技术特征:
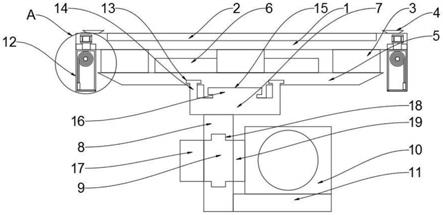
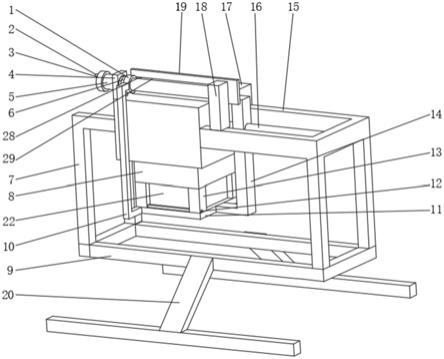
1.一种用于在弯曲的铁磁表面上着陆和停落的无人驾驶飞行器(uav),所述uav包括多个铰接的支腿,每个支腿包含:磁体,其被配置成磁性地附接到所述弯曲的铁磁表面;以及磁性支脚,其用于容纳所述磁体,并且被配置成响应于所述uav接近所述弯曲的铁磁表面,使用所述磁体在相对于所述弯曲的铁磁表面的垂直定向上朝向所述弯曲的铁磁表面磁性地铰接并且附接到所述弯曲的铁磁表面,以使所述uav着陆在所述弯曲的铁磁表面上,并且使所述uav在所述着陆后停落在所述弯曲的铁磁表面上,其中所述磁性支脚被配置成当所述uav停落在所述弯曲的铁磁表面上时,保持磁性地附接到所述弯曲的铁磁表面。2.根据权利要求1所述的uav,其中所述多个铰接的支腿包含四个铰接的支腿。3.根据权利要求1所述的uav,其中每个铰接的支腿还包含:主体,其将所述铰接的支腿附接到所述uav;以及被动铰接接头,其将所述主体联接到所述磁性支脚,并且被配置成相对于所述弯曲的铁磁表面以两个自由度被动地铰接所述磁性支脚。4.根据权利要求3所述的uav,其中所述磁体包含永磁体。5.根据权利要求4所述的uav,其中所述永磁体包含可调整数量的一个或多个永磁体。6.根据权利要求4所述的uav,其中所述磁性支脚包含磁体壳体,所述磁体壳体被配置成当所述uav停落在所述弯曲的铁磁表面上时,在距所述弯曲的铁磁表面可调整距离处将所述永磁体容纳在所述磁性支脚内。7.根据权利要求3所述的uav,其中所述磁体包含可切换磁体,并且所述磁性支脚包含马达或致动器,所述马达或致动器被配置成移动或致动所述可切换磁体的内部磁体,以便接通和关断所述可切换磁体。8.根据权利要求3所述的uav,其中所述磁体包含电永磁体,所述电永磁体被配置成响应于电流脉冲而在接通和关断之间切换。9.根据权利要求3所述的uav,其中每个铰接的支腿还包含分离马达,所述分离马达被配置成通过将所述磁性支脚倾斜远离所述弯曲的铁磁表面来将所述磁性支脚从所述弯曲的铁磁表面磁性地分离。10.根据权利要求9所述的uav,其还包含控制器,所述控制器被配置成在着陆在所述弯曲的铁磁表面上之前使用每个铰接的支腿的所述分离马达来调整所述铰接的支腿之间的间隔。11.根据权利要求3所述的uav,其还包含单分离马达,所述单分离马达被配置成通过将所述磁性支脚倾斜远离所述弯曲的铁磁表面来将所述铰接的支腿中的每一个的所述磁性支脚从所述弯曲的铁磁表面分离。12.根据权利要求11所述的uav,其还包含控制器,所述控制器被配置成在着陆在所述弯曲的铁磁表面上之前使用所述单分离马达来调整所述铰接的支腿之间的间隔。13.一种在弯曲的铁磁表面上着陆和停落无人驾驶飞行器(uav)的自动化方法,所述uav包括多个铰接的支腿,所述方法包含:用所述uav接近所述弯曲的铁磁表面;铰接每个铰接的支腿的磁性支脚,以使所述磁性支脚的磁体相对于所述弯曲的铁磁表
面垂直定向;通过使用所述磁性支脚的垂直定向磁体将每个磁性支脚磁性地附接到所述弯曲的铁磁表面,使所述uav着陆在所述弯曲的铁磁表面上;以及在所述着陆后通过使每个磁性支脚保持磁性地附接到所述弯曲的铁磁表面来将所述uav停落在所述弯曲的铁磁表面上。14.根据权利要求13所述的方法,其中所述多个铰接的支腿包含四个铰接的支腿。15.根据权利要求13所述的方法,其中每个铰接的支腿还包含主体,所述主体将所述铰接的支腿附接到所述uav,并且铰接每个磁性支脚包含使用将所述主体联接到所述磁性支脚的被动铰接接头相对于所述弯曲的铁磁表面以两个自由度被动地铰接所述磁性支脚。16.根据权利要求15所述的方法,其中所述磁体包含永磁体。17.根据权利要求16所述的方法,其中所述永磁体包含可调整数量的一个或多个永磁体,并且所述方法还包含调整所述一个或多个永磁体的数量,以便调整所述磁性支脚的重量或磁性强度。18.根据权利要求16所述的方法,其中所述磁性支脚包含磁体壳体,所述磁体壳体被配置成当所述uav停落在所述弯曲的铁磁表面上时,在距所述弯曲的铁磁表面可调整距离处将所述永磁体容纳在所述磁性支脚内,并且所述方法还包含用所述磁性支脚调整所述永磁体的位置,以便调整所述磁性支脚的磁性强度。19.根据权利要求15所述的方法,其中所述磁体包含可切换磁体,并且所述方法还包含使用所述磁性支脚的马达或致动器来移动或致动所述可切换磁体的内部磁体,以便接通和关断所述可切换磁体。20.根据权利要求15所述的方法,其中所述磁体包含电永磁体,并且所述方法还包含使用电流脉冲使所述电永磁体在接通和关断之间切换。21.根据权利要求15所述的方法,其中每个铰接的支腿包括分离马达,并且所述方法还包含使用所述分离马达将每个铰接的支腿的所述磁性支脚倾斜远离所述弯曲的铁磁表面,以便将所述磁性支脚从所述弯曲的铁磁表面磁性地分离。22.根据权利要求21所述的方法,其还包含在通过使用每个铰接的支腿的所述分离马达着陆在所述弯曲的铁磁表面上之前,由所述uav的控制器调整所述铰接的支腿之间的间隔。23.根据权利要求15所述的方法,其中所述uav还包括单分离马达,并且所述方法还包含使用所述分离马达将每个铰接的支腿的所述磁性支脚倾斜远离所述弯曲的铁磁表面,以便将所述磁性支脚从所述弯曲的铁磁表面磁性地分离。24.根据权利要求23所述的方法,其还包含在通过使用所述单分离马达着陆在所述弯曲的铁磁表面上之前,由所述uav的控制器调整所述铰接的支腿之间的间隔。
技术总结
提供一种用于在弯曲的铁磁表面上着陆和停落的无人驾驶飞行器(UAV)(500)。所述UAV包括多个铰接的支腿(850)。每个铰接的支腿包括:磁体,其被配置成磁性地附接到所述弯曲的铁磁表面;以及磁性支脚,其用于容纳所述磁体,并且被配置成响应于所述UAV接近所述弯曲的铁磁表面,使用所述磁体在相对于所述弯曲的铁磁表面的垂直定向上朝向所述弯曲的铁磁表面磁性地铰接并且附接到所述弯曲的铁磁表面,以使所述UAV着陆在所述弯曲的铁磁表面上,并且使所述UAV在所述着陆后停落在所述弯曲的铁磁表面上。所述磁性支脚被配置成当所述UAV停落在所述弯曲的铁磁表面上时,保持磁性地附接到所述弯曲的铁磁表面。弯曲的铁磁表面。弯曲的铁磁表面。
技术研发人员:F.阿布德尔拉蒂夫 M.阿布德尔卡德 J.S.尚马
受保护的技术使用者:阿卜杜拉国王科技大学
技术研发日:2019.11.26
技术公布日:2021/9/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。