1.本发明涉及飞行器技术领域,尤其是涉及一种电机、具有所述电机的动力装置、具有所述电机的动力套装、以及具有所述动力装置或所述动力套装的无人飞行器。
背景技术:
2.无人飞行器是一种处在迅速发展中的飞行装置,其具有机动灵活、反应快速、无人飞行、操作要求低的优点。目前,无人飞行器的使用范围已经扩宽到军事、科研、民用三大领域,具体可在电力、通信、气象、农业、海洋、勘探、摄影、防灾减灾、农作物估产、农业植保、缉毒缉私、边境巡逻、治安反恐等领域执行各项任务。一般地,无人飞行器是通过电机驱动螺旋桨转动而产生动力来完成空间飞行以执行各项任务。
3.然而,无人机用户,特别是diy用户,在组装的无人飞行器时,需要将买来的动力系统的配件重新组装,例如,将电机本体与电子调速器的连接导线进行接线,并且固定在一起,导致接线复杂,使得用户在组装无人飞行器时费时费力。
技术实现要素:
4.本发明的实施方式旨在至少解决现有技术中存在的技术问题之一。为此,本发明的实施方式需要提供一种电机、具有所述电机的动力装置、具有所述电机的动力套装、以及具有所述动力装置或所述动力套装的无人飞行器。
5.第一方面,本发明提供一种电机,所述电机包括:电机本体,所述电机本体包括基座、固定在所述基座上的定子、以及罩设在所述定子及所述基座外的转子,所述转子包括相背的第一端及第二端,所述基座位于所述第一端;盖体,所述盖体与所述基座结合并罩设所述第一端;底座,所述底座与所述盖体结合并与所述盖体共同形成一收容腔,所述底座与所述电机本体分别位于所述盖体相背的两侧;及电子调速器,所述电子调速器安装在所述底座上并收容于所述收容腔内,所述电机本体通过导线与所述电子调速器电连接。
6.第二方面,本发明提供一种动力装置,包括螺旋桨,所述动力装置还包括一种电机,所述电机包括:电机本体,所述电机本体包括基座、固定在所述基座上的定子、以及罩设在所述定子及所述基座外的转子,所述转子包括相背的第一端及第二端,所述基座位于所述第一端;盖体,所述盖体与所述基座结合并罩设所述第一端;底座,所述底座与所述盖体结合并与所述盖体共同形成一收容腔,所述底座与所述电机本体分别位于所述盖体相背的两侧;及电子调速器,所述电子调速器安装在所述底座上并收容于所述收容腔内,所述电机本体通过导线与所述电子调速器电连接;所述螺旋桨装设在所述电机上,所述电机能够驱动所述螺旋桨转动。
7.第三方面,本发明提供一种无人飞行器的动力套装,所述动力套装包括电机、第一密封件及连接臂,所述电机包括:电机本体,所述电机本体包括基座、固定在所述基座上的定子、以及罩设在所述定子及所述基座外的转子,所述转子包括相背的第一端及第二端,所述基座位于所述第一端;盖体,所述盖体与所述基座结合并罩设所述第一端;底座,所述底
座与所述盖体结合并与所述盖体共同形成一收容腔,所述底座与所述电机本体分别位于所述盖体相背的两侧;及电子调速器,所述电子调速器安装在所述底座上并收容于所述收容腔内,所述电机本体通过导线与所述电子调速器电连接;所述第一密封件收容在所述收容腔内并密封所述底座与所述盖体之间的空隙,所述连接臂与所述底座固定连接,并用于与所述无人飞行器的机臂可拆卸连接。
8.第三方面,本发明还提供一种无人飞行器的动力套装,所述动力套装包括:电机安装座,包括底座以及与所述底座固定连接的连接臂,所述底座设有凹槽,所述连接臂用于与无人飞行器的机臂可拆卸连接;电机,安装在所述底座上,所述电机的底部对应所述凹槽的开口设置,并且所述电机与所述收容槽共同配合,形成一个收容腔;电子调速器,收容在所述收容腔内,所述电子调速器与所述电机电连接,用于驱动所述电机转动;及第一密封件,设置在在所述收容腔的开口处,用于密封所述容置槽的开口周缘与所述电机的底部之间的间隙。
9.第四方面,本发明还提供一种无人飞行器,包括机身,所述无人飞行器还包括动力装置或动力套装;所述动力装置,包括螺旋桨和电机;所述动力套装包括电机、第一密封件及连接臂;所述电机包括:电机本体,所述电机本体包括基座、固定在所述基座上的定子、以及罩设在所述定子及所述基座外的转子,所述转子包括相背的第一端及第二端,所述基座位于所述第一端;盖体,所述盖体与所述基座结合并罩设所述第一端;底座,所述底座与所述盖体结合并与所述盖体共同形成一收容腔,所述底座与所述电机本体分别位于所述盖体相背的两侧;及电子调速器,所述电子调速器安装在所述底座上并收容于所述收容腔内,所述电机本体通过导线与所述电子调速器电连接;所述螺旋桨装设在所述电机上,所述电机能够驱动所述螺旋桨转动;所述第一密封件收容在所述收容腔内并密封所述底座与所述盖体之间的空隙,所述连接臂与所述底座固定连接,并用于与所述无人飞行器的机臂可拆卸连接;所述电机设置于所述机身上以为所述无人飞行器提供飞行动力。
10.本发明实施方式提供的无人飞行器、动力套装、动力装置及电机将电机本体与电子调速器通过导线电性连接并集成为一个单独模块,可以作为一个整体件进行安装或拆卸,不仅简化了布线,而且还提高了无人飞行器的组装效率。
11.在某些实施方式中,所述无人飞行器为农业无人机,包括挂载在机身上的水箱以及通过管道与所述水箱连通的喷头。
12.本发明的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实施方式的实践了解到。
附图说明
13.本发明的实施方式的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
14.图1为本发明某些实施方式的无人飞行器的立体示意图。
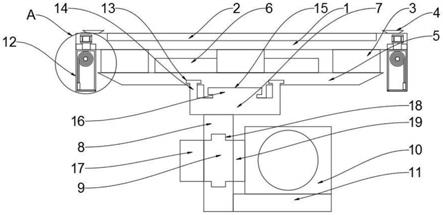
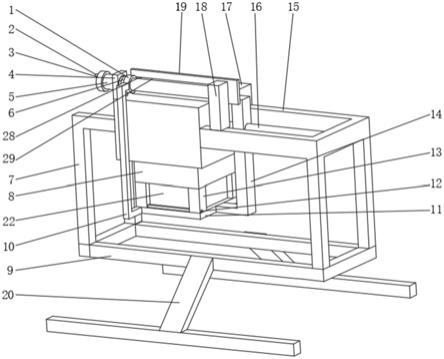
15.图2为图1中无人飞行器的电机的立体组装示意图。
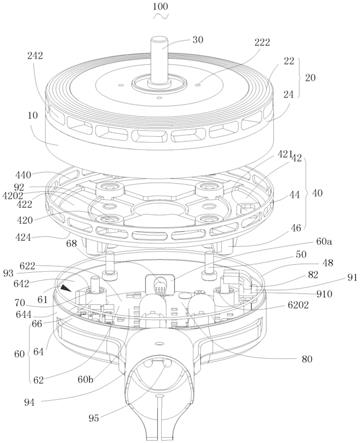
16.图3为图2中电机的立体分解示意图。
17.图4为图2中电机另一视角的立体分解示意图。
18.图5为图2中电机又一视角的立体分解示意图。
具体实施方式
19.下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
20.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
21.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
22.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
23.下文的公开提供了许多不同的实施方式或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本发明。此外,本发明可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本发明提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
24.请参阅图1,本发明实施方式提供的无人飞行器500包括机身510、自机身510延伸的机臂520、以及设置于机臂520上的动力装置300。本发明实施方式中,无人飞行器500为八旋翼飞行器,即为具有八个动力组件300的飞行器。可以理解,无人飞行器500也可以为四旋翼飞行器、六旋翼飞行器、十二旋翼飞行器等,甚至,无人飞行器500可以为单旋翼飞行器;另外,在某些实施方式中,无人飞行器500可以为固定翼
‑
旋翼混合的飞行器。无人飞行器500可为农业无人机,可用于农业植保,例如给植物喷洒农药、营养液等,包括挂载在机身上的水箱以及通过管道与所述水箱连通的喷头;无人飞行器500也可以用于搭载摄影机、照相机等电子装置(图未示出)执行巡逻、勘探等任务。
25.每个动力装置300均包括电机100以及装设在电机100上的螺旋桨200。电机100能够驱动螺旋桨200转动以为无人飞行器500提供飞行动力,从而带动无人飞行器500飞行。
26.请参阅图2,本实施方式中,电机100为无刷电机,包括电机本体10、罩体20、转轴30、盖体40、多个锁紧件50、底座60、锁固件70、及电子调速器80。罩体20罩设在电机本体10的上方,盖体40罩设在电机本体10的下方,转轴30穿设在罩体20及电机本体10内,底座50承载住电机本体10、罩体20、转轴30、盖体40、锁紧件50、锁固件70、及电子调速器70。
27.具体地,请一并参阅图3至图5,电机本体10包括基座12、固定在基座12上的定子14、以及罩设在定子14及基座12外的转子16。
28.基座12包括相背的顶面122及底面124。底面124开设有多个第一安装孔1240。
29.定子14固定在顶面122上。定子14包括铁芯142及设置于铁芯142上的线圈(图未示)。铁芯142包括套设部1422及多个支撑部1424。套设部1422大致为圆环形的柱体结构,设置在顶面122上并与基座12止转连接。每个支撑部1424大致呈板状,多个支撑部1424自套设部1422的外圆周壁向外延伸,并沿套设部1422的周向间隔排列设置,呈现出轮辐发散状。换言之,每个支撑部1424的一侧固定在套设部142的外圆周壁,另一侧沿套设部142的径向朝背离套设部142的方向延伸。支撑部1424用于支撑线圈,线圈可以为多个,每个线圈绕设在一个支撑部1424上。
30.转子16包括磁轭162及设置于磁轭162内的多个磁体164。磁轭162大致呈圆柱筒状,可转动地罩设在定子14及基座12外周,多个磁体164固定地设置在磁轭162的内壁,并沿磁轭162的周向间隔排列设置。每个磁体16大致呈弧形片状结构以与磁轭162的内壁贴合,当然磁体16也可呈其他形状的结构,例如可以是长方体结构、椭圆体结构等等。转子16包括相背的第一端166及第二端168,基座12位于第一端166。
31.罩体20连接在转子16的第二端168上,其用于装设螺旋桨200。具体地,罩体20包括顶壁22及自顶壁22延伸的挡壁24。顶壁22大致呈圆形板状,其上贯通开设有多个定位孔222。多个定位孔221彼此间隔设置,用于对所述无人飞行器500的螺旋桨200进行固定定位。挡壁24与第二端168连接,挡壁24大致呈圆柱状并环绕顶壁22的外缘形成,且大致垂直于顶壁22并朝向磁轭162延伸。挡壁24上贯通开设有多个风孔242,在本实施方式中,风孔242贯通挡壁24并大致沿罩体20的径向延伸,直至与电机100的内腔相连通。在本实施方式中,风孔242的数量为多个,多个风孔242沿挡壁24的周向排列,并彼此间隔设置。风孔242用以允许空气流通,从而利于电机100的散热。
32.转轴30大致呈圆柱杆状,转轴30的一端插设在顶壁22并与顶壁22止转连接,转轴30的另一端能够转动地插设在基座12内。当电机100通电作业时,转子16带动罩体20及转轴30相对定子14及基座12转动。进一步地,转轴30的末端凸伸出罩体20的顶壁22的表面,其用于装设螺旋桨200,并驱动螺旋桨200转动。可以理解,转轴30可以不局限于上述的设置方式,还可以是:例如,转轴30的一端可以插设在基座12中并与基座12止转连接,另一端可转动地穿设于罩体20的顶壁22,使转子16、罩体20及螺旋桨200能够绕转轴30的轴线相对于定子14和基座12转动即可。
33.盖体40与基座12结合并罩设在第一端166。具体地,盖体40包括底板42及自底板42延伸的侧板44。底板42大致呈圆形板状,包括相背的内表面422及外表面424,内表面422较外表面444更接近基座12,外表面424开设有多个第一结合孔428。底板42上开设有贯穿内表面422及外表面424的多个第二安装孔420及一个通孔421,多个第二安装孔420与多个第一安装孔1240对应,通孔421与多个第二安装孔420间隔。。侧板44大致呈圆柱状并环绕底板42
的外缘形成,且大致垂直于底板42并朝向基座12延伸。侧板44上开设有多个散热通孔440,在本实施方式中,散热通孔440贯通侧板44并大致沿盖体40的径向延伸,直至与电机100的内腔相连通。在本实施方式中,散热通孔440的数量为多个,多个散热通孔440沿挡壁24的周向排列,并彼此间隔设置。散热通孔440用以允许空气流通,从而利于电机100的散热。
34.锁紧件50穿过多个第二安装孔420与第一安装孔1240配合以使盖体40与基座12结合,侧板44罩住第一端166。本实施方式中,锁紧件50为锁紧螺钉,在其他实施方式中,盖体40与基座12的结合可以采用螺纹连接、卡合、胶合、焊接方式中的任意一种或多种相组合的方式来实现。
35.底座60与盖体40结合并与盖体40共同形成一收容腔61,底座60与电机本体10分别位于盖体40相背的两侧。具体地,底座60包括底壁62及自底壁62延伸的侧壁64。底壁62大致呈圆形板状,包括相背的上表面622及下表面624,上表面622较下表面624更接近盖体40,换句话说,上表面622位于收容腔61的内部,下表面624位于收容腔61的外部。底壁62上开设有贯穿上表面622较下表面624的多个第二结合孔620,多个第二结合孔620与多个第一结合孔428对应。侧壁64大致呈圆柱状并环绕底壁62的外缘形成,且大致垂直于底壁62并朝向盖体40延伸。侧壁64包括相背的内侧面642及外侧面644,内侧面642位于收容腔61的内部,外侧面644位于收容腔61的外部。
36.锁固件70穿过多个第二结合孔620与多个第一结合孔428配合以使底座60与盖体40结合,侧壁64罩住外表面424。本实施方式中,锁固件70为锁紧螺钉,在其他实施方式中,底座60与盖体40的结合可以采用螺纹连接、卡合、胶合、焊接方式中的任意一种或多种相组合的方式来实现。
37.电子调速器80安装在底座60上并收容于收容腔61内,具体地,电子调速器80固定在底壁62的上表面622上,电子调速器80可以通过胶合、焊接、螺纹连接、卡合方式中的任意一种或多种组合固定在上表面622上。电机本体10通过导线82与电子调速器80电连接。具体地,导线82自电机本体10(定子14和/或转子16)延伸并贯穿通孔421进入收容腔61后与电子调速器80电性连接。在本实施方式中,导线82是焊接在电子调速器80上的。
38.本发明实施方式提供的无人飞行器500将电机100的电机本体10通过导线82与设置在底座60的电子调速器80电性连接,并集成为一个单独模块,可以作为一个整体件进行安装或拆卸,不仅简化了布线,而且还提高了无人飞行器500的组装效率。
39.在某些实施方式中,进一步地,收容腔61为密封腔,此密封腔61由底板42、底壁62、侧壁64共同围成。
40.在某些实施方式中,进一步地,电机100还包括第一密封件90,此时,底板42的外表面424开设有环形的收容槽426,环形的收容槽426与多个第一结合孔428不连通。第一密封件90收容在收容槽426内以密封底座60与盖体40之间的空隙。第一密封件90可以是密封圈、密封胶、密封油中的任意一种。由于设置了第一密封件90,能够防止无人飞行器500在雨天或湿度较大的环境飞行、或者是在执行喷洒任务时,水或喷洒液从底板42与底座60的结合处渗入收容腔61而损坏电子调速器80,提高了电机100的密封性能,从而实现了电机100的防水功能。
41.在某些实施方式中,进一步地,电机100还包括第二密封件91,第二密封件91开设有与导线82配合的走线孔910,第二密封件91安装在通孔421内,导线82自电机本体10延伸
并贯穿走线孔910并与电子调速器80连接。第二密封件91可以是密封圈、密封胶、密封油中的任意一种。由于设置了第二密封件91,能够防止无人飞行器500在雨天或湿度较大的环境飞行、或者是在执行喷洒任务时,水或喷洒液从底板42渗入收容腔61而损坏电子调速器80,提高了电机100的密封性能,从而实现了电机100的防水功能。
42.在某些实施方式中,进一步地,电机100还包括第三密封件92,此时,每个第二安装孔420为阶梯孔并包括一阶梯面4202,第三密封件92收容在第二安装孔420内并承载在阶梯面4202上,第三密封件92套设在锁紧件50上。第三密封件92可以是密封圈、密封胶、密封油中的任意一种。可以理解,每个第二安装孔420为阶梯孔,也可包括相背的两个阶梯面4202,第三密封件92可以承载在其中一个阶梯面4202上,也可以同时承载在两个阶梯面4202上以实现双面防水。由于设置了第三密封件92,能够防止无人飞行器500在雨天或湿度较大的环境飞行、或者是在执行喷洒任务时,水或喷洒液从底板42渗入收容腔61而损坏电子调速器80,提高了电机100的密封性能,从而实现了电机100的防水功能。
43.在某些实施方式中,进一步地,电机100还包括第四密封件93,此时,每个第二结合孔620为阶梯孔并包括一阶梯面6202,第四密封件93收容在第二结合孔620内并承载在阶梯面6202上,第四密封件93套设在锁紧件50上。第四密封件93可以是密封圈、密封胶、密封油中的任意一种。可以理解,每个第二结合孔620为阶梯孔,也可包括相背的两个阶梯面6202,第四密封件93可以承载在其中一个阶梯面6202上,也可以同时承载在两个阶梯面6202上以实现双面防水。由于设置了第四密封件93,能够防止无人飞行器500在雨天或湿度较大的环境飞行、或者是在执行喷洒任务时,水或喷洒液从底板42或底壁62渗入收容腔61而损坏电子调速器80,提高了电机100的密封性能,从而实现了电机100的防水功能。
44.在某些实施方式中,盖体40还包括凸台46,凸台46自外表面424延伸,第一结合孔428开设在凸台46的端部,锁固件70穿过第二结合孔620与第一结合孔428配合以使底座60与盖体40结合时,凸台46收容在收容腔61内,此时,底座60与盖体40的结合更加稳定牢固。在某些实施方式中,底座60还包括自上表面622延伸的凸块66,第二结合孔620贯穿下表面624及凸块66,此时,底座60与盖体40的结合更加稳定牢固。
45.在某些实施方式中,底座60还开设有灯罩孔67,电机100还包括发光二极体68及灯罩69,灯罩69安装在灯罩孔67内,发光二极体68收容在收容腔61内并与灯罩69对应,发光二极体68与电子调速器80电连接能够发出光线以在夜间飞行时提醒用户无人飞行器500的所在位置。
46.在某些实施方式中,灯罩69的位于收容腔61内的表面涂覆有密封胶60a,以能够进一步提高电机100的密封性能,从而实现了电机100的防水功能。
47.在某些实施方式中,进一步地,电机100还可包括散热件96,散热件95收容在定子14内并与基座12及定子14止转连接,散热件95用于散掉电机100产生的热量。
48.在某些实施方式中,电机100还包括连接臂94,连接臂94自侧壁64的外侧面644延伸,电子调速器80与穿设在连接臂94内的电线95电连接。连接臂94与机臂520能够拆卸地连接。连接臂94可以但不局限于为套筒,卡扣,插入件,换言之,连接臂94可以与机臂520套接、卡接、或插接。当然,连接臂94也可以与机臂520固定连接,例如采用胶合、焊接、或者一体成型的方式。
49.本发明实施方式还提供一种无人飞行器的动力套装,包括上述任意一实施方式的
电机100、第一密封件90及连接臂94。第一密封件90收容在收容腔61内并密封底座60与盖体40之间的空隙,连接臂94与底座60固定连接,并用于与无人飞行器500的机臂520可拆卸连接。即,连接臂94可以与机臂520套接、卡接、或插接。
50.本发明实施方式还提供一种无人飞行器的动力套装,包括电机安装座、电机、电子调速器及第一密封件90。其中,电机安装座包括底座60以及与底座60固定连接的连接臂94,底座60设有凹槽60b,连接臂94用于与无人飞行器500的机臂520可拆卸连接。电机仅包括上述实施方式的电机本体10、罩体20、转轴30、盖体40;该电机安装在底座60上,电机的底部对应凹槽60b的开口设置,并且电机与凹槽60b共同配合,形成收容腔61。电子调速器80,收容在收容腔61内,电子调速器80与电机电连接,用于驱动电机转动。第一密封件90设置在收容腔61的开口处,用于密封所述收容腔61的开口周缘与电机的底部之间的间隙。
51.在某些实施方式中,进一步地,定子14还包括多个止挡部1426,每个止挡部1426设置在每个支撑部1424的端部以阻挡线圈从支撑部1424脱离。
52.在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
53.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个所述特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
54.尽管上面已经示出和描述了本发明的实施方式,可以理解的是,上述实施方式是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施方式进行变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。