一种可移动的建筑用3d打印机器人
技术领域
1.本实用新型涉及建筑施工的技术领域,特别是涉及一种可移动的建筑用3d 打印机器人。
背景技术:
2.3d打印即快速成型技术的一种,又称增材制造,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。3d打印在珠宝、工业设计、工程和施工(aec)、汽车,航空航天、牙科和医疗产业、教育、地理信息系统、土木工程以及其他领域都有所应用。建筑行业中,3d打印技术也有所应用。建筑行业中的3d打印机器人,可进行水泥喷涂,但是现有的3d打印机器人在喷涂过程中可能发生倾斜,平稳性较差,导致打印效果较差。
技术实现要素:
3.本实用新型需要解决的技术问题是提供一种可移动的建筑用3d打印机器人,可避免机器人本体倾斜,调节机器人本体的稳定性,进一步保障打印效果。
4.为解决上述技术问题,本实用新型所采取的技术方案如下。
5.一种可移动的建筑用3d打印机器人,包括底座、四组脚轮、机器人本体、伸缩臂、顶盖、多组螺栓、吊绳、重力球、第二吊环、四组点按开关和四组升降装置,底座底端和脚轮顶端固定连接,机器人本体底端和底座顶端固定连接,伸缩臂右端和机器人本体固定连接,伸缩臂底端设有出料嘴,机器人本体内设有与外界相通的空腔,机器人本体顶端设有开口,顶盖通过多组螺栓与机器人本体顶端连接,顶盖底端设有第一吊环,吊绳顶端固定缠绕在第一吊环上,第二吊环固定安装在重力球顶端,吊绳底端固定缠绕在第二吊环上,重力球的前端、后端、左端和右端均设有一组弹性触碰开关,四组点按开关分别安装在机器人本体内壁的前端、后端、左端和右端,并且四组点按开关和四组弹性触碰开关分别对应,四组升降装置分别固定安装在底座底端的前端、后端、左端和右端,并且左侧的弹性触碰开关与右侧的升降装置电连接,右侧的弹性触碰开关与左侧的升降装置电连接,前侧的弹性触碰开关与后侧的升降装置电连接,后侧的弹性触碰开关与前侧的升降装置电连接。
6.本实用新型的一种可移动的建筑用3d打印机器人,其中每组弹性触碰开关还包括弹簧、第一连接座和第二连接座,弹簧固定安装在第一连接座和第二连接座之间,第一连接座固定安装在重力球上。
7.本实用新型的一种可移动的建筑用3d打印机器人,其中每组升降装置还包括支撑架、固定杆、两组第一滑套、气缸、两组连接杆和螺管,支撑架顶端和底座底端固定连接,固定杆固定安装在支撑架内,两组第一滑套均滑动套设在固定杆上,第一滑套顶端设有连接板,气缸固定安装在两组连接板之间,气缸与其对应的点按开关电连接,两组连接杆顶端分别与两组第一滑套底端铰接,两组连接杆底端分别与螺管顶端铰接,支撑架底端设有通孔,螺管可穿过通孔。
8.本实用新型的一种可移动的建筑用3d打印机器人,支撑架内设置有多组滑轨和多组第二滑套,滑轨固定安装在支撑架顶端,两组第二滑套滑动安装在滑轨上,两组连接板顶端分别与两组第二滑套底端固定连接。
9.本实用新型的一种可移动的建筑用3d打印机器人,螺管下方还设置有垫块和螺杆,垫块顶端和螺杆底端固定连接,螺管底端设有螺纹孔,螺杆螺装在螺管内。
10.本实用新型的一种可移动的建筑用3d打印机器人,机器人本体顶端设有多组第三吊环。
11.由于采用了以上技术方案,本实用新型所取得技术进步如下。
12.本实用新型可通过调节伸缩臂的长度,来控制打印的位置,当打印进行时,脚轮转动,并带动整体装置移动,当机器人本体向左倾斜时,由于惯性,重力球向右移动,并使重力球右侧的弹性触碰开关触碰右侧的点按开关,点按开关被开启后,发信号给左侧的升降装置,左侧的升降装置接收到信号后被启动,左侧升降装置升高,使点按开关恢复平稳,避免倾斜,保障打印效果,同样,当机器人本体向右倾斜时,右侧的升降装置可调整自身的高度,当机器人本体向前倾斜时,前侧的升降装置可调整高度,当机器人本体向右倾斜时,后侧的升降装置可调节高度,通过以上设置,可避免机器人本体倾斜,调节机器人本体的稳定性。
附图说明
13.图1是本实用新型的结构示意图;
14.图2是重力球和第二吊环等连接的结构示意图;
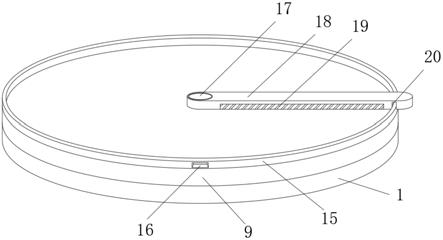
15.图3是图1中局部a的放大结构示意图;
16.图4是第二滑套和连接板等连接的结构示意图;
17.附图中标记:1、底座;2、脚轮;3、机器人本体;4、伸缩臂;5、出料嘴; 6、顶盖;7、螺栓;8、第一吊环;9、吊绳;10、重力球;11、第二吊环;12、弹性触碰开关;13、点按开关;14、升降装置;15、弹簧;16、第一连接座; 17、第二连接座;18、支撑架;19、固定杆;20、第一滑套;21、连接板;22、气缸;23、连接杆;24、螺管;25、滑轨;26、第二滑套;27、垫块;28、螺杆;第三吊环(29)、第三吊环。
具体实施方式
18.下面将结合附图和具体实施方式对本实用新型进行进一步详细说明。
19.一种可移动的建筑用3d打印机器人,其结构如图1至图4所示,包括底座1、四组脚轮2、机器人本体3、伸缩臂4、顶盖6、多组螺栓7、吊绳9、重力球10、第二吊环11、四组点按开关13和四组升降装置14,底座1底端和脚轮2顶端固定连接,机器人本体3底端和底座1顶端固定连接,伸缩臂4右端和机器人本体3固定连接,伸缩臂4底端设有出料嘴5,机器人本体3内设有与外界相通的空腔,机器人本体3顶端设有开口,顶盖6通过多组螺栓7与机器人本体3顶端连接,顶盖6 底端设有第一吊环8,吊绳9顶端固定缠绕在第一吊环8上,第二吊环11固定安装在重力球10顶端,吊绳9底端固定缠绕在第二吊环11上,重力球10的前端、后端、左端和右端均设有一组弹性触碰开关12,四组点按开关13分别安装在机器人本体3内壁的前端、后端、左端和右端,并且四组点按开关13和四组弹性触碰开关 12分别对应,四组升降装置14分别固定安装在底座1底端的前端、后端、左端和右端,并且左侧的弹性触碰开关12与右
侧的升降装置14电连接,右侧的弹性触碰开关12与左侧的升降装置14电连接,前侧的弹性触碰开关12与后侧的升降装置14电连接,后侧的弹性触碰开关12与前侧的升降装置14电连接。
20.弹性触碰开关12包括弹簧15、第一连接座16和第二连接座17,弹簧15固定安装在第一连接座16和第二连接座17之间,第一连接座16固定安装在重力球10 上。当机器人本体3发生倾斜时,重力球10向另一方向移时,第二连接座17可触碰到同侧的点按开关13,同时弹簧15被压缩,防止触碰压力过大,提高稳定性。
21.升降装置14包括支撑架18、固定杆19、两组第一滑套20、气缸22、两组连接杆23和螺管24,支撑架18顶端和底座1底端固定连接,固定杆19固定安装在支撑架18内,两组第一滑套20均滑动套设在固定杆19上,第一滑套20顶端设有连接板21,气缸22固定安装在两组连接板21之间,气缸22与其对应的点按开关13 电连接,两组连接杆23顶端分别与两组第一滑套20底端铰接,两组连接杆23底端分别与螺管24顶端铰接,支撑架18底端设有通孔,螺管24可穿过通孔。启动气缸22,带动两组连接板21相向移动,同时带动两组第一滑套20相向移动,带动两组连接杆23转动,使螺管24向下移动,可使支撑架18升高,从而带动机器人本体3升高。
22.支撑架18内设置有多组滑轨25和多组第二滑套26,可对连接板21的移动起到导向的作用。滑轨25固定安装在支撑架18顶端,两组第二滑套26滑动安装在滑轨25上,两组连接板21顶端分别与两组第二滑套26底端固定连接。
23.螺管24下方还设置有垫块27和螺杆28,垫块27顶端和螺杆28底端固定连接,螺管24底端设有螺纹孔,螺杆28螺装在螺管24内。转动垫块27,带动螺杆28上下移动,可调节螺管24的稳定性。
24.为方便将顶盖6和重力球10等吊起,机器人本体3顶端设有多组第三吊环29。
25.本实用新型工作时,首先水泥通过出料嘴5喷出,可通过调节伸缩臂4的长度,来控制打印的位置,当打印进行时,脚轮2转动,并带动整体装置移动,当机器人本体3向左倾斜时,由于惯性,重力球10向右移动,并使重力球10右侧的第二连接座17触碰到同侧的点按开关13,同时弹簧15被压缩,当点按开关13被开启后,发信号给底座1底端左侧的升降装置14,左侧的升降装置14接收到信号后,启动气缸22,带动两组连接板21相向移动,同时带动两组第一滑套20和两组第二滑套26相向移动,并带动两组连接杆23转动,使螺管24向下移动,可使支撑架18升高,从而带动机器人本体3升高,使点按开关13恢复平稳,避免倾斜,保障打印效果,同样,当机器人本体3向右倾斜时,右侧的升降装置14可调整自身的高度,当机器人本体3向前倾斜时,前侧的升降装置14可调整高度,当机器人本体3向右倾斜时,后侧的升降装置14可调节高度。
26.上述各部件的安装方式、连接方式或设置方式均为常见机械方式,只要能够达成其有益效果的均可进行实施。本实用新型的机器人本体3、重力球10、点按开关13和气缸22为市面上采购,本行业内技术人员只需按照其附带的使用说明书进行安装和操作即可。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。