1.本技术涉及灌胶设备的技术领域,尤其是涉及一种自动灌胶机。
背景技术:
2.真瓷胶是一种反应型双组份美缝产品,适用于陶瓷类或石材类建材的粘接及缝隙的填补美化,真瓷胶包括固化剂和环氧树脂等成分。
3.真瓷胶在出厂前,固化剂和环氧树脂分别通过灌胶机封存在胶瓶内。使用真瓷胶时,利用胶枪将固化剂和环氧树脂分别从胶瓶内打出混合使用。
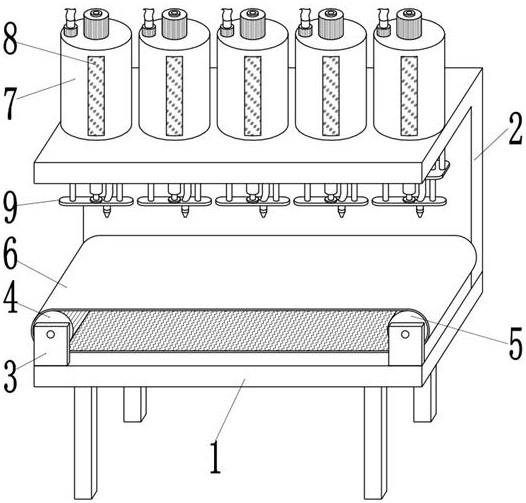
4.参照图1,一种灌胶机包括灌胶组件1,灌胶组件1包括两个储胶斗11、两根注胶管12、以及一个双组份注胶头13,两根注胶管12的一端分别连通于相应的储胶斗11,两根注胶管12的另一端依次连通于双组份注胶头13;
5.灌胶组件1还包括第一电缸14和用于放置胶瓶7的安装座15,第一电缸14的活塞杆固定连接于安装座15,安装座15的运动方向为朝向或远离双组份注胶头13;
6.其一储胶斗11、其一注胶管12、双组份注胶头13以及胶瓶7内部之间形成有第一通道;另一储胶斗11、另一注胶管12、双组份注胶头13以及胶瓶7内部之间形成有第二通道,第一通道不与第二通道连通。
7.针对相关技术,发明人认为:上述灌胶机需要操作人员先将一个胶瓶7放置在安装座15上,后驱动第一电缸14,进而带动安装座15插接连通双组份注胶头13后完成注胶,将胶瓶7取出后需要操作人员重复上述操作才能继续完成另一胶瓶7的注胶,从而提高了操作人员的工作强度。
技术实现要素:
8.为了降低操作人员的工作强度,本技术提供一种自动灌胶机。
9.本技术提供的一种自动灌胶机采用如下的技术方案:
10.一种自动灌胶机,其包括灌胶组件,所述灌胶组件包括双组份注胶头、第一电缸以及安装座,所述第一电缸的活塞杆固定连接于安装座,所述第一电缸的活塞杆和安装座均朝向双组份注胶头,所述双组份注胶头依次连通有注胶管,包括进料组件、抓取组件以及出料组件,所述进料组件包括进料箱、第一活动板件以及第二活动板件,所述进料箱位于安装座上方且顶部和底部均为开口状,所述第一活动板件和第二活动板件上下间隔布置且分别活动穿设于进料箱侧壁;
11.所述抓取组件包括第二电缸、夹爪电缸以及用于抓取完成注胶的胶瓶的抓取件,所述第二电缸的活塞杆固定连接于夹爪电缸;
12.所述出料组件包括第三电缸、旋转电机以及用于放置瓶盖的安装模具,所述第三电缸的活塞杆固定连接于旋转电机,旋转电机的输出轴固定连接于安装模具。
13.通过采用上述技术方案,在进料箱内存放若干胶瓶,使得胶瓶开口朝向双组份注胶头,此时第一活动板件和第二活动板件均处于封闭进料箱的状态,先使得第一活动板件
开启进料箱,且当胶瓶降落至第二活动板件上时第一活动板件重新封闭进料箱,后使得第二活动板件开启进料箱,当胶瓶降落至安装座上时,使得第一活动板件封闭进料箱。然后启动第一电缸,第一电缸驱动安装座朝向双组份注胶头方向运动,且使得胶瓶开口承插双组份注胶头。当胶瓶内同时注满环氧树脂和固化剂后,第一电缸回缩至原来位置,接着启动第二电缸。第二电缸和夹爪电缸共同作用且抓取胶瓶,之后启动第三电缸,第三电缸驱动安装模具朝胶瓶开口方向运动,接着旋转电机驱动安装模具,且使得安装模具将瓶盖旋入胶瓶瓶口,最后完成封口,从而降低操作人员的工作强度。
14.可选的,所述第一活动板件包括第一推动电缸和第一挡板,所述第一推动电缸安装设于进料箱外壁,所述第一推动电缸的活塞杆固定连接于第一挡板一端,所述第一挡板另一端活动穿设进料箱一侧壁。
15.通过采用上述技术方案,启动第一推动电缸,第一推动电缸驱动第一挡板朝远离进料箱方向运动,从而使得进料箱上部内的胶瓶降落至下部。
16.可选的,所述第二活动板件包括第二推动电缸和第二挡板,所述第二推动电缸安装设于进料箱外壁,所述第二推动电缸的活塞杆固定连接于第一挡板一端,所述第一挡板另一端活动穿设进料箱一侧壁。
17.通过采用上述技术方案,启动第二推动电缸,第二推动电缸驱动第二挡板朝远离进料箱方向运动,从而使得进料箱下部的胶瓶降落至安装座。
18.可选的,所述抓取件包括位于上方的第一夹爪和位于下方的第二夹爪,所述第一夹爪固定连接于夹爪电缸,所述第二夹爪转动铰接于夹爪电缸。
19.通过采用上述技术方案,当第二电缸将抓取件推至胶瓶处时,在第二电缸和夹爪电缸共同作用下,第二夹爪向第一夹爪方向转动进而夹紧胶瓶,之后第二电缸驱动夹爪电缸和抓取件回缩一段行程。
20.可选的,所述第一夹爪厚度自靠近安装座向远离安装座的一端逐渐增加,且所述第一夹爪顶部形成有摩擦纹路。
21.通过采用上述技术方案,因为第一夹爪厚度自靠近安装座向远离安装座的一端逐渐增加,所以第一夹爪容易伸入至胶瓶与安装座之间的间隙内,而摩擦纹路可以提高胶瓶与第一夹爪之间的摩擦力,从而使得胶瓶不容易脱离抓取件。
22.可选的,所述安装座底部设有操作台,所述操作台顶部设有第一滑块,所述安装座底部设有第一滑轨,所述第一滑块嵌设于第一滑轨内。
23.通过采用上述技术方案,第一滑块配合第一滑轨,使得安装座容易沿第一滑轨长度方向移动,且在第一滑轨的限位作用下,安装座不容易发生偏移。
24.可选的,所述操作台顶部还设有第二滑轨,所述夹爪电缸底部设有第二滑块,所述第二滑块嵌设于第二滑轨内。
25.通过采用上述技术方案,第二滑块配合第二滑轨,使得夹爪电缸和第二电缸容易沿第二滑轨长度方向移动,且在第二滑轨的限位作用下,安爪电缸和第二电缸不容易发生偏移。
26.可选的,所述注胶管分别设有电磁阀,所述安装座设有用于电磁阀通断的重力传感器。
27.通过采用上述技术方案,当双组份注胶头向胶瓶内灌满环氧树脂和固化剂时,重
力传感器将此时的信号同时传递给两个电磁阀,电磁阀分别阻止注胶管内的环氧树脂和固化剂注入胶瓶。
28.综上所述,本技术包括以下至少一种有益技术效果:
29.1.第一活动板件和第二活动板件可以控制进料箱内的胶瓶掉落至安装座,先在第一电缸、安装座以及双组份注胶头的作用下完成注胶,后在第二电缸、夹爪电缸以及抓取件的作用下抓取安装座上的胶瓶,最后在第三电缸、旋转电机以及安装模具的作用下完成胶瓶封口;
30.2.第一电缸驱动第一挡板朝远离进料箱方向运动,第二推动电缸驱动第二挡板朝远离进料箱方向运动,并最终将进料箱内的胶瓶降落至安装座;
31.3.重力传感器配合电磁阀使用,可以控制注胶管的通断。
附图说明
32.图1是本技术背景技术中灌胶机的结构示意图;
33.图2是本技术实施例的整体结构示意图;
34.图3是本技术实施例不包含操作台和收纳箱的整体结构示意图;
35.图4是图3中a线处的放大结构示意图;
36.图5是图3中b线处的放大结构示意图。
37.附图标记说明:1、灌胶组件;11、储胶斗;12、注胶管;13、双组份注胶头;14、第一电缸;15、安装座;16、第一滑块;17、第一滑轨;18、电磁阀;19、重力传感器;2、进料组件;21、进料箱;22、第一活动板件;221、第一推动电缸;222、第一挡板;23、第二活动板件;231、第二推动电缸;232、第二挡板;24、支撑台;3、抓取组件;31、第二电缸;32、夹爪电缸;33、抓取件;331、第一夹爪;332、第二夹爪;333、摩擦纹路;34、第二滑块;35、第二滑轨;36、第一安装板;4、出料组件;41、第三电缸;42、旋转电机;43、安装模具;44、第三滑块;45、第三滑轨;46、第二安装板;5、操作台;6、收纳箱;7、胶瓶;8、瓶盖。
具体实施方式
38.以下结合附图2
‑
5对本技术作进一步详细说明。
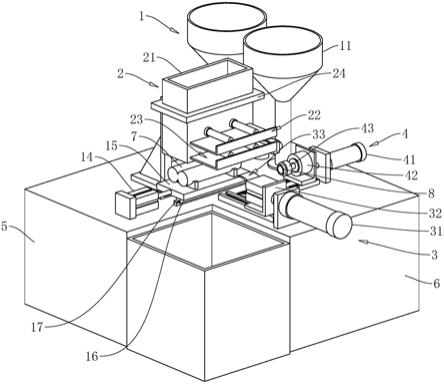
39.本技术实施例公开一种自动灌胶机,参照图2、3,其包括灌胶组件1、进料组件2、抓取组件3、出料组件4、操作台5以及收纳箱6,灌胶组件1、抓取组件3以及出料组件4依次安装在操作台5顶部,进料组件2将胶瓶7运送至灌胶组件1,灌胶组件1完成对胶瓶7的灌胶,灌胶组件1和抓取组件3共同完成抓取胶瓶7动作,出料组件4将抓取组件3上的胶瓶7推至收纳箱6内。
40.灌胶组件1包括两个储胶斗11、两根注胶管12、一个双组份注胶头13、第一电缸14以及安装座15,两个储胶斗11底部固定连接于操作台5顶部。两根注胶管12一端分别固定连通于不同于储胶斗11底部,两根注胶管12另一端依次连通于一个双组份注胶头13的一端,双组份注胶头13的另一端用于往胶瓶7内分别灌输环氧树脂和固化剂。由于一个储胶斗11、一根注胶管12、双组份注胶头13一侧内腔以及胶瓶7一侧内腔之间形成有用于输送环氧树脂的通道,另一储胶斗11、另一注胶管12、双组份注胶头13另一侧内腔以及胶瓶7另一侧内腔之间形成有用于输送固化剂的通道,所以胶瓶7内的环氧树脂和固化剂不会发生反应。当
需要使用胶瓶7内的环氧树脂和固化剂时,可以利用胶枪同时打出环氧树脂和固化剂混合使用。
41.进料组件2包括进料箱21、第一活动板件22、第二活动板件23以及支撑台24,支撑台24固定安装在操作台5顶部,进料箱21固定安装在支撑台24上,且进料箱21顶部和底部均呈开口状。第一活动板件22包括第一推动电缸221和第一挡板222,第一电缸14有两个,两个第一推动电缸221位于同一水平位置间隔布置,且分别固定安装在进料箱21一侧较高的外壁上;第二活动板件23包括第二推动电缸231和第二挡板232,第二推动电缸231有两个,两个第二推动电缸231位于同一水平间隔位置,且分别固定安装在进料箱21一侧较低的外壁上。两个第一电缸14的活塞杆分别固定连接于第一挡板222一端,第一挡板222另一端活动抵接穿过进料箱21一侧壁且碰触进料箱21另一侧内壁。两个第二电缸31的活塞杆分别固定连接于第二挡板232一端,第二挡板232另一端活动抵接穿过进料箱21一侧壁且碰触进料箱21另一侧内壁。
42.进料箱21内部填装有若干胶瓶7,此时第一挡板222和第二挡板232均封闭进料箱21。先启动第一推动电缸221驱动第一挡板222开启进料箱21,当一个胶瓶7降落至第二挡板232时第一挡板222重新封闭进料箱21;后第二推动电缸231驱动第二挡板232开启进料箱21底口,以实现胶瓶7降落至安装座15。
43.抓取组件3包括第二电缸31、夹爪电缸32以及抓取件33,第二电缸31的活塞杆长度方向垂直于第一电缸14的活塞杆长度方向,第二电缸31的活塞杆朝向安装座15的一端固定连接有第一安装板36。第一安装板36呈l形,夹爪电缸32底部固定安装在第一安装板36远离第二电缸31的一端顶部。夹爪电缸32的活塞杆朝向安装座15的方向连接于抓取件33,驱动第二电缸31,且在夹爪电缸32作用下使得抓取件33抓取胶瓶7后回缩一段行程。
44.操作台5顶部沿第一电缸14的活塞杆长方向固定安装有第一滑轨17,第一滑轨17有两个且间隔布置。
45.第一安装板36底部朝安装座15的长度方向固定连接有第二滑块34,第二滑块34有两个且间隔布置。操作台5顶部分别对应两个第二滑块34固定安装有第二滑轨35,两个第二滑块34分别滑动嵌设于第二滑轨35内。
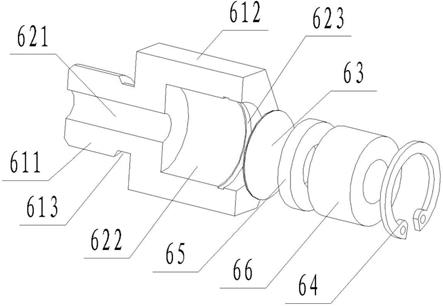
46.出料组件4包括第三电缸41、旋转电机42以及安装模具43,第三电缸41的活塞杆长度方向垂直于夹爪电缸32的活塞杆长度方向,第三电缸41固定安装在操作台5顶部。第三电缸41的活塞杆朝向抓取件33的方向固定连接有第二安装板46,第二安装板46呈l形,旋转电机42底部固定安装在第二安装板46远离第三电缸41的一端顶部。旋转电机42的输出轴固定连接于安装模具43,安装模具43内放置有瓶盖8,先启动第三电缸41,后在旋转电机42的作用下,使得安装模具43内的瓶盖8封住胶瓶7的瓶口。
47.操作台5顶部沿第三电缸41的活塞杆长度方向固定安装有第三滑轨45,第三滑轨45有两根且间隔布置。第二安装板46底部分别对应两根第三滑轨45固定连接有第三滑块44,两个第三滑块44分别滑动嵌设于第三滑轨45内。
48.参照图3、图4,安装座15底部分别对应两个第一滑轨17固定连接有第一滑块16,两个第一滑块16分别滑动嵌设在第一滑轨17内,以实现方便安装座15沿第一滑轨17长度方向运动,且使得胶瓶7的开口承插双组份注胶头13。
49.安装座15底部固定安装有重力传感器19,两根注胶管12分别安装连通有电磁阀
18。当安装座15顶部胶瓶7完成灌胶时,重力传感器19将此时的信号分别传递给两个电磁阀18,两个电磁阀18分别控制输送环氧树脂的通道和输送固化剂的通道同时关闭。
50.参照图3、图5,抓取件33包括第一夹爪331和第二夹爪332,第一夹爪331一端固定连接于夹爪电缸32,第一夹爪331另一端朝向胶瓶7和安装座15之间存在的间隙;第二夹爪332一端转动铰接夹爪电缸32,第二夹爪332另一端转动远离第一夹爪331。在夹爪电缸32和第二电缸31共同作用下,第二夹爪332转动靠近第一夹爪331且夹紧安装座15上的胶瓶7后回缩。第一夹爪331厚度自靠近夹爪电缸32的一端向远离夹爪电缸32的一端逐渐递减,且第一夹爪331顶部形成有摩擦纹路333,摩擦纹路333可以增加胶瓶7与第一夹爪331之间的摩擦力,以实现胶瓶7抓取过程中不容易脱离。
51.本技术实施例的实施原理如下:
52.步骤一,向两个储胶斗11内分别填装环氧树脂和固化剂,向进料箱21内填装若干胶瓶7;
53.步骤二,启动第一推动电缸221,其一胶瓶7掉落至第一挡板222时即停止第一推动电缸221,启动第二推动电缸231后其一胶瓶7掉落至安装座15上;
54.步骤三,启动第一电缸14,安装座15和安装座15上的胶瓶7朝向双组份注胶头13运动,当胶瓶7开口内壁插入双组份注胶头13外壁时停止第一电缸14,在重力传感器19作用下第一电磁阀18开启且向胶瓶7内灌注环氧树脂和固化剂;
55.步骤四,胶瓶7填装环氧树脂和固化剂完毕后,第一电缸14回缩至原来位置后启动第二电缸31,夹爪电缸32配合第二电缸31抓取胶瓶7;
56.步骤五,启动第三电缸41,旋转电机42驱动安装模具43将瓶盖8封住胶瓶7瓶口,最后第三电缸41继续前进且夹紧电缸松开第一夹爪331;
57.最后胶瓶7和瓶盖8掉落至收纳箱6内。
58.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。