1.本公开涉及判定识别体是否是对象体的对象体判定方法、对象体判定装置。
背景技术:
2.在专利文献1中记载了如下的中心位置取得方法:关于由拍摄装置拍摄到的拍摄图像中包含的识别图像,取得位于识别图像的内部的包含假定的中心点的第一区域的多个点的辉度的平均值和位于第一区域的周边的第二区域的多个点的辉度的平均值,在第一区域的辉度的平均值比第一阈值高且第二区域的辉度的平均值为比第一阈值小的第二阈值以下的情况下,将假定的中心点设为真的中心点。另外,第一阈值、第二阈值是固定值,预先取得并存储。
3.现有技术文献
4.专利文献1:日本特开2007
‑
273519号公报
技术实现要素:
5.公开所要解决的课题
6.本公开的课题在于使得能够判定拍摄图像中包含的识别图像是否是与对象体对应的对象图像。
7.用于解决课题的手段及效果
8.在本对象体判定方法中,基于位于拍摄图像中包含的识别图像的内部的至少一个点的辉度与该识别图像的边缘的辉度的比较结果来判定识别图像是否是与对象体对应的对象图像。例如,在对象体比电路基板亮的情况下,位于对象图像的内部的至少一个点比该对象图像的边缘的辉度亮。相对于此,在位于识别图像的内部的至少一个点比该识别图像的边缘的辉度暗的情况下,判定为识别图像不是对象图像,在位于识别图像的内部的至少一个点比边缘的辉度亮的情况下,判定为是对象图像。
9.识别图像的内部能够设为由规定识别图像的外形线即边缘包围的部分。关于对象图像也相同。另外,识别图像有时是虚像,但在该情况下,与识别图像对应的识别体不实际存在,判定为识别图像不是对象图像。此外,识别体、对象体能够设为形成于电路基板的图案或者设为安装于电路基板的元件等。另外,对象体能够设为形成于电路基板的基准标记或者设为向电路基板安装的适当的元件。适当的元件是预先决定了向电路基板的该位置安装的元件即适当件,但也存在将是适当件且以正确的状态安装的孕检称作对象体的情况。正确的状态例如不是背面位于上表面的状态,而是表面位于上表面的状态。
附图说明
10.图1示出连接有本公开的实施例1的对象体判定装置的安装机。
11.图2是示出上述安装机的侧视图。
12.图3是将上述安装机的主要部分放大地示出的侧视图(局部截面)。
13.图4是示出上述安装机的落射照明装置的侧视图。
14.图5是概念性地示出控制上述安装机的控制装置、对象体判定装置的周边的图。
15.图6中的(6a)是示出上述电路基板的俯视图。(6b)是上述电路基板的区域r的图像a。
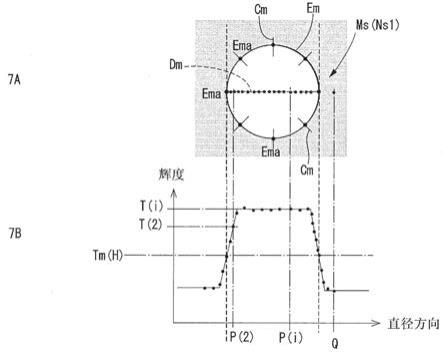
16.图7中的(7a)是上述图像a中包含的标记图像。(7b)是示出上述标记图像的内部的辉度分布的图。
17.图8中的(8a)是上述图像a中包含的识别图像的俯视图。(8b)是示出上述识别图像的内部的辉度分布的图。
18.图9是示出上述标记图像的辉度分布的另一例的图。
19.图10是示出上述识别图像的辉度分布的另一例的图。
20.图11是表示存储于上述对象体判定装置的存储部的标记图像判定程序的流程图。
21.图12是表示存储于上述对象体判定装置的存储部的另一标记图像判定程序的流程图。
22.图13是概念性地示出特定点的分布的图。
23.图14是表示存储于上述对象体判定装置的存储部的又一标记图像判定程序的流程图。
24.图15中的(15a~15c)是示出由本公开的实施例2的对象体判定装置判定的识别图像的图。
25.图16是表示存储于上述对象体判定装置的存储部的对象图像判定程序的流程图。
26.图17是概念性地示出本公开的实施例3的对象体判定装置的周边的图。
具体实施方式
27.基于附图来详细说明作为本公开的一实施方式的对象体判定装置和连接有对象体判定装置的安装机。在对象体判定装置中,实施作为本公开的一实施方式的对象体判定方法。
28.实施例1
29.在图1中,附图标记12表示作为安装机10的主体的基体。在基体12上设置有将电路基板(以下,简称作基板)14沿着x方向输送的基板输送装置16、保持基板14的基板保持装置18、向基板14安装电子电路元件20(参照图3。以下,简称作元件20)的元件安装装置22及向元件安装装置22供给元件20的元件供给装置24等。在基板14上设置有基准标记m。另外,将基板14的宽度方向设为y方向,将上下方向设为z方向。x方向、y方向、z方向相互正交。
30.元件供给装置24例如能够设为包含多个带式供料器30。
31.元件安装装置22利用图3所示的元件保持头40来输送元件20,并向基板14的上表面安装。如图1所示,元件安装装置22包含使元件保持头40向与xy坐标面平行的平面即水平面内的任意的位置移动的头移动装置41,头移动装置41包含x滑动件42、x滑动件移动装置44(参照图1)、y滑动件46及y滑动件移动装置48等。x滑动件移动装置44使x滑动件42沿着x方向移动。y滑动件46设置于x滑动件42,y滑动件移动装置48使y滑动件46在x滑动件42中沿着y方向相对移动。
32.在y滑动件46以能够一体地移动的方式安装有元件保持头40、基准标记相机54(参
照图1)、环状照明装置56(参照图4)、落射照明装置58。
33.元件保持头40包含例如吸嘴50。在吸嘴50中,通过负压吸附元件20,通过负压的开放而向基板14安装。
34.基准标记相机54是拍摄形成于基板14的基准标记m等的拍摄装置,在本实施例中,由ccd相机构成。
35.如图4所示,环状照明装置56向基准标记相机54的周围照射光,对基板14的基准标记m及其周边的部分进行照明。
36.落射照明装置58包括半反射镜60、具备卤素灯62的光源64等。半反射镜60以相对于基准标记相机54的光轴倾斜45度的方式设置于基准标记相机54的下方。从光源64向半反射镜60沿着水平方向照射光,光被垂直地向下方反射。附图标记66表示不反光纸。由不反光纸66吸收透过了半反射镜60的光。
37.在上述基准标记相机54拍摄基板14时,选择性地使用环状照明装置56和落射照明装置58中的任一个。
38.本安装机10具备图5所示的安装机控制部80。安装机控制部80以计算机为主体而构成,对未图示的输入输出部经由驱动电路81而连接x滑动件移动装置44、y滑动件移动装置48等,并且连接对象体判定装置82、基准标记相机54等。
39.对象体判定装置82以计算机为主体而构成,包含取得由基准标记相机54拍摄到的拍摄图像中包含的多个点的辉度的辉度取得部92和分别判定拍摄图像中包含的一个以上的识别图像中的至少一个是否是对象图像的对象图像判定部94。对对象体判定装置82的未图示的输入输出部连接基准标记相机54、输入装置84、显示器86等。
40.在如以上这样构成的安装机10中,进行元件20向基板14的安装作业。基板14由基板输送装置16输送至预先确定的作业位置,由基板保持装置18定位保持。基准标记相机54被定位于预先确定的基准标记拍摄位置,拍摄设置于基板14的基准标记m等。通过拍摄图像的图像处理,取得基准标记m的位置,并取得基板14的位置误差。然后,元件保持头40从供料器30接收元件20,向基板14上的预先确定的位置即基于位置误差而修正后的位置移动,并安装元件20。
41.在对象体判定装置82中进行通过基准标记相机54的拍摄而得到的拍摄图像的图像处理。
42.如图6a所示,通过基准标记相机54拍摄基板14的包含基准标记m的设定区域r,由此,如图6b所示,取得拍摄图像a。但是,由于在基板14上例如形成有基准标记m、引线插入部b、配线等识别体,所以在拍摄图像a中包含多个能够识别的图像即识别图像ns1、ns2、ns3
…
等。以下,在无需互相区分多个识别图像ns1、ns2、ns3
…
等的情况下、对它们进行统称的情况下,有时简称作识别图像ns。
43.于是,在本实施例中,在对象体判定装置82中,通过关于拍摄图像a的图像处理,取得多个识别图像ns,判定这多个识别图像ns中的各识别图像ns分别是对象图像还是标记图像ms。由此,从多个识别图像ns中确定出标记图像ms,取得基准标记m的位置,取得基板14的位置误差。
44.具体而言,关于拍摄图像a中包含的多个识别图像ns中的各识别图像ns,首先取得边缘e,取得识别图像ns的大小(例如,直径的长度)。并且,比较多个识别图像ns各自的直径
的长度和已知的标记图像ms的直径的长度,例如,将它们之差的绝对值比设定值小的识别图像ns设为候补图像。另外,关于识别图像ns中的各识别图像ns取得并存储边缘e的辉度t。
45.接着,关于识别图像ns中的被设为了候补图像的识别图像ns,分别取得位于候补图像的内部的多个点p(i)的辉度t(i),分别与边缘e的辉度t进行比较。基于其比较结果来分别判定作为候补图像的识别图像ns是否是标记图像ms。
46.例如,在基板14的表面呈大致绿色且基准标记m呈大致白色的情况下,与基板14相比,基准标记m更白、亮。如图7a、7b所示,位于作为识别图像之一的标记图像ms的内部的多个点p(i)i=1,2,
…
的辉度比表示基板14的图像上的点q的辉度大。换言之,位于标记图像ms的内部的多个点p(i)各自的辉度t(i)比标记图像ms与表示基板14的图像的交界即边缘em的辉度tm大。
47.边缘em的辉度tm基于在标记图像ms中与边缘大致正交地设置的多个查找线cm上的各自的辉度的变化梯度最大的点即多个边缘点ema的辉度tma而决定。例如,能够将对多个边缘点ema各自的辉度tma以统计的方式进行处理后的值(例如,平均值)设为边缘em的辉度tm。拍摄图像a上的点的辉度由辉度取得部92取得。
48.另外,位于标记图像ms的内部的多个点p(i)优选大致沿着标记图像ms的直径dm设置。这是因为,直径dm通过标记图像ms的特征部即中央部。
49.如图6a所示,引线插入部b包含焊盘110和孔(也能够称作通孔)112,但焊盘110比基板14亮,孔112比基板14暗。因此,如图8a、8b所示,表示引线插入部b的识别图像即插入部图像bs的内部的多个点中的位于中央部(包含插入部图像bs的中心点的部分)的点p(i1)的辉度比插入部图像bs的边缘eb的辉度tb小,但位于中央部的周边的周边部的点p(i2)的辉度比边缘eb的辉度tb大。边缘eb的辉度tb基于根据沿着设置于插入部图像bs的多个查找线cb的辉度的变化而取得的多个边缘点eba的辉度tba而相同地取得。
50.但是,如图9所示,能够设为:即使在位于识别图像ns的内部的点p(i)中存在辉度t(i)比边缘e的辉度t(=阈值h)小的点,在该点的数量少的情况下,例如,在辉度t(i)比阈值h低的点即低辉度点的数量相对于整体的点p(i)的数量的比率γ为设定比率γth以下的情况下,也判定为识别图像ns是标记图像ms。例如,可认为只不过在基准标记m的内部因出现了损伤或者附着有异物而存在低辉度点。
51.与此相对,如图10所示,在位于识别图像ns的内部的低辉度点的比率γ比设定比率γth高的情况下,判定为识别体ns具有孔的可能性高,判定为识别图像ns不是标记图像ms。
52.如以上这样,在本实施例中,关于作为候补图像的识别图像ns各自的内部的位于大致沿着直径的位置的多个点p(i)各自的辉度t(i)由辉度取得部92取得,比较各辉度t(i)和识别图像ns的边缘e的辉度t,基于其比较结果来判定识别图像ns是否是标记图像ms。具体而言,在各识别图像ns中,分别将边缘e的辉度t设为阈值,在辉度t(i)为阈值以下的点p(i)的个数相对于内部的多个点p(i)的个数的比率为设定比率以下的情况下,判定为识别图像ns是标记图像ms。
53.通过执行由图11的流程图表示的标记图像判定程序来判定识别图像ns各自是否是标记图像ms。
54.在步骤1(以下,简称作s1。关于其他步骤也设为相同)中,关于各识别图像ns,大致
沿着直径设定多个点p(i),取得多个点p(i)各自的辉度t(i)。在s2中,读入识别图像ns的边缘e的辉度t,在s3中,将边缘e的辉度t设为阈值h。
55.在s4中,分别判定位于识别图像ns的内部的多个点p(i)的辉度t(i)各自是否比阈值h大。在s5、6中对例如辉度t(i)比阈值h大的点即高辉度点p的数量ca、辉度t(i)为阈值h以下的点即低辉度点p的数量cb分别进行计数。在s7中,判定是否关于多个点p(i)全部完成了与阈值h的比较。在判定结果为否的情况下,反复执行s4~7。在判定结果变成是的情况下,在s8中,取得低辉度点的数量cb相对于整体的点的数量c(=ca cb)的比率γ(=cb/c),在s9中,判定比率γ是否比设定比率γth大。
56.在s9的判定为是的情况下,在s10中判定为识别图像ns不是标记图像ms,在判定结果为否的情况下,在s11中判定为识别图像ns是标记图像ms。
57.例如,在识别图像ns1、ns2被设为了候补图像的情况下,在识别图像ns1中,如图7a、7b所示,大致沿着直径dm设定的多个点p(i)各自的辉度t(i)比边缘em的辉度tm大。因此,低辉度点的数量相对于整体的点的数量的比率γ成为设定比率γth以下,判定为识别图像ns1是标记图像ms。
58.与此相对,在识别图像ns2中,如图8a、8b所示,大致沿着直径db设定多个点p(i),分别取得辉度t(i),但位于中央部的多个点p(i1)的辉度比边缘eb的辉度tb小。因此,低辉度点的数量相对于整体的点的数量的比率γ比设定比率γth大,判定为识别图像ns2不是标记图像ms。
59.另外,根据标记图像ms和识别图像ns2明显可知,多个点p(i)中的位于中央部的点p(i)的辉度与边缘e的辉度t的比较结果在标记图像ms和识别图像ns2中不同。因此,将标记图像ms的中央部设为特征部。也能够认为该特征部是插入部图像bs的特征部。
60.这样,将低辉度点设为特定点,基于特定点的数量相对于整体的点的数量的比率来判定识别图像ns是否是标记图像ms。因此,虽然大小大致相同,但能够使得不容易将与具有孔112的引线插入部b对应的插入部图像bs(ns2)误判定为标记图像ms,能够从多个识别图像ns中良好地确定出标记图像ms。
61.另外,识别图像ns中包含的多个点p(i)的辉度经常根据照明的状况而改变,边缘e的辉度t未必始终恒定。对此,在识别图像ns各自中取得边缘e的辉度t并取得候补图像后,作为候补图像的识别图像ns的内部的多个点p(i)的辉度t(i)与边缘e的辉度t即阈值h比较。因此,与将阈值h设为固定值的情况相比,能够准确地取得位于识别图像ns的内部的多个点p(i)的辉度t(i)是否比边缘e的辉度t大。
62.另外,能够通过执行由图12的流程图表示的标记图像判定程序的来判定识别图像ns是否是标记图像ms。在本实施例中,基于识别图像ns的辉度为阈值h以下的点的位置来判定是否是标记图像ms。在由图12的流程图表示的程序中,对于进行与由图11的流程图表示的程序相同的执行的步骤,标注相同的步骤编号而省略说明。
63.在本程序中,在s4中,判定位于识别图像ns的内部的多个点p(i)各自的辉度t(i)分别是否比阈值h大,基于s4的判定结果,在s21、22中,分别存储高辉度点p(jh)和低辉度点p(jd)。并且,在s24中,取得低辉度点p(jd)的分布,在s25中,判定低辉度点p(jd)是否位于识别图像ns的中央部(包含中心点o的部分)。在判定结果为是的情况下,在s26中,判定为识别图像ns不是标记图像ms,在判定结果为否的情况下,在s27中,判定为识别图像ns是标记
图像ms。
64.例如,在识别图像ns1中,不存在低辉度点p(id)。与此相对,在识别图像ns2中,如图13所示,低辉度点p(id)集中于识别图像ns2的中央部。因此,判定为识别图像ns1是标记图像ms,判定为识别图像ns2不是标记图像ms。
65.这样,在本实施例中,将低辉度点p(id)设为特定点,基于特定点的分布来判定识别图像ns是否是标记图像ms。因此,能够良好地判定识别图像ns是否表示具有孔112的识别体b,能够使得不容易将插入部图像bs误判定为标记图像ms。
66.另外,也能够将高辉度点p(ih)设为特定点,取得高辉度点p(ih)的分布。在该情况下,能够设为在高辉度点p(ih)既存在于中央部也存在于周边部的情况下,判定为识别图像是标记图像ms,在位于中央部的高辉度点p(ih)非常少的情况下,判定为识别图像不是标记图像ms。
67.如以上这样,在本实施例中,由对象体判定装置82中的对由图11的流程图表示的标记图像判定程序(或者,由图12的流程图表示的标记图像判定程序)进行存储的部分、进行执行的部分等构成对象图像判定部94。另外,由图11的流程图表示的标记图像判定程序(或者,由图12的流程图表示的标记图像判定程序)中的s1对应于辉度取得工序,s4、s6(或者s4、s22)对应于特定点取得工序。而且,由图11的流程图表示的标记图像判定程序中的s8对应于比率取得工序,s9
‑
11对应于第一判定工序,由图12的流程图表示的标记图像判定程序中的s24对应于分布取得工序,s25
‑
27对应于第二判定工序。另外,在本实施例中,将基准标记m设为对象体。
68.另外,将位于识别图像ns的内部的多个点p(i)各自的辉度t(i)与边缘e的辉度t进行比较不是不可或缺的,能够取得如图7b、图8b所示的辉度分布,判定辉度分布是否与预先确定的图案相同。例如,在辉度分布是与图8b所示的图案(将表示插入部图像中的辉度分布的图案称作插入部图案。以下,设为相同)相同的图案的情况下,能够判定为识别图像ns不是标记图像。将该情况下的一例在图14中示出。在插入部图像bs中,如图8b所示,沿着直径db设置多个点p(i),取得多个点p(i)各自的辉度,但随着从直径db的一端部靠近另一端部,辉度增加后减小,然后,增加后减小。
69.在s31中,取得位于识别图像ns的内部的多个点p(i)各自的辉度t(i),在s32中,取得辉度分布即图案,在s33中,判定得到的图案是否与插入部图案相同。在判定结果为是的情况下,在s34中,判定为识别图像ns不是标记图像ms,在判定结果为否的情况下,在s35中,判定为识别图像ns是标记图像ms。在本实施例中,s32对应于辉度分布取得工序。
70.另外,虽然图示省略,但能够将比基板14的表面暗的部分设为基准标记。基板14的表面的颜色也不限于绿色,也能够设为比其亮的颜色。
71.在本实施例中,位于标记图像的内部的多个点p(i)各自的辉度t(i)比标记图像的边缘e的辉度t小,但能够与上述实施例中的情况相同地,分贝判定拍摄图像中包含的一个以上的识别图像ns中的各识别图像ns是否是标记图像。
72.实施例2
73.在本实施例中,基于位于拍摄图像中包含的表示安装于基板的元件的识别图像的内部的多个点p(i)的辉度t(i)与识别图像的边缘e的辉度t的比较结果来判定安装于基板14的元件是否是适当件(是指本来应该向该位置安装的元件)且以正确的状态安装(是否本
来不是成为上表面的面的面成为了上表面)。
74.例如,将具有比基板14暗的颜色的表面的适当件以正确的状态(表面处于上表面的状态)安装的情况下的识别图像即适当图像ng在图15a中示出。在图15a中,位于适当图像ng的内部的多个点p(i)的辉度t(i)比适当图像ng的边缘eg的辉度tg小。
75.另外,将与适当件不同的其他元件的识别图像即其他元件图像nj在图15b中示出。如图15b所示,位于其他元件图像nj的内部的多个点p(i)的辉度t(i)比其他元件图像nj的边缘ej的辉度tj大。
76.而且,将表示虽然是适当件但以表背相反的状态安装的元件的识别图像即背面状态图像nf在图15c中示出。如图15c所示,在背面状态图像nf中,多个点p(i)中的位于中央部的点p(i2)的辉度比背面状态图像nf的边缘ef的辉度tf大,位于中央部的周边的周边部的点p(i1)的辉度比边缘ef的辉度tf小。
77.在本实施例中,执行由图16的流程图表示的对象图像判定程序。在图16的流程图中,关于进行与图11、12的流程图相同的执行的步骤,标注相同的步骤编号而省略说明。
78.在s4中,对多个点p(i)各自的辉度t(i)分别与阈值h进行比较,在比阈值h大的情况下,在s5、21中,计数高辉度点的个数,并且存储位置。在为阈值h以下的情况下,在s6、22中,计数低辉度点的个数,并且存储位置。在s40中,取得作为特定点的高辉度点的个数ca相对于整体的个数c的比率γ
′
,在s41中,取得高辉度点p(jh)的分布。
79.并且,在s42中,判定比率γ
′
是否比设定比率γth
′
大。在判定为否的情况下,在s43中,判定为识别图像ns是对象图像,与识别图像对应的元件是适当件且以正确的状态安装。即,判定为识别体是对象件。与此相对,在判定为是的情况下,在s44中,判定高辉度点是否集中于中央部。在判定为是的情况下,在s45中,判定为与识别图像对应的元件是适当件但以表背相反的状态安装。在判定为否的情况下,在s46中,判定为与识别图像对应的元件不是适当件。
80.这样,本公开也能够应用于检查安装于基板14的元件是否是适当件且是否以正确的状态安装的检查方法。
81.实施例3
82.在上述实施例1、2中,对识别图像是否是对象图像的判定基于由设置于安装机10的基准标记相机54取得的拍摄图像a来进行的情况进行了说明,但如图17所示,也能够基于由设置于检查机200的检查用相机202取得的拍摄图像来进行。在本实施例中,对检查机200连接对象体判定装置204,对对象体判定装置204连接检查用相机202。在本实施例中,也能够相同地进行识别图像是否是对象图像的判定。
83.以上,虽然说明了本公开的一些实施方式,但它们只不过是例示,本公开能够以基于本领域技术人员的知识而实施各种变更、改良后的方式来实施。
84.附图标记说明
85.10:电子电路元件安装机 54:基准标记相机 56:照明装置 58:落射照明装置 82:对象体判定装置 92:辉度取得部 94:对象图像判定部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。