1.本实用新型属于飞行器技术领域,尤其是涉及一种仿生飞行器的姿态控制机构。
背景技术:
2.随着飞行器技术的发展,对于仿生飞行器的研究已经成为飞行器研究领域的前沿课题。例如,仿生扑翼飞行器可以模拟自然界中的鸟类、蜻蜓等一样飞行,有一定的飞行效率,悬停性、抗风性、机动性也优于多旋翼和固定翼,是目前飞行器发展的一种颠覆性技术和热点方向,具有广泛的应用前景。
3.现有的仿生扑翼飞行器的转向等姿态控制主要通过两个翅膀扇动频率的不同来实现,即通过一侧翅膀扇动频率高于另一侧扇动频率来实现机身的转向,该种驱动方式存在着诸多不足,例如,稳定性差,飞行时不够灵活,无法更好地控制飞行器转向,仿生效果不好,因此,这些问题极大地限制了现有仿生扑翼飞行器的发展。
4.为了解决现有技术存在的问题,人们进行了长期的探索,提出了各式各样的解决方案。例如,中国专利文献公开了一种仿生扑翼飞行器[申请号:201910807028.9],包括动力传递机构、两组翅根扇动机构、两组翅根转动机构和一对翅膀;动力传递机构置于整个机构前部,其作用是将动力传递至翅根扇动机构,在翅根扇动机构的外围有翅根转动机构,一对翅膀对称设置在扑翼飞行器的两侧,并与翅根扇动机构相连,可以在翅根扇动机构的作用下实现扇动,也在翅根转动机构的作用下实现转动,为飞行器提供动力。
[0005]
上述方案在一定程度上解决了现有仿生飞行器的转向控制不便的问题,但是由于该方案中依然存在着:翅膀扇动幅度调整不便,不够灵活,飞行器转向控制精度差,仿生效果不好等问题。
技术实现要素:
[0006]
本实用新型的目的是针对上述问题,提供一种结构简单合理,机身转向控制精度高的仿生飞行器的姿态控制机构。
[0007]
为达到上述目的,本实用新型采用了下列技术方案:本仿生飞行器的姿态控制机构,包括用于安装翅膀体的翅膀安装座,所述的翅膀安装座与翅膀转动座一端相连,其特征在于,且所述的翅膀转动座通过翅膀旋转安装轴和设置在飞行器机身上的翅膀固定座转动相连,所述的翅膀转动座另一端通过转动轴和能上下移动的滑座体上端转动相连,所述的翅膀旋转安装轴和转动轴之间设有能调整两者之间间距大小的轴体间距调整机构,所述的翅膀安装座具有相邻转动设置的翅膀内安装板和翅膀外安装板,所述的翅膀内安装板与翅膀转动座相连,且所述的翅膀体设置在翅膀外安装板上,所述的翅膀内安装板和翅膀外安装板之间设有能使翅膀外安装板相对于翅膀内安装板周向转动的翅膀转动驱动机构。
[0008]
在上述的仿生飞行器的姿态控制机构中,所述的翅膀内安装板靠近翅膀外安装板一侧具有凹陷槽,且所述的翅膀外安装板通过板体转动安装机构转动安装在凹陷槽内。
[0009]
在上述的仿生飞行器的姿态控制机构中,所述的板体转动安装机构包括设置在翅
膀内安装板一侧且位于凹陷槽中部的板体安装轴,所述的翅膀外安装板中部具有套设于板体安装轴上的板体安装孔且所述的板体安装孔和板体安装轴转动相连,所述的翅膀外安装板两端分别具有弧形导向部,且所述的弧形导向部以板体安装孔的中心为圆心周向分布设置,在凹陷槽两端分别具有与弧形导向部相配合的弧形配合部。
[0010]
在上述的仿生飞行器的姿态控制机构中,所述的翅膀转动驱动机构为齿轮齿条式转动调整机构。
[0011]
在上述的仿生飞行器的姿态控制机构中,所述的翅膀转动驱动机构包括通过齿条安装座固定在翅膀内安装板一端的弧形齿条,所述的齿条安装座内侧朝向翅膀外安装板延伸设置的弧形限位部,所述的翅膀内安装板一端具有与弧形限位部相抵靠的弧形台阶,且所述的弧形配合部形成于弧形限位部内侧,且所述的弧形导向部形成于弧形台阶上,在翅膀内安装板一端具有齿轮安装孔,所述的齿轮安装孔内设有与弧形齿条相啮合的转动齿轮,且所述的转动齿轮与设置在齿条安装座上的转动驱动电机相连。
[0012]
在上述的仿生飞行器的姿态控制机构中,所述的翅膀固定座具有若干个且依次固定设置在飞行器机身侧部,且所述的翅膀转动座分别依次设置在相邻的两个翅膀固定座之间,且所述的翅膀旋转安装轴依次穿设于翅膀固定座和翅膀转动座内,且所述的翅膀转动座靠近翅膀旋转安装轴一端固定设置在翅膀安装座一侧,且所述的翅膀体安装设置在翅膀安装座另一侧。
[0013]
在上述的仿生飞行器的姿态控制机构中,所述的翅膀转动座包括转动套体,所述的翅膀内安装板与转动套体周向一侧相连且翅膀旋转安装轴穿设于转动套体内,所述的转动套体周向另一侧具有与转动套体连为一体的转动座连接板,各个翅膀转动座均与一个连接架体相连,所述的连接架体具有若干和各个翅膀转动座的转动座连接板一一对应且相连的连接部。
[0014]
在上述的仿生飞行器的姿态控制机构中,所述的轴体间距调整机构包括分别形成于连接架体的连接部和翅膀转动座的转动座连接板之间的连接通道,且位于连接架体两侧的连接通道与形成于连接架体两侧的导向筒体相对接,在转动轴两端分别设有导向杆,且所述的导向杆分别滑动穿设在导向筒体和连接通道内,且所述的转动轴与翅膀转动座和/或连接架体之间设有能使转动轴靠近或远离翅膀转动座与连接架体的轴体间距调整组件。
[0015]
在上述的仿生飞行器的姿态控制机构中,所述的轴体间距调整组件包括套设于转动轴中部的轴体转动套体,所述的转动轴依次穿设于滑座体上端和轴体转动套体内且轴体转动套体位于相邻两个滑座体之间,在轴体转动套体和位于连接架体中部的连接通道之间设有丝杆,且所述的丝杆一端与轴体转动套体可拆相连,另一端活动插接于连接架体中部的连接通道内,在连接架体中部具有供丝杆穿过的缺口,所述的缺口内设有与缺口两侧固定的螺套安装座,且所述的螺套安装座内转动设有套设于丝杆上且与丝杆螺纹相连的螺套体,且所述的螺套体和螺套安装座之间周向转动且轴向定位,且所述的连接架体上设有间距调整电机,且所述的间距调整电机通过间隙调整皮带和位于螺套安装座外侧且与螺套体联动的间隙调整带轮相连。
[0016]
在上述的仿生飞行器的姿态控制机构中,所述的飞行器机身尾部活动设有机尾体,所述的机尾体包括通过机尾转轴转动设置在飞行器机身的机身骨架尾部上端的机尾骨架,所述的机身骨架上设有竖直设置的机尾转向电机,且所述的机尾转向电机的输出轴上
连接有与机尾骨架相连的机尾摆动杆。
[0017]
与现有的技术相比,本仿生飞行器的姿态控制机构的优点在于:通过改变翅膀旋转安装轴和转动轴之间的距离从而实现控制翅膀扇动的幅度,通过翅膀转动驱动机构可以调整翅膀体相对于飞行器机身转动角度,通过机尾转向电机可以使机尾体相对于飞行器机身转动,机尾转动以及调整两边翅膀与机身之间的夹角以及改变两边翅膀的扇动幅度从而实现机身的升降、转向等姿态控制,转向控制精度高,仿生效果好。
附图说明
[0018]
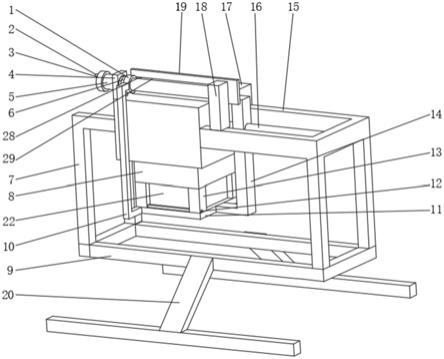
图1为本实用新型提供的仿生飞行器的整体结构示意图。
[0019]
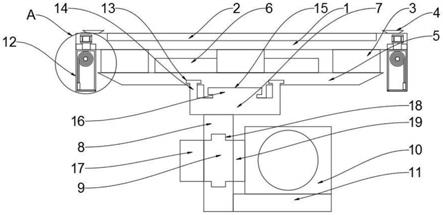
图2为本实用新型中姿态控制机构的结构示意图。
[0020]
图3为本实用新型中机身骨架的结构示意图。
[0021]
图4为本实用新型中翅膀安装座的结构示意图。
[0022]
图5为本实用新型中翅膀内安装板的结构示意图。
[0023]
图6为本实用新型中姿态控制机构的局部结构示意图。
[0024]
图7为本实用新型中姿态控制机构的另一个局部结构示意图。
[0025]
图8为本实用新型中连接架体的结构示意图。
[0026]
图中,翅膀体1、翅膀固定座2、翅膀旋转安装轴21、翅膀安装座22、翅膀内安装板221、翅膀外安装板222、翅膀转动座3、转动轴31、转动套体32、转动座连接板33、连接架体34、连接部35、凹陷槽4、滑座体41、板体安装轴42、板体安装孔43、弧形导向部44、弧形配合部45、翅膀转动驱动机构5、齿条安装座51、弧形齿条52、弧形限位部53、弧形台阶54、齿轮安装孔55、转动齿轮56、转动驱动电机57、轴体间距调整机构6、连接通道61、导向筒体62、导向杆63、轴体转动套体64、丝杆65、缺口66、螺套安装座67、螺套体68、间距调整电机69、间隙调整皮带691、间隙调整带轮692、飞行器机身7、机尾体71、机尾转轴72、机身骨架73、机尾骨架74、机尾转向电机75、机尾摆动杆76。
具体实施方式
[0027]
下面结合附图和具体实施方式对本实用新型做进一步详细的说明。
[0028]
如图1
‑
2所示,本仿生飞行器的姿态控制机构,包括用于安装翅膀体1的翅膀安装座22,翅膀安装座22与翅膀转动座3一端相连,翅膀转动座3通过翅膀旋转安装轴21和设置在飞行器机身7上的翅膀固定座2转动相连,翅膀转动座3另一端通过转动轴31和能上下移动的滑座体41上端转动相连,翅膀旋转安装轴21和转动轴31之间设有能调整两者之间间距大小的轴体间距调整机构6,翅膀安装座22具有相邻转动设置的翅膀内安装板221和翅膀外安装板222,翅膀内安装板221与翅膀转动座3相连,且翅膀体1设置在翅膀外安装板222上,翅膀内安装板221和翅膀外安装板222之间设有能使翅膀外安装板222相对于翅膀内安装板221周向转动的翅膀转动驱动机构5。
[0029]
其中,如图1和3所示,这里的飞行器机身7尾部活动设有机尾体71,机尾体71包括通过机尾转轴72转动设置在飞行器机身7的机身骨架73尾部上端的机尾骨架74,机身骨架73上设有竖直设置的机尾转向电机75,且机尾转向电机75的输出轴上连接有与机尾骨架74相连的机尾摆动杆76。
[0030]
显然,这里的通过轴体间距调整机构6改变翅膀旋转安装轴21和转动轴31之间的距离从而实现控制翅膀扇动的幅度,通过翅膀转动驱动机构5可以调整翅膀体1相对于飞行器机身7转动角度,通过机尾转向电机75可以使机尾体71相对于飞行器机身7转动,机尾转动以及调整两边翅膀与机身之间的夹角以及改变两边翅膀的扇动幅度从而实现机身的升降、转向等姿态控制。
[0031]
具体来讲,如图2和图4
‑
5所示,这里的翅膀内安装板221靠近翅膀外安装板222一侧具有凹陷槽4,且翅膀外安装板222通过板体转动安装机构转动安装在凹陷槽4内。
[0032]
其中,这里的板体转动安装机构包括设置在翅膀内安装板221一侧且位于凹陷槽4中部的板体安装轴42,翅膀外安装板222中部具有套设于板体安装轴42上的板体安装孔43且板体安装孔43和板体安装轴42转动相连,翅膀外安装板222两端分别具有弧形导向部44,且弧形导向部44以板体安装孔43的中心为圆心周向分布设置,在凹陷槽4两端分别具有与弧形导向部44相配合的弧形配合部45。当翅膀转动驱动机构5带动翅膀外安装板222相对于翅膀内安装板221周向转动时,翅膀外安装板222以板体安装孔43的中心为圆心周向转动。
[0033]
进一步地,这里的翅膀转动驱动机构5为齿轮齿条式转动调整机构。例如,这里的翅膀转动驱动机构5可以包括通过齿条安装座51固定在翅膀内安装板221一端的弧形齿条52,齿条安装座51内侧朝向翅膀外安装板222延伸设置的弧形限位部53,翅膀内安装板221一端具有与弧形限位部53相抵靠的弧形台阶54,且弧形配合部45形成于弧形限位部53内侧,且弧形导向部44形成于弧形台阶54上,在翅膀内安装板221一端具有齿轮安装孔55,齿轮安装孔55内设有与弧形齿条52相啮合的转动齿轮56,且转动齿轮56与设置在齿条安装座51上的转动驱动电机57相连。显然,通过转动驱动电机57带动转动齿轮56周向转动,由于转动齿轮56和弧形齿条52相互啮合从而带动翅膀外安装板222相对于翅膀内安装板221周向转动,优选地,这里的转动角度控制在15度以内为宜。
[0034]
如图2和图6
‑
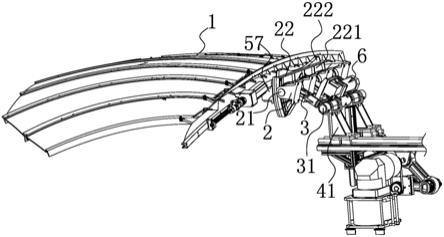
8所示,这里的翅膀固定座2具有四个且依次固定设置在飞行器机身侧部,且翅膀转动座3的数量为三个且分别依次设置在相邻的两个翅膀固定座2之间,翅膀旋转安装轴21依次穿设于翅膀固定座2和翅膀转动座3内,且翅膀转动座3靠近翅膀旋转安装轴21一端固定设置在翅膀安装座22一侧,且翅膀体1安装设置在翅膀安装座22另一侧,通过将翅膀体1安装设置在翅膀安装座22一侧,然后再将翅膀安装座22与翅膀转动座3相连。
[0035]
具体来讲,翅膀转动座3包括转动套体32,翅膀内安装板221与转动套体32周向一侧相连且翅膀旋转安装轴21穿设于转动套体32内,转动套体32周向另一侧具有与转动套体32连为一体的转动座连接板33,各个翅膀转动座3均与一个连接架体34相连,连接架体34具有若干和各个翅膀转动座3的转动座连接板33一一对应且相连的连接部35,通过将各个转动座连接板33与连接架体34的各个连接部35相连实现转动座连接板33一起联动。
[0036]
进一步来讲,这里的轴体间距调整机构6包括分别形成于连接架体34的连接部35和翅膀转动座3的转动座连接板33之间的连接通道61,且位于连接架体34两侧的连接通道61与形成于连接架体34两侧的导向筒体62相对接,在转动轴31两端分别设有导向杆63,且导向杆63分别滑动穿设在导向筒体62和连接通道61内,起到滑动导向的作用,且转动轴31与翅膀转动座3和/或连接架体34之间设有能使转动轴31靠近或远离翅膀转动座3与连接架体34的轴体间距调整组件。
[0037]
优选地,这里的轴体间距调整组件包括套设于转动轴31中部的轴体转动套体64,
转动轴31依次穿设于滑座体41上端和轴体转动套体64内且轴体转动套体64位于相邻两个滑座体41之间,在轴体转动套体64和位于连接架体34中部的连接通道61之间设有丝杆65,且丝杆65一端与轴体转动套体64可拆相连,另一端活动插接于连接架体34中部的连接通道61内,在连接架体34中部具有供丝杆65穿过的缺口66,缺口66内设有与缺口66两侧固定的螺套安装座67,且螺套安装座67内转动设有套设于丝杆65上且与丝杆65螺纹相连的螺套体68,且螺套体68和螺套安装座67之间周向转动且轴向定位,且连接架体34上设有间距调整电机69,且间距调整电机69通过间隙调整皮带691和位于螺套安装座67外侧且与螺套体68联动的间隙调整带轮692相连,这里的螺套体68周向转动且轴向定位在螺套安装座67内,当间距调整电机69带动螺套体68周向转动时带动丝杆65轴向移动使得转动轴31靠近或远离翅膀旋转安装轴21。
[0038]
本实施例的原理在于:通过转动驱动电机57带动转动齿轮56周向转动,由于转动齿轮56和弧形齿条52相互啮合从而带动翅膀外安装板222相对于翅膀内安装板221周向转动,通过间距调整电机69带动螺套体68周向转动时带动丝杆65轴向移动使得转动轴31靠近或远离翅膀旋转安装轴21改变翅膀旋转安装轴21和转动轴31之间的距离时,通过机尾转向电机75可以使机尾体71相对于飞行器机身7转动,机尾转动以及调整两边翅膀与机身之间的夹角以及改变两边翅膀的扇动幅度从而实现机身的升降、转向等姿态控制。
[0039]
本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
[0040]
尽管本文较多地使用了翅膀体1、翅膀固定座2、翅膀旋转安装轴21、翅膀安装座22、翅膀内安装板221、翅膀外安装板222、翅膀转动座3、转动轴31、转动套体32、转动座连接板33、连接架体34、连接部35、凹陷槽4、滑座体41、板体安装轴42、板体安装孔43、弧形导向部44、弧形配合部45、翅膀转动驱动机构5、齿条安装座51、弧形齿条52、弧形限位部53、弧形台阶54、齿轮安装孔55、转动齿轮56、转动驱动电机57、轴体间距调整机构6、连接通道61、导向筒体62、导向杆63、轴体转动套体64、丝杆65、缺口66、螺套安装座67、螺套体68、间距调整电机69、间隙调整皮带691、间隙调整带轮692、飞行器机身7、机尾体71、机尾转轴72、机身骨架73、机尾骨架74、机尾转向电机75、机尾摆动杆76等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。