌骨7,仿生掌骨7上设有仿生小翼羽3,仿生小翼羽3与仿生掌骨7通过球铰9连接,能够保证仿生小翼羽3具有良好的转动性能和灵活性,仿生小翼羽3上设有仿生驱动机构,仿生驱动机构包括第一上仿生肌腱1、第二上仿生肌腱2、底部仿生肌腱8、第一侧上方仿生肌腱11、第二侧上方仿生肌腱12、第一侧下方仿生肌腱10及第二侧下方仿生肌腱13。
其中第一上仿生肌腱1的一端和第二上仿生肌腱2的一端对称设置于仿生小翼羽3的顶部;第一侧上方仿生肌腱11的一端和第二侧上方仿生肌腱12的一端对称设置于仿生小翼羽3的侧上方;第一侧下方仿生肌腱10的一端和第二侧下方仿生肌腱13的一端对称设置于仿生小翼羽3的侧下方;底部仿生肌腱8的一端设置于仿生小翼羽3的底部,本实施例中7个仿生肌腱均通过螺丝与仿生小翼羽3固定。
本发明的一种仿鸟类小翼羽的飞行器的仿生结构,包括一组微型直线伺服驱动器和电源16,本实施例中微型直线伺服驱动器15的个数为7个,且其均设置于仿生掌骨7内,第一上仿生肌腱1的另一端、第二上仿生肌腱2的另一端、底部仿生肌腱8的另一端、第一侧上方仿生肌腱11的另一端、第二侧上方仿生肌腱12的另一端、第一侧下方仿生肌腱10的另一端及第二侧下方仿生肌腱13的另一端均与仿生掌骨7对应的位置设有连接孔,且其均穿过对应的连接孔与其对应的微型直线伺服驱动器15连接,微型直线伺服驱动器15带动驱动仿生机构做直线运动,其中微型直线伺服驱动器15与电源16电性连接。
本发明的一种仿鸟类小翼羽的飞行器的仿生结构,仿生羽毛系统包括一组仿生羽毛,仿生羽毛包括第一仿生羽毛4、第二仿生羽毛5及第三仿生羽毛6,第二仿生羽毛5设置于仿生小翼羽3的尾尖,第一仿生羽毛4和第三仿生羽毛6分别设置于仿生小翼羽3的尾部的上方和下方,本实施例中仿生羽毛与仿生小翼羽3通过铰链14连接,能够保证仿生小翼羽3在收拢和打开时,仿生小翼羽3上的仿生羽毛能够做出相应的动作。
具体地,飞行器处于地面休息时
飞行器在地面休息时,仿生小翼羽3收拢,仿生驱动机构处于休息状态,且球铰9处在初始位置,仿生羽毛合拢,紧靠在仿生掌骨7附近,此时为初始状态,基本无功耗。
飞行器起飞、降落时
当飞行器在起飞与降落时,仿生小翼羽3张开,仿生小翼羽3上的仿生羽毛舒展,产生一个较大的升力面,且向后仰起,即仿生小翼羽3与仿生掌骨7平面之间存在一个角度使得小翼羽整体微微有立起状;小翼羽上的羽毛分开。
由于飞行器起飞降落,仿生小翼羽3需要张开,此时,第一侧上方仿生肌腱11、底部仿生肌腱8及第一侧下方仿生肌腱10分别处于放松状态,第一上仿生肌腱1和第二上仿生肌腱2收缩,连带仿生小翼羽3上的第一仿生羽毛4、第二仿生羽毛5及第三仿生羽毛6舒展张开、第二侧上方仿生肌腱12和第二侧下方仿生肌腱13收缩,连带使得仿生小翼羽3相对于仿生掌骨7平面产生一个后掠角α1以及与掌骨侧面产生一个上反角β1;由于产生了这两个向上的夹角,使得仿生小翼羽3整体呈现微微立起状,从而使得仿生掌骨7能够产生足够的升力,并能保证机翼的平衡;并产生足够大的阻力(减小阻力)使其用来降落减速或者升空加速。
飞行器在空中匀速飞行遇到湍流时
当飞行器在空中平稳飞行遇到湍流时,仿生小翼羽3张开,仿生小翼羽3上的仿生羽毛舒展,产生一个较大的升力面,但是仿生小翼羽3与仿生掌骨7平面之间并未存在夹角;仿生小翼羽3上的仿生羽毛分开。
由于鸟类平稳飞行,仿生小翼羽3需要张开,此时,底部仿生肌腱8、第一侧下方仿生肌腱10及第二侧下方仿生肌腱13分别处于放松状态,第一上仿生肌腱1和第二上仿生肌腱2收缩,连带仿生小翼羽3上的第一仿生羽毛4、第二仿生羽毛5及第三仿生羽毛6舒展张开、第一侧上方仿生肌腱11和第二侧上方仿生肌腱12收缩,连带使得仿生小翼羽3相对于仿生掌骨7平面只产生一个后掠角α2但是仿生掌骨7侧面与仿生小翼羽3处于同一个夹角上;使得仿生小翼羽3能够产生足够的升力的同时,飞行路线又不会受到影响;也能使得飞行阻力也比较小。
飞行器转动方向灵活性控制时
当飞行器在转向时,仿生小翼羽3张开,仿生小翼羽3上的仿生羽毛舒展,且可调节得仰起或者下俯,即仿生小翼羽3与仿生掌骨7平面之间存在一个角度。
由于飞行器转向,仿生小翼羽3需要张开,第一仿生羽毛4、第二仿生羽毛5及第三仿生羽毛6舒展,此时,第一侧上方仿生肌腱11、底部仿生肌腱8及第一侧下方仿生肌腱10分别处于放松状态,第一上仿生肌腱1和第二上仿生肌腱2处于收紧状态,连带仿生小翼羽上的第一仿生羽毛4、第二仿生羽毛5及第三仿生羽毛6处于舒展状态,第二侧上方仿生肌腱12和第二侧下方仿生肌腱13收缩,连带使得仿生小翼羽3相对于仿生掌骨7平面产生一个后掠角α3以及与仿生掌骨7侧面产生一个上反角β3,使得飞行器获得一个转向的力。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。