技术特征:
1.一种小型六自由度甲板运动模拟系统,其特征在于,包括:
无人车底盘(2);
六自由度摇摆平台机构,设置于无人车底盘(2)上,用于甲板运动的模拟;
动平台自主起降引导系统(4),设置于六自由度摇摆平台机构上,具有无人机自主起降引导功能;
控制模块(3),设置于无人车底盘(2)上,用于控制六自由度摇摆平台机构的摇摆姿态和周期及无人车底盘(2)的速度和转向,并将六自由度摇摆平台机构和无人车底盘(2)的状态信息发送给上位机系统(5);
上位机系统(5),用于接收控制模块(3)发送的六自由度摇摆平台机构和无人车底盘(2)的状态信息,并且向六自由度摇摆平台机构和无人车底盘(2)发送指令。
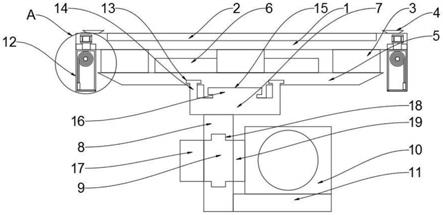
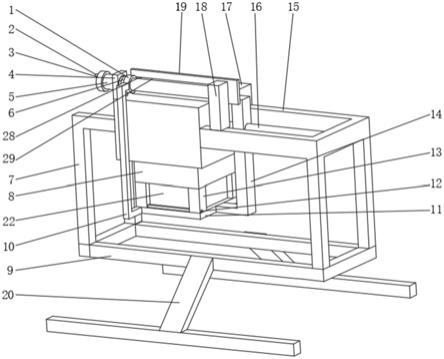
2.根据权利要求1所述的小型六自由度甲板运动模拟系统,其特征在于,所述六自由度摇摆平台机构包括六自由度摇摆平台(1)、安装底板(8)及设置于六自由度摇摆平台(1)和安装底板(8)之间的三组直线驱动机构,其中安装底板(8)与所述无人车底盘(2)连接,所述动平台自主起降引导系统(4)设置于六自由度摇摆平台(1)上;三组直线驱动机构用于驱动六自由度摇摆平台(1)进行六自由度运动。
3.根据权利要求2所述的小型六自由度甲板运动模拟系统,其特征在于,所述六自由度摇摆平台(1)采用方形结构的铁板制成。
4.根据权利要求2所述的小型六自由度甲板运动模拟系统,其特征在于,三组所述直线驱动机构沿周向均布。
5.根据权利要求2所述的小型六自由度甲板运动模拟系统,其特征在于,所述直线驱动机构包括相互连接的伺服电机(6)和电推缸(7),其中伺服电机(6)与所述控制模块(3)电连接;所述电推缸(7)的底部通过下万向关节(10)与所述安装底板(8)连接,所述电推缸(7)的输出端通过上万向关节(9)与所述六自由度摇摆平台(1)连接。
6.根据权利要求5所述的小型六自由度甲板运动模拟系统,其特征在于,所述控制模块(3)包括控制器、电机驱动器及电源单元,其中电机驱动器与所述伺服电机(6)连接;所述控制器用于无人车底盘(2)的速度和转向控制。
7.根据权利要求1所述的小型六自由度甲板运动模拟系统,其特征在于,所述无人车底盘(2)包括车体框架(21)及设置于车体框架(21)底部的两个转向轮(22)及两个驱动轮(23);所述控制模块(3)设置于所述车体框架(21)的底部。
8.根据权利要求1所述的小型六自由度甲板运动模拟系统,其特征在于,所述上位机系统(5)包括上位机软件。
技术总结
本发明属于无人机运动甲板起降引导技术领域,具体的说是一种小型六自由度甲板运动模拟系统。包括无人车底盘、控制模块、六自由度摇摆平台机构、动平台自主起降引导系统及上位机系统,其中六自由度摇摆平台机构设置于无人车底盘上;动平台自主起降引导系统设置于六自由度摇摆平台机构上;控制模块设置于无人车底盘上,用于控制六自由度摇摆平台机构的摇摆姿态和周期及无人车底盘的速度和转向;上位机系统用于接收控制模块发送的六自由度摇摆平台机构和无人车底盘的状态信息,并向六自由度摇摆平台机构和无人车底盘发送指令。本发明可以在陆地上方便的实现海面或其它水面的船甲板起降引导试验,可以大大降低前期验证性飞行试验。
技术研发人员:何玉庆;谷丰;狄春雷;于利;李德才;宋明
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:2021.06.03
技术公布日:2021.08.27
本文用于企业家、创业者技术爱好者查询,结果仅供参考。