本实用新型涉及stm探针制备装置技术领域,尤其涉及一种stm探针针尖制备装置的探针往复推动机构。
背景技术:
高质量的扫描探针是保证扫描隧道显微镜的超高分辨率的关键。扫描隧道显微镜(scanningtunnelingmicr-osco-py,stm)具有超高的分辨率,在材料分析和表征上具有广泛的应用。stm的分辨率与其探针几何形状密切相关。stm探针通常采用铂铱合金丝或高纯度的钨丝来制备,针尖顶端的原子个数越少,成像的分辨率就越高,完全理想状况下针尖顶端只有一个稳定的原子。stm探针的制备方法有很多偶然性和不确定因素,这些因素增加了制备高质量针尖的难度。人们通常采用机械剪切的方法制备铂铱合金丝探针,但机械剪切方法的重复性很低,不容易制备高质量的探针。为了获得稳定的隧道电流和高质量、高分辨率的stm图像,探索可重复、高质量探针制备方法是stm扫描工作的一个非常关键的问题。
现有的stm探针制备方法中,水平电化学液膜法腐蚀制备stm探针在避免以上缺陷的同时,还大幅度提高了制作高质量stm探针的成功率,其实际扫描结果也印证了这一点。现有的水平电化学液膜法制备探针,所使用的装置的结构为:调节显微镜观察台上有一依赖齿轮带动的左右调节旋钮,可使载玻片左右移动,进而带动固定在金属块上的钨丝在通电的钨丝圈内同向自由移动。这个探针移动装置的作用是使腐蚀过程均匀地进行,获得形状对称的针尖。在制备针尖过程中,首先调节显微镜观察台的上下旋钮,使待腐蚀的钨丝清晰地出现在显微镜的可观测视场中,调节腐蚀圈到显微镜视场边缘,使钨丝正好穿过腐蚀圈的正中心;其次用滴管将过饱和naoh腐蚀溶液液滴套在腐蚀圈上,通过滴管仔细修整naoh溶液液泡的厚薄,使得腐蚀圈上形成极薄的naoh溶液液膜。当naoh溶液液膜由于电化学腐蚀反应而产生破裂时,用类似方法挂上液膜,直到制备过程结束。在腐蚀过程中根据钨丝的腐蚀状态将电源电压调至合适的电压值(1.5v~3.0v)。电化学腐蚀开始时,点触电源开关,液泡内的钨丝会与naoh腐蚀液发生化学反应,此时应该连续、反复微调显微镜的左右调节旋钮,使钨丝在液泡内微距离左右移动。
现有的水平电化学液膜法腐蚀制备stm探针装置存在以下问题,
1、浪费人力,电化学腐蚀开始以后,需要一个人守在装置旁边长时间连续、反复手动微调显微镜的左右调节旋钮,使钨丝在液泡内微距离左右移动;
2、使stm探针制备的可重复性和精度变差,由于人手动操作每次使力和时间控制都靠感觉,操作的精度和重复性都较差,导致钨丝在液泡内每次左右移动的距离都不同,并且人工作时间一长会疲惫,导致出错率上升,使得stm探针制备的可重复性和精度变差。
为了解决上述问题,申请人研制了一种stm探针针尖制备装置,使用电动伸缩机构替代人力带动探针在液泡内微距离左右移动,但是现有的电动伸缩机构如直线电机伸缩时不能同时满足高精度和低速下运行的要求,达不到探针针尖制作时条件,现急需一种同时满足高精度和低速下运行的要求的往复推动机构。
技术实现要素:
为了解决以上现有技术的缺点和不足之处,本实用新型的目的是提供一种stm探针针尖制备装置的探针往复推动机构。
本实用新型的技术方案是:一种stm探针针尖制备装置的探针往复推动机构,包括:
底座;
伸缩机构本体,所述伸缩机构本体固定连接在底座上,伸缩机构本体上设有螺纹孔;
丝杆,所述丝杆与螺纹孔相匹配,丝杆螺纹连接在螺纹孔上,丝杆右端与探针夹持座连接;
正多边形杆,所述正多边形杆固定连接在丝杆右端,正多边形杆的外接圆柱与丝杆同轴;
步进电机,所述步进电机固定连接底座上,步进电机位于伸缩机构本体右侧,步进电机的转轴上开有于正多边形杆相匹配的正多边形孔,步进电机转轴与正多边形孔的外接圆同轴,正多边形孔的外接圆柱与正多边形杆的外接圆柱同轴,正多边形杆插入正多边形孔中,步进电机与控制器电连接。
进一步地,还包括:
控制器,所述控制器与步进电机电连接;
控制按钮,所述控制按钮与控制器电连接,控制按钮控制步进电机在停止、左右反复伸缩、收缩和伸长状态之间转换。
进一步地,还包括:
探针夹持座,所述探针夹持座上设有与探针相匹配的探针夹持孔,探针夹持孔与探针相匹配,探针夹持孔的中轴线与金属圈所在的平面垂直,探针夹持孔中轴线通过金属圈的中心点,探针夹持座与直流电源负极电连接,探针夹持座与丝杆连接;
导杆,所述导杆包括3根,导杆一端固定连接在伸缩机构本体右侧面,导杆与螺纹孔中轴线平行,3根导杆绕螺纹孔中轴线均匀分布;
导孔,所述导孔包括3个,导孔开设在探针夹持座上,3个导孔绕探针夹持孔均匀分布,导孔与导杆相匹配,探针夹持座通过导孔与导杆的配合左右滑动安装在导杆上。
进一步地,还包括:
永磁体,所述永磁体固定连接在丝杆右端,探针夹持座为铁磁性材料,探针夹持座与永磁体磁吸连接。
进一步地,所述探针夹持座包括:
接触板;
夹接件,所述夹接件圆台型,夹接件的外径从左到右逐渐增大,夹接件固定连接在接触板右侧,探针夹持孔开设在夹接件右侧面,夹接件侧部开有内外壁贯通的缝隙,夹接件侧壁开有从夹接件左端到右端的螺纹;
紧固螺栓,所述紧固螺栓螺纹连接在夹接件外侧面,紧固螺栓内径大于夹接件最小外径,紧固螺栓内径小于夹接件最大外径。
本实用新型的有益效果是:与现有技术相比,
1)本实用新型通过步进电机转动带动丝杆在收缩机构本体上的螺纹孔内旋转,使得丝杆左右移动,将丝杆转动转化为左右方向的运动,控制精度更高,并且左右运动的速度较低,满足探针针尖制作时对控制精度和低速的要求;另外本实用新型中使用时由于丝杆右端通过正多边形杆插入步进电机转轴上的正多边形孔中,使得步进电机转动能够带动丝杆转动的同时丝杆左右移动不会影响步进电机;
2)本实用新型通过控制按钮向控制器发送不同的信号,例如按压次数或时长,控制器通过不同的信号识别控制按钮指令,控制器根据识别的指令控制步进电机正转反转,替代人手微调显微镜的左右调节旋钮,控制更加精度和可重复性更高;
3)本使用新型通过将探针夹持座上的导孔滑动连接在导杆上,使得探针夹持座相对于中心不会转动,避免了探针转动导致对针尖的电化学腐蚀精度降低;
4)本实用新型通过将永磁体固定连接在丝杆右端,使探针夹持座为铁磁性材料,探针夹持座与永磁体磁吸连接,相比传统方式丝杆与夹持座转动连接,使得丝杆与探针夹持座间的连接结构更加简单,就算有磨损,由于磁吸作用,探针夹持座随时都是紧贴丝杆的,不会产生丝杆移动探针夹持座会延迟一段时间才被带动移动的现象,控制探针左右往复微距运动的精度得到提高,并且抗磨损能力更强;
5)本实用新型将探针夹持座的夹接件设计为圆台形,并且夹接件表面开有螺纹,夹接件侧部开设内外壁贯通的缝隙,使用紧固螺栓螺纹连接在夹接件外表面,由于紧固螺栓内径大于夹接件最小外径,紧固螺栓内径小于夹接件最大外径,当紧固螺栓旋转靠近右侧时夹接件内径减小将探针夹紧,当紧固螺栓旋转靠近左侧时夹接件内径增大将探针松开。
附图说明
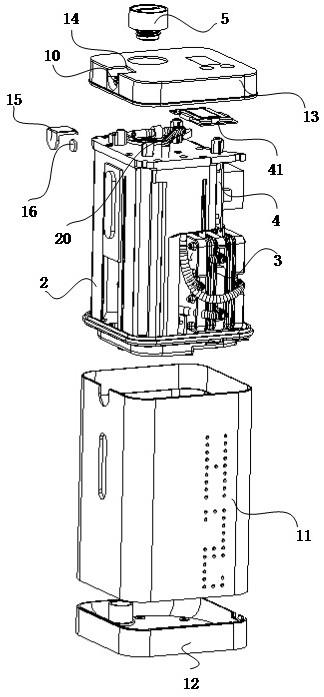
图1为本实用新型的立体视图;
图2为本实用新型的爆炸视图;
图3为图2中g处的局部视图;
图4为图2中h处的局部视图;
图5为本实用新型的前视图;
图6为本实用新型的俯视图;
图7为图6中b-b剖面线的剖视图。
图8为图7中f处的局部视图;
图9为本实用新型另一视角的立体视图;
图10为图9中e处的局部视图;
图11为本实用新型金属圈处的电路连接示意图;
图12为本实用新型的电路连接框图。
具体实施方式
下面结合附图及具体的实施例对实用新型进行进一步介绍:
实施实例1:本实施例一种stm探针针尖制备装置的探针往复推动机构,包括:底座2;伸缩机构本体6-4,所述伸缩机构本体6-4焊接连接在底座2上,伸缩机构本体6-4上设有螺纹孔6-4-1;丝杆6-2,所述丝杆6-2与螺纹孔6-4-1相匹配,丝杆6-2螺纹连接在螺纹孔6-4-1上,丝杆6-2右端与探针夹持座4连接;正多边形杆6-3,所述正多边形杆6-3焊接连接在丝杆6-2右端,正多边形杆6-3的外接圆柱与丝杆6-2同轴;步进电机6-1,所述步进电机6-1焊接连接底座2上,步进电机6-1位于伸缩机构本体6-4右侧,步进电机6-1的转轴上开有于正多边形杆6-3相匹配的正多边形孔6-1-1,步进电机6-1转轴与正多边形孔6-1-1的外接圆同轴,正多边形孔6-1-1的外接圆柱与正多边形杆6-3的外接圆柱同轴,正多边形杆6-3插入正多边形孔6-1-1中,步进电机6-1与控制器17导线连接。
进一步地,还包括:控制器17,所述控制器17与步进电机6-1导线连接;控制按钮18,所述控制按钮18与控制器17导线连接,控制按钮18控制步进电机6-1在停止、左右反复伸缩、收缩和伸长状态之间转换。这里的控制器17可采用plc、arduino或树莓派等带外围电路的控制组件。
进一步地,还包括:探针夹持座4,所述探针夹持座4上设有与探针相匹配的探针夹持孔4-2-1,探针夹持孔4-2-1与探针相匹配,探针夹持孔4-2-1的中轴线与金属圈3所在的平面垂直,探针夹持孔4-2-1中轴线通过金属圈3的中心点,探针夹持座4与直流电源1负极导线连接,探针夹持座4与丝杆6-2连接;导杆6-4-2,所述导杆6-4-2包括3根,导杆6-4-2一端焊接连接在伸缩机构本体6-4右侧面,导杆6-4-2与螺纹孔6-4-1中轴线平行,3根导杆6-4-2绕螺纹孔6-4-1中轴线均匀分布;导孔4-4,所述导孔4-4包括3个,导孔4-4开设在探针夹持座4上,3个导孔4-4绕探针夹持孔4-2-1均匀分布,导孔4-4与导杆6-4-2相匹配,探针夹持座4通过导孔4-4与导杆6-4-2的配合左右滑动安装在导杆6-4-2上。
进一步地,还包括:永磁体6-5,所述永磁体6-5粘接连接或螺栓连接在丝杆6-2右端,探针夹持座4为铁磁性材料,探针夹持座4与永磁体6-5磁吸连接。
进一步地,所述探针夹持座4包括:接触板4-1;夹接件4-2,所述夹接件4-2圆台型,夹接件4-2的外径从左到右逐渐增大,夹接件4-2焊接连接在接触板4-1右侧,探针夹持孔4-2-1开设在夹接件4-2右侧面,夹接件4-2侧部开有内外壁贯通的缝隙4-2-2,夹接件4-2侧壁开有从夹接件4-2左端到右端的螺纹;紧固螺栓4-3,所述紧固螺栓4-3螺纹连接在夹接件4-2外侧面,紧固螺栓4-3内径大于夹接件4-2最小外径,紧固螺栓4-3内径小于夹接件4-2最大外径。
实施实例2:本实施例一种stm探针针尖制备装置,包括:直流电源1;底座2;金属圈3,所述金属圈3为圆形,金属圈3通过支架焊接连接在底座2上,金属圈3位于探针夹持孔4-2-1正前方,金属圈3与直流电源1的正极导线连接;轻触开关19,所述轻触开关19串联在金属圈3与直流电源1之间;探针夹持座4,所述探针夹持座4上设有与探针相匹配的探针夹持孔4-2-1,探针夹持孔4-2-1与探针相匹配,探针夹持孔4-2-1的中轴线与金属圈3所在的平面垂直,探针夹持孔4-2-1中轴线通过金属圈3的中心点,探针夹持座4与直流电源1负极导线连接;显微镜7,所述显微镜7设置在金属圈3侧部,显微镜7视场覆盖金属圈3的中点;电动伸缩机构6,所述电动伸缩机构6焊接连接在底座2上,电动伸缩机构6与探针夹持座4连接,电动伸缩机构6的伸缩使得探针夹持座4左右移动;控制器17,所述控制器17与电动伸缩机构6导线连接;控制按钮18,所述控制按钮18与控制器17导线连接,控制按钮18控制电动伸缩机构6在停止、左右反复伸缩、收缩和伸长状态之间转换。这里的控制器17可采用plc、arduino或树莓派等带外围电路的控制组件。这里的金属圈3可采用钨丝圈。轻触开关19为带状态回复功能的开关。电动伸缩机构6可采用直线电机或电动伸缩杆。
使用时,通过控制按钮18不同的按压状态,例如按压次数或按压时长,控制器17识别控制按钮18的不同指令,电化学腐蚀开始时,点触轻触开关19,液泡内的钨丝会与naoh腐蚀液发生化学反应,此时通过控制按钮18向控制器发送左右反复伸缩指令,控制电动伸缩机构6推动夹持钨丝的探针夹持座4夹持钨丝在液泡内微距离左右移动。
进一步地,所述电动伸缩机构6包括:伸缩机构本体6-4,所述伸缩机构本体6-4焊接连接在底座2上,伸缩机构本体6-4上设有螺纹孔6-4-1;丝杆6-2,所述丝杆6-2与螺纹孔6-4-1相匹配,丝杆6-2螺纹连接在螺纹孔6-4-1上,丝杆6-2右端与探针夹持座4连接;正多边形杆6-3,所述正多边形杆6-3焊接连接在丝杆6-2右端,正多边形杆6-3的外接圆柱与丝杆6-2同轴;步进电机6-1,所述步进电机6-1焊接连接底座2上,步进电机6-1位于伸缩机构本体6-4右侧,步进电机6-1的转轴上开有于正多边形杆6-3相匹配的正多边形孔6-1-1,步进电机6-1转轴与正多边形孔6-1-1的外接圆同轴,正多边形孔6-1-1的外接圆柱与正多边形杆6-3的外接圆柱同轴,正多边形杆6-3插入正多边形孔6-1-1中,步进电机6-1与控制器17导线连接;导杆6-4-2,所述导杆6-4-2包括3根,导杆6-4-2一端焊接连接在伸缩机构本体6-4右侧面,导杆6-4-2与螺纹孔6-4-1中轴线平行,3根导杆6-4-2绕螺纹孔6-4-1中轴线均匀分布;导孔4-4,所述导孔4-4包括3个,导孔4-4开设在探针夹持座4上,3个导孔4-4绕探针夹持孔4-2-1均匀分布,导孔4-4与导杆6-4-2相匹配,探针夹持座4通过导孔4-4与导杆6-4-2的配合左右滑动安装在导杆6-4-2上。
进一步地,还包括:永磁体6-5,所述永磁体6-5粘接连接在丝杆6-2右端,探针夹持座4为铁磁性材料,探针夹持座4与永磁体6-5磁吸连接。
进一步地,所述探针夹持座4包括:接触板4-1;夹接件4-2,所述夹接件4-2圆台型,夹接件4-2的外径从左到右逐渐增大,夹接件4-2焊接连接在接触板4-1右侧,探针夹持孔4-2-1开设在夹接件4-2右侧面,夹接件4-2侧部开有内外壁贯通的缝隙4-2-2,夹接件4-2侧壁开有从夹接件4-2左端到右端的螺纹;紧固螺栓4-3,所述紧固螺栓4-3螺纹连接在夹接件4-2外侧面,紧固螺栓4-3内径大于夹接件4-2最小外径,紧固螺栓4-3内径小于夹接件4-2最大外径。
进一步地,所述显微镜7为数码显微镜7,显微镜7与控制器17导线连接;所述stm探针针尖制备装置还包括无线通信模块16,所述无线通信模块16与控制器17导线连接。
进一步地,还包括:储液瓶8,所述储液瓶8固定安装在底座2上表面,所述储液瓶8上表面设有通气孔8-1;第一管道9,所述第一管道9的下端与储液瓶8内的瓶底连通;蠕动泵10,所述蠕动泵10的进液口与第一管道9上端连通,蠕动泵10与控制器17电连接;补液管11,所述补液管11为硬质管道,补液管11上端与蠕动泵10的出口连通,补液管11下端开口竖直向下并焊接连接金属圈3,金属圈3位于补液管11下端开口的正下方。
进一步地,还包括:电动伸缩杆12,所述电动伸缩杆12下端焊接连接在底座2上,电动伸缩杆12位于金属圈3正下方,电动伸缩杆12的伸缩方向与竖直方向平行,所述电动伸缩杆12与控制器17导线连接;吸水海绵14,所述吸水海绵14粘接连接在电动伸缩杆12上端。
进一步地,还包括:积水柱3-1,所述积水柱3-1焊接连接在金属圈3最下部,积水柱3-1表面涂有亲水材料。
进一步地,还包括:加热垫片13,所述加热垫片13设置在电动伸缩杆12上端与吸水海绵14之间,加热垫片13与控制器17导线连接。加热垫片13可采用pi加热片。
进一步地,还包括:直线位移传感器15,所述直线位移传感器15下端焊接连接在底座2上,直线位移传感器15上端焊接连接电动伸缩杆12上端,直线位移传感器15与电动伸缩杆12平行,直线位移传感器15与控制器17导线连接。
本实用新型的优点是:
1)本实用新型通过步进电机6-1转动带动丝杆6-2在收缩机构本体6-4上的螺纹孔6-4-1内旋转,使得丝杆6-2左右移动,将丝杆6-2转动转化为左右方向的运动,控制精度更高,并且左右运动的速度较低,满足探针针尖制作时对控制精度和低速的要求;另外本实用新型中使用时由于丝杆6-2右端通过正多边形杆6-3插入步进电机6-1转轴上的正多边形孔6-1-1中,使得步进电机6-1转动能够带动丝杆6-2转动的同时丝杆6-2左右移动不会影响步进电机6-1;
2)本实用新型通过控制按钮18向控制器17发送不同的信号,例如按压次数或时长,控制器17通过不同的信号识别控制按钮18指令,控制器17根据识别的指令控制步进电机6-1正转反转,替代人手微调显微镜的左右调节旋钮,控制更加精度和可重复性更高;
3)本使用新型通过将探针夹持座4上的导孔4-4滑动连接在导杆6-4-2上,使得探针夹持座4相对于中心不会转动,避免了探针转动导致对针尖的电化学腐蚀精度降低;
4)本实用新型通过将永磁体6-5固定连接在丝杆6-2右端,使探针夹持座4为铁磁性材料,探针夹持座4与永磁体6-5磁吸连接,相比传统方式丝杆6-2与夹持座转动连接,使得丝杆6-2与探针夹持座4间的连接结构更加简单,就算有磨损,由于磁吸作用,探针夹持座4随时都是紧贴丝杆6-2的,不会产生丝杆6-2移动探针夹持座4会延迟一段时间才被带动移动的现象,控制探针左右往复微距运动的精度得到提高,并且抗磨损能力更强;
5)本实用新型将探针夹持座4的夹接件4-2设计为圆台形,并且夹接件4-2表面开有螺纹,夹接件4-2侧部开设内外壁贯通的缝隙4-2-2,使用紧固螺栓4-3螺纹连接在夹接件4-2外表面,由于紧固螺栓4-3内径大于夹接件4-2最小外径,紧固螺栓4-3内径小于夹接件4-2最大外径,当紧固螺栓4-3旋转靠近右侧时夹接件4-2内径减小将探针夹紧,当紧固螺栓4-3旋转靠近左侧时夹接件4-2内径增大将探针松开。
以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。