本实用新型涉及仿生翅膀领域,尤其涉及一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀。
背景技术:
目前,仿真饰品和玩具等领域已广泛采用鸟类和昆虫等带有翅膀的动物作为展示原型,且在商业销售、表演舞台、娱乐设施等场景得到普遍应用。为了达到更佳吸引用户的效果,对此类饰品和玩具的展现力和逼真度要求也不断提高。翅膀作为此类产品焦点,其结构设计和制作工艺水平直接决定产品的展现效果和档次高低。
大部分带翅膀的动物饰品和玩具为纯静态结构,其展现力大打折扣,装饰和娱乐效果差。市面上少量产品采用动态翅膀结构,但往往结构复杂,稳定性不强,翅膀动态效果不佳。
因此,有必要提供一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀解决上述技术问题。
技术实现要素:
本实用新型提供一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀,解决了翅膀展示只能进行静态装饰并且结构单一的问题。
为解决上述技术问题,本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀,包括:主体结构,所述主体结构包括前体外壳、头部外壳和嘴部结构;
总固定板,所述总固定板固定于所述主体结构的一侧;
尾板,所述尾板设置于所述总固定板的一侧;
第一连接装置,所述第一连接装置包括两个外翅齿轮第一连接杆,两个所述外翅齿轮第一连接杆上均转动连接有外翅齿轮第二连接杆,所述外翅齿轮第二连接杆上转动连接有外翅齿轮第三连接杆,所述外翅齿轮第三连接杆上转动连接有外翅齿轮第四连接杆,两个所述外翅齿轮第四连接杆的一端均转动连接有外翅横杆,两个外翅横杆的一端均转动连接有内翅横杆,两个所述内翅横杆的一端均转动连接有内翅齿轮连接杆;
翅膀结构,所述翅膀结构固定于所述第一连接装置上,所述翅膀结构包括两个内翅板和两个外翅板,两个所述内翅板分别与两个所述内翅横杆固定连接,两个所述外翅板分别与两个所述外翅横杆固定连接;
转动装置,所述转动装置设置于所述总固定板的一侧,所述转动装置包括驱动电机,所述驱动电机的输出端固定连接有第一驱动齿轮,所述总固定板的一侧转动连接有两个翅膀传动齿轮,所述第一驱动齿轮与所述翅膀传动齿轮啮合,两个所述内翅齿轮连接杆分别与两个所述翅膀传动齿轮转动连接。
优选的,两个所述外翅齿轮第一连接杆分别与两个所述翅膀传动齿轮固定连接,两个所述外翅齿轮第三连接杆与所述总固定板转动连接。
优选的,两个所述内翅板分别和两个所述外翅板转动连接。
优选的,还包括:第二连接装置,所述第二连接装置设置于所述总固定板的一侧,所述第二连接装置包括第一翅膀驱动电机,所述第一翅膀驱动电机的输出端固定连接有第二驱动齿轮,所述总固定板上转动连接有两个第一翅膀传动齿轮,两个所述第一翅膀传动齿轮上均转动连接有翅膀齿轮连接杆,两个所述翅膀齿轮连接杆的一端均转动连接有第一造型翅膀,所述第一翅膀传动齿轮上啮合有第二传动齿轮,所述第二驱动齿轮上啮合有第一传动齿轮,所述第一传动齿轮和所述第二传动齿轮通过转动杆固定连接;
第一尾部装置,所述第一尾部装置设置于所述尾板的一侧,所述第一尾部装置包括尾部电机盒,所述尾部电机盒内设置有尾巴驱动电机。
优选的,所述总固定板的一侧固定连接有支撑连杆,所述总固定板的两侧均固定连接有支撑连杆,位于同一侧的所述支撑连杆的分别与所述尾部电机盒和主体结构固定连接。
优选的,还包括:第三连接装置,所述第三连接装置设置于所述总固定板的一侧,所述第三连接装置包括第二翅膀驱动电机,所述第二翅膀驱动电机的输出端固定连接有第三驱动齿轮,所述总固定板上设置有固定轴安装槽,所述固定轴安装槽的内表面固定连接有固定轴,所述固定轴上转动连接有传动杆,所述传动杆上固定连接有第二翅膀传动齿轮,所述第二翅膀传动齿轮与所述第三驱动齿轮啮合,所述传动杆的两端均传动连接有第二造型翅膀,两个所述第二造型翅膀固定连接有翅膀固定轴;
第二尾部装置,所述第二尾部装置设置于所述尾板的一侧,所述第二尾部装置包括尾巴俯仰驱动电机,所述尾巴俯仰驱动电机的一侧设置有尾巴滚转驱动电机,所述尾巴滚转驱动电机与所述尾板转动连接。
优选的,所述总固定板上设置有尾巴俯仰驱动电机安装槽和翅膀驱动电机安装槽,所述尾巴俯仰驱动电机固定在所述尾巴俯仰驱动电机安装槽内,所述第二翅膀驱动电机固定在翅膀驱动电机安装槽内。
与相关技术相比较,本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀具有如下有益效果:
(1)、本实用新型提供一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀,通过总固定板上的转动装置带动第一连接装置转动,从而使翅膀结构转动,配合主体结构和尾板使该装置转动,从而实现对飞行动物的模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
(2)、本实用新型提供一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀,通过第二连接装置带动第一造型翅膀在总固定板上转动,第一尾部装置带动尾板运动,实现对不同的飞行动物的模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
(3)、本实用新型提供一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀,通过第三连接装置使总固定板上的第二造型翅膀转动,通过第二尾部装置带动尾板转动,实现对不同的飞行动物进行模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
附图说明
图1为本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的第一实施例的结构示意图;
图2为图1所示的翅膀运动结构正面图;
图3为图1所示的翅膀运动结构背面图;
图4为图1所示的总固定板的结构示意图;
图5为图1所示的背部外壳的结构示意图;
图6为本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的第二实施例的结构示意图;
图7为图6所示的翅膀运动结构正面图;
图8为图6所示的支撑框架图;
图9为图6所示的尾巴运动结构图;
图10为图6所示的总固定板的结构示意图;
图11为图7所示的a处的放大图;
图12为本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的第三实施例的结构示意图;
图13为图12所示的翅膀运动结构图;
图14为图12所示的尾巴运动结构图;
图15为图12所示的造型身体结构图;
图16为图13所示的b处的放大图。
图中标号:1、主体结构,11、前体外壳,12、头部外壳,13、嘴部结构,2、总固定板,21、翅膀固定轴,22、尾巴俯仰驱动电机安装槽,23、翅膀驱动电机安装槽,24、固定轴安装槽,3、尾板,4、第一连接装置,41、外翅齿轮第一连接杆,42、外翅齿轮第二连接杆,43、外翅齿轮第三连接杆,44、外翅齿轮第四连接杆,45、内翅齿轮连接杆,46、内翅横杆,47、外翅横杆,5、翅膀结构,51、内翅板,52、外翅板,6、转动装置,61、驱动电机,62、第一驱动齿轮,63、翅膀传动齿轮,7、第二连接装置,71、第一翅膀驱动电机,72、第二驱动齿轮,73、第一传动齿轮,74、第二传动齿轮,75、第一翅膀传动齿轮,76、翅膀齿轮连接杆,77、第一造型翅膀,78、转动杆,8、第一尾部装置,81、尾部电机盒,82、尾巴驱动电机,83、支撑连杆,9、第三连接装置,91、第二翅膀驱动电机,92、第三驱动齿轮,93、第二翅膀传动齿轮,94、传动杆,95、固定轴,96、第二造型翅膀,10、第二尾部装置,101、尾巴俯仰驱动电机,102、尾巴滚转驱动电机。
具体实施方式
下面结合附图和实施方式对本实用新型作进一步说明。
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
第一实施例:
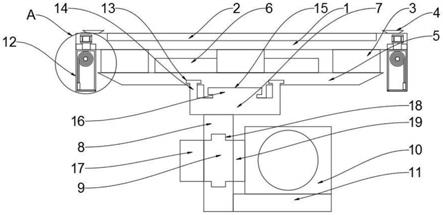
请结合参阅图1-图5,其中,图1为本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的第一实施例的结构示意图;图2为图1所示的翅膀运动结构正面图;图3为图1所示的翅膀运动结构背面图;图4为图1所示的总固定板的结构示意图;图5为图1所示的背部外壳的结构示意图。基于齿轮机构的扑翼式一体化机械动态仿生翅膀包括:主体结构1,所述主体结构1包括前体外壳11、头部外壳12和嘴部结构13;
总固定板2,所述总固定板2固定于所述主体结构1的一侧;
尾板3,所述尾板3设置于所述总固定板2的一侧;
第一连接装置4,所述第一连接装置4包括两个外翅齿轮第一连接杆41,两个所述外翅齿轮第一连接杆41上均转动连接有外翅齿轮第二连接杆42,所述外翅齿轮第二连接杆42上转动连接有外翅齿轮第三连接杆43,所述外翅齿轮第三连接杆43上转动连接有外翅齿轮第四连接杆44,两个所述外翅齿轮第四连接杆44的一端均转动连接有外翅横杆47,两个外翅横杆47的一端均转动连接有内翅横杆46,两个所述内翅横杆46的一端均转动连接有内翅齿轮连接杆45;
翅膀结构5,所述翅膀结构5固定于所述第一连接装置4上,所述翅膀结构5包括两个内翅板51和两个外翅板52,两个所述内翅板51分别与两个所述内翅横杆46固定连接,两个所述外翅板52分别与两个所述外翅横杆47固定连接;
转动装置6,所述转动装置6设置于所述总固定板2的一侧,所述转动装置6包括驱动电机61,所述驱动电机61的输出端固定连接有第一驱动齿轮62,所述总固定板2的一侧转动连接有两个翅膀传动齿轮63,所述第一驱动齿轮62与所述翅膀传动齿轮63啮合,两个所述内翅齿轮连接杆45分别与两个所述翅膀传动齿轮63转动连接。
通过总固定板2上的转动装置6带动第一连接装置4转动,从而使翅膀结构5转动,配合主体结构1和尾板3使该装置转动,从而实现对飞行动物的模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
两个所述外翅齿轮第一连接杆41分别与两个所述翅膀传动齿轮63固定连接,两个所述外翅齿轮第三连接杆43与所述总固定板2转动连接。
驱动电机61带动第一驱动齿轮62转动,从而带动两个翅膀传动齿轮63转动,从而带动内翅齿轮连接杆45和外翅齿轮第一连接杆41转动,从而带动外翅齿轮第二连接杆42转动,使外翅齿轮第三连接杆43同步转动。
两个所述内翅板51分别和两个所述外翅板52转动连接。
通过外翅板52和内翅板51转动连接,当内翅板51转动时带动外翅板52的一侧转动,从而实现对翅膀进行机械仿生。
本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的工作原理如下:
首先通过启动驱动电机61使第一驱动齿轮62转动,从而带动两个翅膀传动齿轮63转动,从而带动内翅齿轮连接杆45和外翅齿轮第一连接杆41转动,从而带动外翅齿轮第二连接杆42转动,使外翅齿轮第三连接杆43同步转动,从而带动外翅齿轮第四连接杆44转动,内翅齿轮连接杆45带动内翅横杆46转动,外翅齿轮第四连接杆44带动外翅横杆47转动,从而带动内翅板51和外翅板52转动,实现对一种飞行动物的机械模仿。
与相关技术相比较,本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀具有如下有益效果:
通过总固定板2上的转动装置6带动第一连接装置4转动,从而使翅膀结构5转动,配合主体结构1和尾板3使该装置转动,从而实现对飞行动物的模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
第二实施例:
请参阅图6-图11,基于本申请的第一实施例提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀,本申请的第二实施例提出另一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
具体的,本申请的第二实施例提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的不同之处在于,基于齿轮机构的扑翼式一体化机械动态仿生翅膀,还包括:第二连接装置7,所述第二连接装置7设置于所述总固定板2的一侧,所述第二连接装置7包括第一翅膀驱动电机71,所述第一翅膀驱动电机71的输出端固定连接有第二驱动齿轮72,所述总固定板2上转动连接有两个第一翅膀传动齿轮75,两个所述第一翅膀传动齿轮75上均转动连接有翅膀齿轮连接杆76,两个所述翅膀齿轮连接杆76的一端均转动连接有第一造型翅膀77,所述第一翅膀传动齿轮75上啮合有第二传动齿轮74,所述第二驱动齿轮72上啮合有第一传动齿轮73,所述第一传动齿轮73和所述第二传动齿轮74通过转动杆78固定连接;
第一尾部装置8,所述第一尾部装置8设置于所述尾板3的一侧,所述第一尾部装置8包括尾部电机盒81,所述尾部电机盒81内设置有尾巴驱动电机82。
通过第二连接装置7带动第一造型翅膀77在总固定板2上转动,第一尾部装置8带动尾板3运动,实现对不同的飞行动物的模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
所述总固定板2的两侧均固定连接有支撑连杆83,位于同一侧的所述支撑连杆83的分别与所述尾部电机盒81和主体结构1固定连接。
通过支撑连杆83对总固定板2和尾板3之间进行固定连接,提高主体结构1、总固定板2和尾板3之间的稳定性。
本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的工作原理如下:
通过第一翅膀驱动电机71带动第二驱动齿轮72转动,从而带动第一传动齿轮73转动,通过转动杆78带动第二传动齿轮74转动,使两个第一翅膀传动齿轮75转动,从而带动翅膀齿轮连接杆76在第一翅膀传动齿轮75上移动,使第一造型翅膀77转动,从而实现对其他的飞行动物进行机械模仿,尾部电机盒81内的尾巴驱动电机82带动尾板3摆动,增加模仿的逼真性,支撑连杆83对尾板3和总固定板2进行连接,提高稳定性。
与相关技术相比较,本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀具有如下有益效果:
通过第二连接装置7带动第一造型翅膀77在总固定板2上转动,第一尾部装置8带动尾板3运动,实现对不同的飞行动物的模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
第三实施例:
请参阅图12-图16,基于本申请的第一实施例提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀,本申请的第三实施例提出另一种基于齿轮机构的扑翼式一体化机械动态仿生翅膀。第三实施例仅仅是第一实施例优选的方式,第三实施例的实施对第一实施例的单独实施不会造成影响。
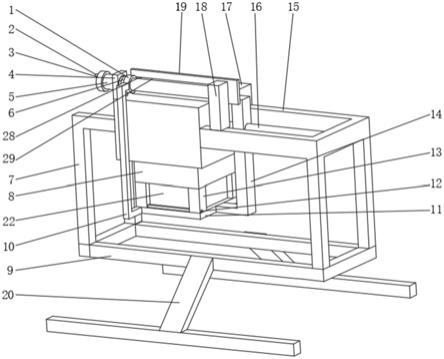
具体的,本申请的第三实施例提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的不同之处在于,基于齿轮机构的扑翼式一体化机械动态仿生翅膀,还包括:第三连接装置9,所述第三连接装置9设置于所述总固定板2的一侧,所述第三连接装置9包括第二翅膀驱动电机91,所述第二翅膀驱动电机91的输出端固定连接有第三驱动齿轮92,所述总固定板2上设置有固定轴安装槽24,所述固定轴安装槽24的内表面固定连接有固定轴95,所述固定轴95上转动连接有传动杆94,所述传动杆94上固定连接有第二翅膀传动齿轮93,所述第二翅膀传动齿轮93与所述第三驱动齿轮92啮合,所述传动杆94的两端均传动连接有第二造型翅膀96,两个所述第二造型翅膀96固定连接有翅膀固定轴21;
第二尾部装置10,所述第二尾部装置10设置于所述尾板3的一侧,所述第二尾部装置10包括尾巴俯仰驱动电机101,所述尾巴俯仰驱动电机101的一侧设置有尾巴滚转驱动电机102,所述尾巴滚转驱动电机102与所述尾板3转动连接。
通过第三连接装置9使总固定板2上的第二造型翅膀96转动,通过第二尾部装置10带动尾板3转动,实现对不同的飞行动物进行模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
所述总固定板2上设置有尾巴俯仰驱动电机安装槽22和翅膀驱动电机安装槽23,所述尾巴俯仰驱动电机101固定在所述尾巴俯仰驱动电机安装槽22内,所述第二翅膀驱动电机91固定在翅膀驱动电机安装槽23内。
通过尾巴俯仰驱动电机安装槽22对尾巴俯仰驱动电机101进行限位,提高尾巴俯仰驱动电机101工作时的稳定性,翅膀驱动电机安装槽23对第一翅膀驱动电机71进行限位,提高第一翅膀驱动电机71工作时的稳定性。
本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀的工作原理如下:
通过第二翅膀驱动电机91带动第三驱动齿轮92转动,从而带动第二翅膀传动齿轮93转动,使总固定板2上固定轴安装槽24内的固定轴95上的传动杆94转动,使第二造型翅膀96转动,从而实现仿生翅膀的转动,通过尾巴俯仰驱动电机101带动尾板3上下摆动,尾巴滚转驱动电机102带动尾板3转动,提高该装置的逼真性。
与相关技术相比较,本实用新型提供的基于齿轮机构的扑翼式一体化机械动态仿生翅膀具有如下有益效果:
通过第三连接装置9使总固定板2上的第二造型翅膀96转动,通过第二尾部装置10带动尾板3转动,实现对不同的飞行动物进行模仿,在展示过程中可以帮助被展示的人快速理解,结构多样,增加了互动体验,提高了展示的效果,帮助快速对飞行动物的结构进行理解。
以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。