1.本发明属于无人机动力系统技术领域,具体是无人航空器巡航混合动力系统。
背景技术:
2.国内外现有的无人机巡航动力系统,一类是燃油发动机,一类是无刷电机。燃油机品种型号繁多,工作方式为涡轮喷气式和活塞式,燃料多是不可再生石油产品,都是通过发动机将燃油热能转化为有用的机械能,推动航空器飞行,现在已经广泛高效使用;而无刷电动机作为新的一类动力系统,有取代发动机动力的趋势,无刷电动机的电机技术,电子调速器技术已经很成熟,除了航空器的动力系统上使用,也广泛应用在众多机电应用领域中;
3.然而,目前在世界范围使用的无人机系统搭载的巡航动力系统,一类是燃油发动机,一类是无刷电机,都是单独使用,各有其优缺点,发动机续航能力足,维护繁琐,使用不便利,大排量发动机功率大,燃油消耗高,小排量发动机相对燃油消耗小,但是功率严重不足,电动机先天有功率优势,因储能电池能力限制,续航有限。
技术实现要素:
4.本发明的目的在于克服现有技术的缺陷,提供无人航空器巡航混合动力系统。
5.为实现上述目的,本发明采用了如下技术方案:
6.无人航空器巡航混合动力系统,包括发动机、电动机及螺旋桨,所述电动机设置于所述发动机和所述螺旋桨之间,所述发动机的输出轴与所述螺旋桨的转轴之间通过一号单向轴承传动连接,所述电动机的转子与所述螺旋桨的转轴之间通过二号单向轴承传动连接。
7.优选的,所述发动机的输出轴的外圆面与所述一号单向轴承的内测滚针无间隙接触连接,所述一号单向轴承的钢环外侧面与螺旋桨的转轴内圆面过盈配合连接,通过所述一号单向轴承的固有单向传动作用,将发动机的输出轴的旋转动作传递到转轴,带动螺旋桨旋转。
8.优选的,所述发动机停止运行或运行时输出轴的转速相对于螺旋桨的转速低的情形,通过所述一号单向轴承的固有单向脱离传动作用,将发动机的输出轴脱离传动到转轴,螺旋桨不受发动机约束单向自由旋转。
9.优选的,所述电动机的转子的内圆面与所述二号单向轴承的钢环外侧面过盈配合连接,二号单向轴承的内测滚针与转轴的外圆面无间隙接触连接,通过二号单向轴承的固有单向传动作用,将电机的转子的旋转动作传递到转轴,带动螺旋桨旋转。
10.优选的,所述电动机停止运行或运行时转子的转速相对于螺旋桨的转速低的情形,通过二号单向轴承的固有单向脱离传动作用,将电动机的转子脱离传动到转轴,螺旋桨不受电动机约束单向自由旋转。
11.优选的,所述发动机和电动机均停止运行情形,通过一号单向轴承和二号单向轴承的固有单向脱离传动作用,螺旋桨不受发动机和电动机约束单向自由旋转,使得无人机
拥有螺旋桨顺桨转动降低滑翔飞行阻力的作用。
12.优选的,混合动力系统单独运行发动机工作,使得无人机正常航行的情形,包括:所述发动机单独运行驱动螺旋桨旋转,使得无人机飞行,不因电动机停止运行带来的附加阻力引起动能损失。
13.优选的,混合动力系统单独运行电动机工作,使得无人机正常航行的情形,包括:所述电动机单独运行驱动螺旋桨旋转,使得无人机飞行,不因发动机停止运行带来的附加阻力引起动能损失。
14.优选的,混合动力系统双擎运行工作,使得无人机高功率航行的情形,包括:所述发动机和电动机同时运行驱动螺旋桨旋转,使得无人机飞行。
15.综上所述,由于采用了上述技术方案,本发明的有益效果是:
16.首先,本发明设置了单向轴承和螺旋桨轴组成的双离合器结构,巧妙地创造了两个动力输出到一个螺旋桨上的结构,解决了动力连接的难题。
17.其次,本发明设计了电动机和发动机组合的混合动力系统,利用发动机和电动机的各自优点,互补不足,创造了一种全新的动力系统,最大化利用航空器有限重量分配份额,使得本案动力系统具备高能重比,高功重比的优异性能,广泛应用于航空器动力系统上。
18.最后,本发明与现有燃油发动机动力系统、蓄能电池电动机动力系统相比,具有着如下优点:
19.相同重量下的动力系统,混合动力系统比燃油发动机动力系统拥有更高功率的输出;
20.相同重量下的动力系统,混合动力系统比蓄能电池电动机动力系统拥有更长的持续动力的输出时间;
21.混合动力系统同时拥有两套能单独工作和同时工作的动力系统,相比于现有的燃油发动机动力系统,蓄能电池电动机动力系统,有着双倍的安全性能;
22.相同重量下的动力系统,因混合动力系统有电机的介入,实时让发动机工作在最佳状态,最大功率输出状态下,消耗的燃油量比燃油发动机动力系统更节省;
23.因混合动力系统将多余的巡航动能消耗转存到蓄电池存储电能,混合动力系统比蓄能电池电动机动力系统更加节省蓄电池体积和重量。
附图说明
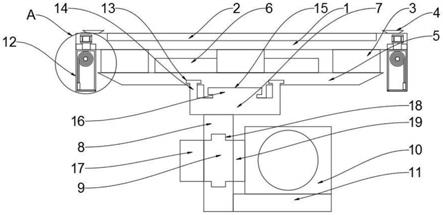
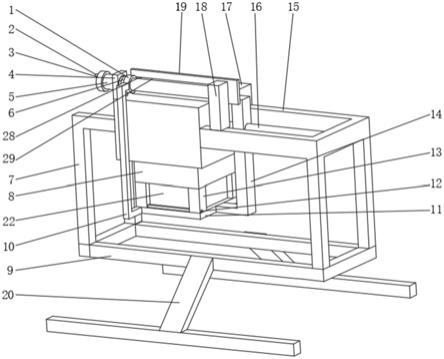
24.图1是本发明无人航空器巡航混合动力系统的整体结构示意图;
25.图2是本发明无人航空器巡航混合动力系统的剖视图;
26.图3是本发明无人航空器巡航混合动力系统中动力传输示意图。
27.附图标记:1、发动机;2、电动机;3、螺旋桨;4、输出轴;5、转子;6、转轴;7、一号单向轴承;8、二号单向轴承。
具体实施方式
28.以下结合附图1
‑
3,进一步说明本发明无人航空器巡航混合动力系统的具体实施方式。本发明无人航空器巡航混合动力系统不限于以下实施例的描述。
29.实施例1:
30.本实施例给出无人航空器巡航混合动力系统的具体结构,如图1
‑
3所示,包括发动机1、电动机2及螺旋桨3,电动机2设置于发动机1和螺旋桨3之间,发动机1的输出轴4与螺旋桨3的转轴6之间通过一号单向轴承7传动连接,电动机2的转子5与螺旋桨3的转轴6之间通过二号单向轴承8传动连接。
31.具体地,发动机1的输出轴4的外圆面与一号单向轴承7的内测滚针无间隙接触连接,一号单向轴承7的钢环外侧面与螺旋桨3的转轴6内圆面过盈配合连接,通过一号单向轴承7的固有单向传动作用,将发动机1的输出轴4的旋转动作传递到转轴6,带动螺旋桨3旋转。
32.进一步的,发动机1停止运行或运行时输出轴4的转速相对于螺旋桨3的转速低的情形,通过一号单向轴承7的固有单向脱离传动作用,将发动机1的输出轴4脱离传动到转轴6,螺旋桨3不受发动机1约束单向自由旋转。
33.具体地,电动机2的转子5的内圆面与二号单向轴承8的钢环外侧面过盈配合连接,二号单向轴承8的内测滚针与转轴6的外圆面无间隙接触连接,通过二号单向轴承8的固有单向传动作用,将电机2的转子5的旋转动作传递到转轴6,带动螺旋桨3旋转。
34.进一步的,电动机2停止运行或运行时转子5的转速相对于螺旋桨3的转速低的情形,通过二号单向轴承8的固有单向脱离传动作用,将电动机2的转子5脱离传动到转轴6,螺旋桨3不受电动机2约束单向自由旋转。
35.进一步的,发动机1和电动机2均停止运行情形,通过一号单向轴承7和二号单向轴承8的固有单向脱离传动作用,螺旋桨3不受发动机1和电动机2约束单向自由旋转,使得无人机拥有螺旋桨3顺桨转动降低滑翔飞行阻力的作用。
36.更进一步的,混合动力系统单独运行发动机工作,使得无人机正常航行的情形,包括:发动机1单独运行驱动螺旋桨3旋转,使得无人机飞行,不因电动机2停止运行带来的附加阻力引起动能损失。
37.更进一步的,混合动力系统单独运行电动机工作,使得无人机正常航行的情形,包括:电动机2单独运行驱动螺旋桨3旋转,使得无人机飞行,不因发动机1停止运行带来的附加阻力引起动能损失。
38.更进一步的,混合动力系统双擎运行工作,使得无人机高功率航行的情形,包括:发动机1和电动机2同时运行驱动螺旋桨3旋转,使得无人机飞行。
39.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。