1.本发明涉及空间机器人研究和工程领域,具体是一种解耦的四自由度软对接机构。
背景技术:
2.随着空间科学技术的发展,人类对太空探索的脚步日益加快,空间交会对接技术已成为当前航天技术研究的重要领域,是拓展新型航天装备、避免航天员舱外操作带来的高风险的有效途径。在空间交会对接过程中,两航天器会发生相互接触碰撞,动量传递不对称,为避免航天器在碰撞过程中造成不必要的损伤变形,保证接航天器的安全,实现可靠对接,在对接机构上设计阻尼缓冲系统,实现具有动量卸载功能的软对接。
3.目前的空间对接技术所采用的对接机构中,主要有锥—杆式对接系统、飞网技术、电磁对接、刚性机械臂式等。以上对接机构主要以柔性绳索为主要执行元件或通过在末端执行器设计相关机构捕获子系统,在约束条件上要求两航天器之间相对位姿测量、跟踪、保持等方面满足高精度要求,对空间对接的瞬间位姿扰动要求也极高。
技术实现要素:
4.本发明针对现有空间机器人对接操作过程中的能量冲击,以及两航天器在各种复杂空间条件下能量阶跃式传递的难题,设计了一种解耦的四自由度软对接机构,在笛卡尔坐标系中具有绕x、y、z轴旋转和沿z轴平移的四个自由度,且各自由度之间互不干涉;机构中设计了阻尼缓冲组件,使机构具备空间六维动量卸载的能力,从而能实现航天器对接过程中的平稳软对接,降低当前空间操作硬对接带来的各种风险,拓展空间机器人操作的应用性和可靠性。本机构中设计了离合器和电磁制动滑块来控制转动副的相对转动和移动副的相对移动,当机构不执行对接任务时将各运动副锁紧,使机构呈现刚性;当执行对接任务时将各运动副放松,使机构呈现柔性。
5.为达到上述目的,本发明采用了以下技术方案:
6.一种解耦的四自由度软对接机构,主要包括传动机构、阻尼缓冲组件和传感组件。
7.所述传动机构是主要由固定板(101)、旋转外壳(107)、旋转内壳(108)、支架一(310)、支架二(305)、支架三(112)、支架四(103)、支架五(113)、支架六(102)、支架七(106)、支架八(111)、支架九(110)、支架十(109)、联轴器(402)、旋转主轴z(411)、旋转主轴z固连件(406)、深沟球轴承一(407)、深沟球轴承二(409)、套筒(408)、离合器x(203)、离合器y(207)、离合器z(403)、电磁制动滑块一(301)、电磁制动滑块二(308)、滑轨一(302)、滑轨二(309)、直线阻尼器固定座(306)组成的机械结构。阻尼缓冲组件主要由扭转弹簧座x(105)、扭转弹簧座y(210)、扭转弹簧座z(410)、扭簧固连件(206)、扭转弹簧x(204)、扭转弹簧y(209)、扭转弹簧z(404)、旋转式磁流变阻尼器x(201)、旋转式磁流变阻尼器y(202)、旋转式磁流变阻尼器z(401)、阻尼轴z(413)、十字轴(104)、直线弹簧z(304)、直线式磁流变阻尼器(303)组成。传感组件由直线位移传感器(307)、编码器x(205)、编码器y(208)、编码器z
(405)组成,主要用于绕x、y、z轴旋转和沿z轴平移的运动参数测量。
8.所述的直线式磁流变阻尼器(303)与直线弹簧z(304)共同组成z轴平移方向的阻尼缓冲装置。直线式磁流变阻尼器(303)本体与直线弹簧z(304)共同固定于直线阻尼器固定座(306)上。直线阻尼器固定座(306)通过支架二(305)以及两个上下对称分布的支架一(310)分别与支架三(112)和支架四(103)连接。直线式磁流变阻尼器(303)输入端与固定板(101)连接,固定板(101)分别与支架六(102)和支架五(113)连接。固定于支架六(102)上的电磁制动滑块一(301)与固定于支架四(103)上的滑轨一(302)构成一对沿z轴的移动副;同理,固定于支架五(113)上的电磁制动滑块二(308)与固定于支架三(112)上的滑轨二(309)构成另一对沿z轴的移动副,并能通过电磁控制两个移动副的相对移动,使其处于自由滑动模式或锁紧模式。
9.所述的旋转式磁流变阻尼器x(201)的基体安装于支架八(111),旋转式磁流变阻尼器y(202)的基体安装于支架三(112),二者的旋转轴分别由十字轴(104)充当。离合器x(203)和离合器y(207)的转子分别通过键与十字轴(104)连接,其中离合器x(203)的定子与支架七(106)连接,离合器y(207)的定子与支架四(103)连接。所述的编码器x(205)通过扭转弹簧座x(105)连接于支架七(106),编码器y(208)通过扭转弹簧座y(210)连接于支架四(103),它们的旋转轴由十字轴充当。所述扭转弹簧x(204)和扭转弹簧y(209),其中一端均通过扭簧固连件(206)与十字轴(104)连接,另一端分别与扭转弹簧座x(105)和扭转弹簧座y(210)连接。
10.所述的旋转式磁流变阻尼器z(401)与支架九(110)连接,其旋转轴为阻尼轴z(413),支架九(110)分别与支架七(106)和支架八(111)连接。离合器z(403)的转子通过键与旋转主轴z(411)连接,可随轴一同转动,其定子与旋转外壳连接板(412)连接,旋转外壳连接板(412)通过前后两个对称的支架十(109)与支架九(110)连接。编码器z(405)通过扭转弹簧座z(410)与旋转外壳连接板(412)连接,其轴为旋转主轴z(411)。另外,旋转主轴z(411)通过旋转主轴z固连件(406)与旋转内壳连接,二者可实现同步转动。同理,扭转弹簧z(404)一端通过扭簧固连件(206)与旋转主轴z(411)连接,另一端与扭转弹簧座z(410)连接。阻尼轴z(413)与旋转主轴z(411)之间通过联轴器(402)连接,实现传动。
11.所述的旋转外壳(107)与旋转外壳连接板(412)连接。旋转内壳(108)和旋转外壳(107)之间安装有深沟球轴承一(407)和深沟球轴承二(409),从而实现了两者的相对转动。
12.所述的旋转式磁流变阻尼器x(201)、扭转弹簧x(204)组成了x轴旋转阻尼缓冲组件;所述的旋转式磁流变阻尼器y(202)、扭转弹簧y(209)组成了y轴旋转阻尼缓冲组件;所述的旋转式磁流变阻尼器z(401)、扭转弹簧z(404)组成了z轴旋转阻尼缓冲组件;所述的直线式磁流变阻尼器(303)、直线弹簧z(304)组成了z轴直线阻尼缓冲组件。
13.与现有技术相比本发明有以下特点:
14.1.本机构拥有绕x、y、z轴旋转和沿z轴平移四个自由度,而且四个自由度之间互不干涉,实现了运动的解耦。通过在移动副和转动副部位设计运动控制部件——离合器和电磁制动滑块,在电磁的控制下可以使机构呈现刚性和柔性两种状态。
15.2.本机构设计了三个旋转和一个直线共四组阻尼缓冲组件,对对接过程中的动量冲击进行卸载:对接过程中x、y、z旋转方向的动量被三组旋转阻尼缓冲组件卸载;z轴直线的动量被直线阻尼缓冲组件卸载;x、y轴直线方向的动量可以转换为y、x旋转方向的动量,
从而被y、x轴的旋转阻尼缓冲组件卸载。所以此机构能实现空间六维的动量卸载,从而实现了航天器对接时的平稳软接触。
16.3.本机构中采用具有柔性可控阻尼系数的磁流变阻尼器,能实现对机构的半主动控制。磁流变阻尼器具有能量消耗低、结构简单、阻尼力连续逆顺可调并且可调范围大、响应快、良好的温度稳定性以及可与微机控制结合等优良特性。因此可应用于空间软对接机构中,从而起到减小冲击振动载荷、动量卸载、吸收碰撞动能的作用。
附图说明
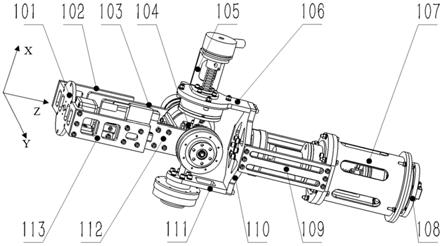
17.图1是本发明具体实施方式的整体外观结构示意图;
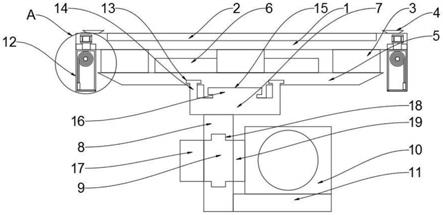
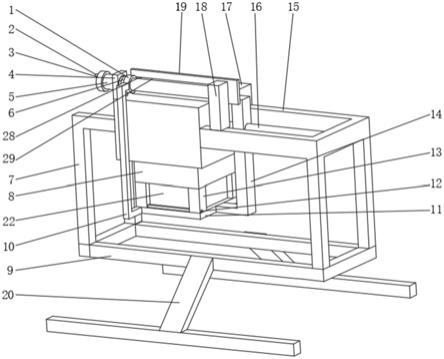
18.图2、3为本发明具体实施方案的局部外观结构示意图;
19.图4为本发明具体实施方案的局部内部结构示意图。
20.附图中的标号说明如下:
21.固定板(101)、支架六(102)、支架四(103)、十字轴(104)、扭力弹簧座x(105)、支架七(106)、旋转外壳(107)、旋转内壳(108)、支架十(109)、支架九(110)、支架八(111)、支架三(112)、支架五(113)、旋转式磁流变阻尼器x(201)、旋转式磁流变阻尼器y(202)、离合器x(203)、扭转弹簧x(204)、编码器x(205)、扭簧固连件(206)、离合器y(207)、编码器y(208)、扭转弹簧y(209)、扭转弹簧座y(210)、电磁制动滑块一(301)、滑轨一(302)、直线式磁流变阻尼器(303)、直线弹簧z(304)、支架二(305)、直线阻尼器固定座(306)、直线位移传感器(307)、电磁制动滑块二(308)、滑轨二(309)、支架一(310)、旋转式磁流变阻尼器z(401)、联轴器(402)、离合器z(403)、扭转弹簧z(404)、编码器z(405)、旋转主轴z固连件(406)、深沟球轴承一(407)、套筒(408)、深沟球轴承二(409)、扭转弹簧座z(410)、旋转主轴z(411)、旋转外壳连接板(412)、阻尼轴z(413)。
具体实施方案
22.下面结合附图1~4对本发明做进一步说明:
23.本发明包括传动机构、阻尼缓冲组件以及传感组件三部分。
24.所述传动机构是主要由固定板(101)、旋转外壳(107)、旋转内壳(108)、支架一(310)、支架二(305)、支架三(112)、支架四(103)、支架五(113)、支架六(102)、支架七(106)、支架八(111)、支架九(110)、支架十(109)、联轴器(402)、旋转主轴z(411)、旋转主轴z固连件(406)、深沟球轴承一(407)、深沟球轴承二(409)、套筒(408)、离合器x(203)、离合器y(207)、离合器z(403)、电磁制动滑块一(301)、电磁制动滑块二(308)、滑轨一(302)、滑轨二(309)、直线阻尼器固定座(306)组成的机械结构。阻尼缓冲组件主要由扭转弹簧座x(105)、扭转弹簧座y(210)、扭转弹簧座z(410)、扭簧固连件(206)、扭转弹簧x(204)、扭转弹簧y(209)、扭转弹簧z(404)、旋转式磁流变阻尼器x(201)、旋转式磁流变阻尼器y(202)、旋转式磁流变阻尼器z(401)、阻尼轴z(413)、十字轴(104)、直线弹簧z(304)、直线式磁流变阻尼器(303)组成。传感组件由直线位移传感器(307)、编码器x(205)、编码器y(208)、编码器z(405)组成,主要用于绕x、y、z轴旋转和沿z轴平移的运动参数测量。
25.所述的直线式磁流变阻尼器(303)与直线弹簧z(304)共同组成z轴平移方向的阻尼缓冲装置。直线式磁流变阻尼器(303)本体与直线弹簧z(304)共同固定于直线阻尼器固
定座(306)上。直线阻尼器固定座(306)通过支架二(305)以及两个上下对称分布的支架一(310)分别与支架三(112)和支架四(103)连接。直线式磁流变阻尼器(303)输入端与固定板(101)连接,固定板(101)分别与支架六(102)和支架五(113)连接。固定于支架六(102)上的电磁制动滑块一(301)与固定于支架四(103)上的滑轨一(302)构成一对沿z轴的移动副;同理,固定于支架五(113)上的电磁制动滑块二(308)与固定于支架三(112)上的滑轨二(309)构成另一对沿z轴的移动副,并能通过电磁控制两个移动副的相对移动,使其处于自由滑动模式或锁紧模式。
26.所述的旋转式磁流变阻尼器x(201)的基体安装于支架八(111),旋转式磁流变阻尼器y(202)的基体安装于支架三(112),二者的旋转轴分别由十字轴(104)充当。离合器x(203)和离合器y(207)的转子分别通过键与十字轴(104)连接,其中离合器x(203)的定子与支架七(106)连接,离合器y(207)的定子与支架四(103)连接。所述的编码器x(205)通过扭转弹簧座x(105)连接于支架七(106),编码器y(208)通过扭转弹簧座y(210)连接于支架四(103),它们的旋转轴由十字轴充当。所述扭转弹簧x(204)和扭转弹簧y(209),其中一端均通过扭簧固连件(206)与十字轴(104)连接,另一端分别与扭转弹簧座x(105)和扭转弹簧座y(210)连接。
27.所述的旋转式磁流变阻尼器z(401)与支架九(110)连接,其旋转轴为阻尼轴z(413),支架九(110)分别与支架七(106)和支架八(111)连接。离合器z(403)的转子通过键与旋转主轴z(411)连接,可随轴一同转动,其定子与旋转外壳连接板(412)连接,旋转外壳连接板(412)通过前后两个对称的支架十(109)与支架九(110)连接。编码器z(405)通过扭转弹簧座z(410)与旋转外壳连接板(412)连接,其轴为旋转主轴z(411)。另外,旋转主轴z(411)通过旋转主轴z固连件(406)与旋转内壳连接,二者可实现同步转动。同理,扭转弹簧z(404)一端通过扭簧固连件(206)与旋转主轴z(411)连接,另一端与扭转弹簧座z(410)连接。阻尼轴z(413)与旋转主轴z(411)之间通过联轴器(402)连接,实现传动。
28.所述的旋转外壳(107)与旋转外壳连接板(412)连接。旋转内壳(108)和旋转外壳(107)之间安装有深沟球轴承一(407)和深沟球轴承二(409),从而实现了两者的相对转动。
29.所述的旋转式磁流变阻尼器x(201)、扭转弹簧x(204)组成了x轴旋转阻尼缓冲组件;所述的旋转式磁流变阻尼器y(202)、扭转弹簧y(209)组成了y轴旋转阻尼缓冲组件;所述的旋转式磁流变阻尼器z(401)、扭转弹簧z(404)组成了z轴旋转阻尼缓冲组件;所述的直线式磁流变阻尼器(303)、直线弹簧z(304)组成了z轴直线阻尼缓冲组件。
30.当不执行对接任务时,电磁制动滑块一(301)、电磁制动滑块二(308)、离合器x(203)、离合器y(207)、离合器z(403)均处于上电锁紧状态,使得电磁制动滑块一(301)与滑轨一(302)之间,电磁制动滑块二(308)与滑轨二(309)之间,十字轴(104)与支架四(103)、支架五(112)、支架七(106)、支架八(111)之间,旋转外壳(107)与旋转内壳(108)之间保持相对固定,整个机构呈现刚性状态。
31.当执行对接任务时,电磁制动滑块一(301)、电磁制动滑块二(308)、离合器x(203)、离合器y(207)、离合器z(403)均处于失电断开状态,使得电磁制动滑块一(301)与滑轨一(302)之间,电磁制动滑块二(308)与滑轨二(309)之间,十字轴(104)与支架四(103)、支架五(112)、支架七(106)、支架八(111)之间,旋转外壳(107)与旋转内壳(108)之间均能发生相对运动,整个机构呈现柔性操作状态。机构中加入了三个旋转和一个直线共四组阻
尼缓冲组件,对对接过程中的动量进行卸载,将本机构放置于空间笛卡尔坐标系中,机构的偏航和俯仰两个方向分别作为x和y轴,对接过程中x、y、z旋转方向的动量被三组旋转阻尼缓冲组件卸载,z轴直线的动量被直线阻尼缓冲组件卸载,x、y轴直线方向的动量通过传递与转换,被y、x轴的旋转阻尼缓冲组件卸载,因此此机构能实现空间六维的动量卸载。具体到每一个方向的动量卸载实施原理如下:
32.当机构末端受到x轴旋转方向的动量冲击时,离合器x(203)处于分离状态,角动量使支架七(106)、支架八(111)和十字轴(104)之间发生相对转动,此时扭转弹簧x(204)会发生扭转产生被动缓冲作用,编码器x(205)则监测运动变量,并将变量传输给控制器,由设计的目标控制算法和旋转式磁流变阻尼器x(201)构成半主动控制器,目标控制算法根据运动变量计算出缓冲碰撞的期望阻尼力矩,再由旋转式磁流变阻尼器x(201)通过电磁控制输出相应阻尼力矩,从而实现x轴旋转方向对冲击角动量的卸载控制。
33.当机构末端受到y轴旋转方向的动量冲击时,离合器y(207)处于分离状态,角动量使支架三(112)、支架四(103)和十字轴(104)之间发生相对转动,此时扭转弹簧y(209)会发生扭转产生被动缓冲作用,编码器y(208)则监测运动变量,并将变量传输给控制器,由设计的目标控制算法和旋转式磁流变阻尼器y(202)构成半主动控制器,目标控制算法根据运动变量计算出缓冲碰撞的期望阻尼力矩,再由旋转式磁流变阻尼器y(202)通过电磁控制输出相应阻尼力矩,从而实现y轴旋转方向对冲击角动量的卸载控制。
34.当机构末端受到z轴旋转方向的动量冲击时,离合器z(403)处于分离状态,角动量使旋转外壳(107)和旋转内壳(108)发生相对转动,此时扭转弹簧z(404)会发生扭转产生被动缓冲作用,编码器z(405)则监测运动变量,并将变量传输给控制器,由设计的目标控制算法和旋转式磁流变阻尼器z(401)构成半主动控制器,目标控制算法根据运动变量计算出缓冲碰撞的期望阻尼力矩,再由旋转式磁流变阻尼器z(401)通过电磁控制输出相应阻尼力矩,从而实现z轴旋转方向对冲击角动量的卸载控制。
35.当机构末端受到x轴直线方向的动量冲击时,由于力作用点与十字轴之间存在力臂,因此x轴直线方向的动量冲击能转化为绕y轴旋转方向的角动量冲击,从而动量被转换卸载。
36.当机构末端受到y轴直线方向的动量冲击时,由于力作用点与十字轴之间存在力臂,因此y轴直线方向的动量冲击能转化为绕x轴旋转方向的角动量冲击,从而动量被转换卸载。
37.当机构末端受到z轴直线方向的动量冲击时,电磁制动滑块一(301)和滑轨一(302)之间、电磁制动滑块二(308)和滑轨二(309)之间均处于分离状态,能发生相对平移。机构的固定板(101)受到冲击,使电磁制动滑块一(301)和滑轨一(302)之间、电磁制动滑块二(308)和滑轨二(309)之间发生相对平移,此时直线弹簧z(304)会发生形变,从而产生被动缓冲作用,直线位移传感器(307)监测运动变量,并将变量传输给控制器,由设计的目标控制算法和直线式磁流变阻尼器(303)构成半主动控制器,目标控制算法根据运动变量计算出缓冲碰撞的期望阻尼力,再由直线式磁流变阻尼器(303)通过电磁控制输出相应阻尼力,从而实现关节对z轴直线方向动量的卸载控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。