1.本发明属于智能健身技术领域,具体涉及一种基于电子配重行程发力的辅助训练方法及健身设备。
背景技术:
2.规律的体育活动可以改善心肺功能,降低冠心病、高血压、糖尿病等疾病的发病率,同时可以增强骨密度、减缓骨质疏松的进展,减轻压力,保持心情愉悦等,因此,越来越受到人们的重视。随着计算机技术的发展以及机器学习技术的兴起,运动识别技术可对专业技术动作进行分析、评估及辅助训练,通过不断的练习、纠正达到标准的动作主要用于体育及舞蹈等专业人员的训练。目前,普通人员在训练中单凭教练员的肉眼和经验对训练动作进行评估,或者训练幅度过小不能达到训练要求,或者训练幅度过大对训练人员造成一定的伤害,很难既免受伤害又达到想要的训练效果,再者,每个训练人员的身体素质不同,所设定的目标也不同,因此,很难实现每个训练人员都能达到想要的训练效果。
技术实现要素:
3.为解决现有技术中存在的上述技术问题,提供一种基于电子配重行程发力的辅助训练方法及健身设备,通过获取训练人员选取的行程辅助力量训练模式,通过获取训练人员的身高、本次训练动作类型及训练人员极限拉力值,或获取训练人员通过语音或悬停等方式直接输入主机的各行程阶段数值,通过主机内设有的处理器依据储存的设定信息,通过运动控制器控制配重电机施加至拉绳以相应的配重,依据预设的行程分段信息及动态发力模型,经过准备阶段、起始阶段、训练行程阶段、结束阶段、结束延续阶段,当训练动作处于结束行程阶段时,极限拉力持续至结束延续阶段,使得训练根据自身的情况设定,既达到有效的训练效果,也有效避免训练人员的伤害。
4.为实现上述发明目的,本发明的技术方案是:
5.一种基于电子配重行程发力的辅助训练方法,包括如下步骤:
6.步骤1:获取用户在主机显示屏上选取的辅助训练模式;
7.步骤2:获取用户输入的身高、本次训练动作类型及训练者极限拉力值,或用户直接输入的各行程阶段数据信息,形成相应拉绳的动态行程的动态发力模型;
8.步骤3:施加至拉绳以相应的配重,主机获取拉绳行程传感器发送的不同行程数据,依据预设的行程分段信息及动态发力模型,主机调整发力器的发力大小。
9.优选地,还包括步骤2
‑
1:动态发力模型与拉绳的动态行程存在函数关系,按照公式p=k w(l)计算,
10.其中,
11.p—为伺服电机向拉绳施加的拉力,单位为kg;
12.k—为预先设定的固定重量,单位为kg;
13.w(l)—为与拉绳当前拉出行程l关联的函数曲线。
14.进一步地,当辅助力量训练过程处于准备位置时,训练者就位,辅助发力装置不予施力或发出微力,使得训练者能够轻松将拉绳拉到最佳的动作初始位置,所述拉绳在训练行程初始位置f点的行程l
f
按照公式l
f
=m (t/t
‑
1)计算;
15.其中,m
‑
基于标准身材、标准站位为当前训练动作预先设置的标准出绳量,单位为cm;
16.t
‑
标准身高,单位为cm;
17.t
‑
当前训练者的身高,单位为cm。
18.进一步地,当拉绳处于前训练动作的起始位置时,所述辅助发力装置对所述拉绳施加迅速上升的拉力并使所述拉绳延伸至设定的长度,使得训练者感受到高强度力量训练的开始。
19.进一步地,当训练者开始高强度力量训练时,所述辅助发力装置对所述拉绳施加预设的恒定拉力,使得所述拉绳继续延伸直至设定长度,使得训练者完成高强度力量训练;
20.训练者在高强度力量训练结束时所述拉绳在训练行程位置q点的行程l
q
按照公式l
q
=n (t/t
‑
1)计算:
21.其中,n
‑
基于标准身材、标准站位为当前训练动作预先设置的标准结
22.束位置行程,单位为cm;
23.t
‑
标准身高,单位为cm;
24.t
‑
当前训练者的身高,单位为cm。
25.进一步地,当训练者完成高强度力量训练时,所述辅助发力装置先对所述拉绳施加预设的突增拉力,使所述拉绳继续延伸少许,提醒训练者当前动作已到位。
26.进一步地,当训练者训练动作已到位时,所述辅助发力装置对所述拉绳施加预设的最高恒定拉力,所述拉绳继续拉伸至预设结束位置,使得训练者免受伤害。
27.本发明还提供一种基于电子配重行程发力的辅助训练的健身设备,包括固装在地面或墙面上的主题框架,所述主题框架中部设有主机及操作显示屏,所述主题框架四角通过活动拉绳连有牵拉元件,且所述拉绳上均装有行程传感器。
28.优选地,所述主机内设有储存信息的处理器、控制拉绳移动的移位控制装置、辅助力量训练的配重电机及运动控制器,所述运动控制器依据处理器储有的行程辅助力量训练模式、本次训练动作类型及接收到的所述行程传感器传送的数据信息,控制配重电机辅助力量进行训练。
29.进一步地,所述配重电机包括伺服电机。
30.需要说明的是,训练人员可通过身高、极限拉力等数据的输入,经主机中的处理器计算形成动态发力模型;也可以由训练人员将辅助训练各行程阶段的数据直接输入到主机储存,以形成相应的动态发力模型,所述训练人员输入数据的方式包括蓝牙、语音、sui界面输入、app界面输入、脚控和将拉绳悬停在各训练阶段位置后经摄像头传感器识别传输等方式中的至少一种。
31.与现有技术相比较,本发明具有如下的有益效果:
32.本发明提供一种基于电子配重行程发力的辅助训练方法及健身设备,通过获取训练人员选取的行程辅助力量训练模式,及训练人员的身高、本次训练动作类型及训练人员极限拉力值,或获取训练人员通过语音或悬停等方式直接输入主机的各行程阶段的数值,
通过主机内设有的处理器依据储存的设定信息,通过运动控制器控制配重电机施加至拉绳以相应的配重,依据预设的行程分段信息及动态发力模型,经过准备阶段、起始阶段、训练行程阶段、结束阶段、结束延续阶段,当训练动作处于结束行程阶段时,极限拉力持续至结束延续阶段,使得训练根据自身的情况设定,既达到有效的训练效果,也有效避免训练人员的伤害。
附图说明
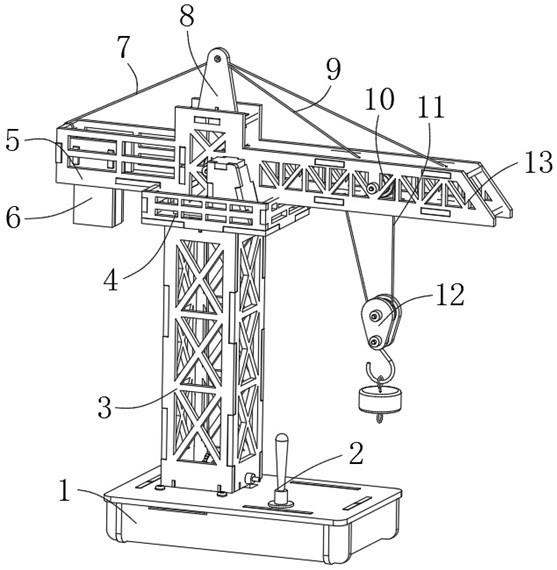
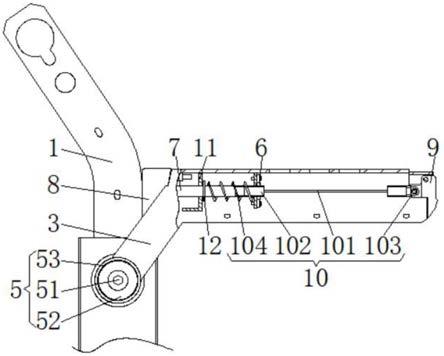
33.图1为本发明方案一种优选实施例中健身设备的结构示意图;
34.图2为本发明方案一种优选实施例中基于电子配重行程发力的辅助训练控制流程图;
35.图3为本发明方案一种优选实施例中动态发力模型与拉绳的动态行程之间的函数关系。
36.其中:1
‑
主题框架;
[0037]2‑
左上拉手;21
‑
左上拉绳;
[0038]3‑
显示屏;4
‑
左上拉绳传感器;5
‑
左下拉绳传感器;6
‑
伺服电机;7
‑
左下拉手;71
‑
左下拉绳;
[0039]8‑
主机;9
‑
电机控制单元;
[0040]
10
‑
右下拉手;101
‑
右下拉绳;
[0041]
11
‑
右下拉绳传感器;12
‑
右上拉绳传感器;
[0042]
13
‑
右上拉手;131
‑
右上拉绳;
[0043]
14
‑
储存模块;15
‑
处理器;
[0044]
151
‑
计算模块;152
‑
控制模块;
[0045]
16
‑
移位控制单元。
具体实施方式
[0046]
如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本技术的较佳实施方式,然所述描述乃以说明本技术的一般原则为目的,并非用以限定本技术的范围。本技术的保护范围当视所附权利要求所界定者为准。
[0047]
参照图1
‑
3所示:
[0048]
本发明第一实施例:
[0049]
本发明提供一种基于电子配重的行程辅助力量训练的健身设备,包括固装在地面或墙面上的主题框架1,所述主题框架1中部设有主机8及用于操作的显示屏3,所述主题框架1四角分别通过左上拉绳21及相连的左上拉绳传感器4连接有左上拉手2;右上拉绳131及相连的右上拉绳传感器12连接有右上拉手13,右下拉绳101及相连的右下拉绳传感器11连接有右下拉手10;左下拉绳71及相连的左下拉绳传感器5连接有左下拉手7。
[0050]
优选地,所述主机8内设有储存信息的储存模块14、设有处理数据信息及控制动作的处理器15、控制拉绳移动的移位控制单元16、辅助力量训练的伺服电机6及电机控制单元9,所述电机控制单元9依据储存模块14储有的行程辅助力量训练模式、本次训练动作类型及接收到的所述行程传感器传送的数据信息控制伺服电机6输送力量以辅助训练。
[0051]
本发明第二实施例:
[0052]
本发明还公开了一种基于电子配重行程发力的辅助训练方法,训练者拉动包括连接右上拉绳131的右上拉手13、连接左上拉绳21的左上拉手2;包括如下步骤:
[0053]
步骤1:主机8获取用户在主机8显示屏3上选取的行程辅助力量训练模式,并储存在储存模块14中;
[0054]
步骤2:主机8获取用户在主机8显示屏3上输入的身高、本次训练动作类型为双手分别向下拉动左上拉手2、右上拉手13及用户能够达到的极限拉力值,通过处理器15中的计算模块151形成相应拉绳行程的动态发力模型,并储存在储存模块14中;
[0055]
动态发力模型与拉绳的动态行程存在函数关系,按照公式p=k w(l)计算;
[0056]
其中,
[0057]
p—为伺服电机向拉绳施加的拉力,单位为kg;
[0058]
k—为预先设定的固定重量,单位为kg;
[0059]
w(l)为与拉绳当前拉出行程l关联的函数曲线。
[0060]
步骤3:依据计算模块151提供的配重值k,伺服电机6施加至所述右上拉绳131及所述左上拉绳21分别以相应的配重k。
[0061]
如图3,当辅助力量训练过程处于准备位置时,训练者就位,伺服电机6不予施力或发出约5n的微力,该微力使得拉绳基本不吃力,训练者能够轻松将右上拉绳131、左上拉绳21拉到最佳的动作初始位置f点。
[0062]
所述右上拉绳131、左上拉绳21在训练行程初始位置f点的行程l
(f)
均按照公式l
f
=m (t/t
‑
1)计算:
[0063]
其中,
[0064]
l
f
‑
为拉绳在初始位置f点的行程,单位为cm;
[0065]
m
‑
基于标准身材、标准站位为当前训练动作预先设置的标准出绳量,单位为cm;
[0066]
t
‑
标准身高,单位为cm;
[0067]
t
‑
当前训练者的身高,单位为cm。
[0068]
优选地,当右上拉绳131、左上拉绳21处于当前训练动作的起始位置f点时,所述主机8获取右上拉绳131的右上拉绳传感器12、左上拉绳21的左上拉绳传感器4发送的已处于行程分段区间a末端的信息时,主机8内设有的控制模块152与电机控制单元9相连接,电机控制单元9控制伺服电机6分别对所述右上拉绳131、所述左上拉绳21施加设定的辅助拉力,控制模块152与移位控制单元16连接,所述移位控制单元16控制所述右上拉绳131及所述左上拉绳21延伸,延伸长度为设定的区间b,使得训练者感受到高强度力量训练的开始。
[0069]
优选地,当训练者开始高强度力量训练时,控制模块152驱使电机控制单元9控制伺服电机6对所述右上拉绳131、所述左上拉绳21施加设定的恒定拉力,控制模块152驱使移位控制单元16控制所述右上拉绳131、所述左上拉绳21均继续延伸直至设定长度,延伸长度为设定的区间c,使得训练者完成高强度力量训练;
[0070]
训练者在高强度力量训练结束时所述拉绳在训练行程位置q点的行程l
q
按照公式l
q
=n (t/t
‑
1)计算;
[0071]
其中,
[0072]
n
‑
基于标准身材、标准站位为当前训练动作预先设置的标准结束位置
[0073]
行程,单位为cm;
[0074]
t
‑
标准身高,单位为cm;
[0075]
t
‑
当前训练者的身高,单位为cm。
[0076]
优选地,当训练者完成高强度力量训练时,所述控制模块152驱使电机控制单元9控制伺服电机6先对所述右上拉绳131、所述左上拉绳21施加预设的突增拉力,移位控制单元16控制所述右上拉绳131、所述左上拉绳21均继续延伸少许,延伸长度为设定的区间d,提醒训练者当前动作已到位。
[0077]
优选地,当训练者训练动作已到位,即所述右上拉绳131、所述左上拉绳21均已到区间d末端时,所述控制模块152控制所述伺服电机6对所述右上拉绳131、所述左上拉绳21施加预设的最高恒定拉力,所述移位控制单元16控制所述右上拉绳131、所述左上拉绳21均继续延伸,延伸长度为设定的区间e,最后,所述控制模块152控制所述伺服电机6撤除施加到所述右上拉绳131、所述左上拉绳21上的辅助力,使得训练者免受伤害。
[0078]
本发明第三实施例:
[0079]
本发明还公开了一种基于电子配重行程发力的辅助训练方法,训练者拉动包括连接右下拉绳101的右下拉手10、连接左下拉绳71的左下拉手7;包括如下步骤:
[0080]
步骤1:训练者通过蓝牙、语音、sui界面输入、app界面输入;将拉绳悬停在各训练阶段位置后经摄像头传感器(图中未示出)识别传输等方式中的至少一种,将辅助训练各行程阶段的数据信息直接存入到主机8中的储存模块14中,经处理器15处理后形成相应拉绳行程的动态发力模型并储存。
[0081]
步骤2:依据处理器15提供的配重值k,伺服电机6施加至左下拉绳71;右下拉绳101分别以相应的配重k。
[0082]
如图3,当辅助力量训练过程处于准备位置时,训练者就位,伺服电机6不予施力,训练者能够轻松将左下拉绳71、右下拉绳101拉到训练者输入的动作初始位置f点。
[0083]
优选地,当左下拉绳71、右下拉绳101处于当前训练动作的起始位置f点时,所述主机8获取右下拉绳101的右下拉绳传感器11、左下拉绳71的左下拉绳传感器5发送的已处于行程分段区间a末端的信息时,主机8内设有的控制模块152与电机控制单元9相连接,电机控制单元9控制伺服电机6分别对所述左下拉绳71、右下拉绳101施加设定的辅助拉力,控制模块152与移位控制单元16连接,所述移位控制单元16控制左下拉绳71及右下拉绳101延伸,延伸长度为设定的区间b,使得训练者感受到高强度力量训练的开始。
[0084]
优选地,当训练者开始高强度力量训练时,控制模块152驱使电机控制单元9控制伺服电机6对所述左下拉绳71、右下拉绳101施加设定的恒定拉力,控制模块152驱使移位控制单元16控制所述左下拉绳71、右下拉绳101均继续延伸直至训练者输入的高强度力量训练末端位置q点,延伸长度为设定的区间c,使得训练者完成高强度力量训练。
[0085]
优选地,当训练者完成高强度力量训练时,所述控制模块152驱使电机控制单元9控制伺服电机6先对所述左下拉绳71、右下拉绳101施加预设的突增拉力,移位控制单元16
控制用户只能拉出少许绳索以保护避免过度运动,以提示用户此动作训练达标,也可以通过主机界面元素或者系统警报语音(图中未示出)提示用户此动作训练达标提醒。
[0086]
优选地,当训练者训练动作已到位,即所述左下拉绳71、右下拉绳101均已到区间d末端时,所述控制模块152控制所述伺服电机6对所述左下拉绳71、右下拉绳101施加预设的最高恒定拉力,所述移位控制单元16控制所述左下拉绳71、右下拉绳101均继续延伸,延伸长度为设定的区间e,最后,所述控制模块152控制所述伺服电机6撤除施加到所述左下拉绳71、右下拉绳101上的辅助力,使得训练者免受伤害。
[0087]
上述说明示出并描述了本技术的若干优选实施例,但如前所述,应当理解本技术并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述申请构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本技术的精神和范围,则都应在本技术所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。