使用致动效率的间隙控制
技术实现要素:
1.提供了一种方法,该方法当在密封的存储设备中的换能头和相邻存储表面之间保持固定有源间隙时,获得为温度的线性函数的目标致动效率斜率。该目标效率斜率是至少部分地通过对致动效率的温度相关校准获得的。测量该存储设备的操作温度。调整提供给间隙调整机构的功率,以在测量的操作温度上实现目标致动效率斜率。
2.一种控制系统包括被配置为在密封的存储设备中的换能头与相邻存储表面之间保持固定有源间隙的间隙致动机构。温度传感器被配置为测量该密封的存储设备的操作温度。处理电路被配置为调整提供给间隙致动机构的功率,直到实现测量的操作温度上的目标致动效率为止。当在该换能头与相邻存储表面之间保持固定有源间隙时,该目标致动效率斜率是温度的线性函数,并且至少通过对致动效率的温度相关校准获得。
3.提供了一种方法,该方法包括:当在密封的存储设备中的换能头与相邻表面之间保持固定有源间隙时,产生为温度的线性函数的目标致动效率斜率。测量存储设备的操作温度。产生对应于测量的操作温度的测量的致动效率斜率。调整提供给间隙调整机构的功率,以保持该换能头相对于相邻存储表面的有源间隙,直到测量的致动效率斜率匹配目标致动效率斜率为止。
4.此发明内容并非意在描述管理本文所述的数据存储设备中的相邻轨道干扰的每个所公开实施方案或者每种实施方式。随着此描述的进行,很多其他新颖的优点、特征和关系将变得显而易见。随后的附图和描述将更具体地对说明性实施方案进行举例说明。
附图说明
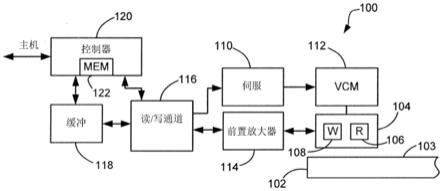
5.图1是可以在其中使用本公开的实施方案的数据存储设备的功能框图。
6.图2示出了图1中所示的头的间隙距离或飞行高度。
7.图3示出了与图1的头相互作用的控制电路。
8.图4示出了表示使用致动效率的间隙控制电路的功能框图。
9.图5示出了一种控制存储设备中的飞行高度(或头间隙)的方法的流程图,该方法使用致动效率消除热衰减和读取器退化的影响。
10.图6示出了示例性存储设备中的用以获得目标hirp斜率的测试过程校准的流程图。
11.图7是如图6中所示的第一热温度上的hirp的校准的图形表示。
12.图8是如图6中所示的获得第一热温度上的局部有源hirp斜率的图形表示。
13.图9是如图6中所示的第二冷温度上的hirp的校准的图形表示。
14.图10是如图6中所示的获得第二冷温度上的局部有源hirp斜率的图形表示。
15.图11示出了示例性存储设备中的用以获得目标hirp斜率的测试过程校准的流程图。
16.图12是目标hirp斜率的图形表示。
17.图13是比较经历致动效率间隙控制与经历绝对幅值间隙控制的存储设备的图形
表示。
18.图14是比较经历致动效率间隙控制与经历绝对幅值间隙控制的存储设备的误码率(ber)的图形表示。
19.图15示出了在显示使用致动效率hirp斜率的fafh的左侧图表与显示基于绝对幅值的fafh的右侧图表之间处于冷温度、环境温度和热温度下的温度电压幅值(tvm)的图形表示。
20.图16示出了使用基于绝对幅值的fafh的存储设备中的间隙对比头寿命的图形表示。
21.图17示出了使用基于致动效率的fafh的存储设备中的间隙对比头寿命的图形表示。
具体实施方式
22.控制系统使对象相对于另一对象移动并且保持在目标位置上。例如,硬盘驱动器(hdd)使用伺服控制系统将读/写换能器定位成与存储介质上的轨道相邻,并且使用飞行高度控制系统控制与存储介质的对应表面相邻的读/写换能器的间隙距离或飞行高度。
23.一种示例性飞行高度控制系统是现场调整飞行高度(fafh)。当前的fafh依赖于读换能器或传感器的读回幅值,以检测并校正驱动器操作期间发生的间隙变化。当前的fafh使用两个不同频率上的绝对幅值测量结果并且取它们的比率。此比率抵消掉任何频率无关增益变化,并且因此当前的fafh的精确度受到使高频幅值发生与低频幅值不同量的变化的任何因素的影响。这些增益变化可能被误解为间隙变化。具体而言,当前fafh不准确性的两个主要来源是由于两种不同的频率相关幅值变化:热衰减和读取器退化(例如,氧化)。
24.对于热衰减而言,低频幅值比高频幅值衰减得更快,并且绝对幅值fafh将这种变化不正确地视为间隙减小或下降,并且做出不正确的调整。对于读取器劣化而言,高频幅值倾向于优先受到影响,这被绝对幅值fafh不正确地认为是间隙增大,并且做出不正确的调整。在飞行高度调整得太近时,换能器可能不利地接触存储介质的表面,从而造成读取错误以及对介质的损害。在飞行高度调整得太远时,换能器可能产生读取错误。在任一种情况下,都损害读取系统的可靠性。
25.本文描述了一种间隙控制系统的各种实施方案,该间隙控制系统使用致动效率而非绝对幅值来保持换能器相对于存储介质的存储表面的目标接近点间隙。通过将无源幅值与有源幅值进行比较来测量致动效率。这两个测量结果是连续(在几乎相同的时间)测量的,从而使读取器在一个测量状态(无源或有源)期间与在另一个测量状态期间处于不同状态的概率接近零。因此,致动效率测量几乎不受热衰减和读取器氧化/劣化的影响。
26.图1是可以在其中使用本公开的实施方案的数据存储设备100的功能框图。存储设备100检索来自主机设备(未单独示出)并且存储在一个或多个可旋转数据记录介质(例如,一个或多个盘)102上的数据,尽管这只是示例性的,而非限制性的。其他类型的存储介质也是可能的。通过在设备操作期间被支撑在旋转介质102附近的读/写换能器(换能头)104访问介质102上的数据。换能头104包括一个或多个读元件(r)106和一个或多个写元件(w)108。读元件(r)106和写元件(w)分别从数据记录介质102的记录表面103读取数据以及向其写入数据。伺服控制电路110向音圈马达(vcm)112提供电流,以将相应的读元件(r)106和写
元件(w)108定位成与介质102上定义的数据轨道相邻。
27.换能头104被配置为使用通过介质102的高速旋转建立的流体(例如,空气)流支撑在介质102的记录或存储表面103附近。这使得头104按照标称稳定的非接触关系保持在选定的接近间隙距离(飞行高度)101处,如图2中所表示的。
28.前置放大器/驱动器电路(preamp)114在数据读取操作期间对来自读元件(r)106的读取信号应用信号预调节和预放大,并在数据写入操作期间向写元件(w)108供应写电流。前置放大器114的很多其他功能包括头选择、飞行高度调整、接近度感测等。读/写(r/w)通道116提供数据编码/解码,缓冲存储器118在数据传输操作期间提供对数据的暂时存储,并且控制器120提供对存储设备100的顶级控制。控制器120可以构成使用本地控制器存储器122中的编程步骤和控制参数的可编程处理器。控制器功能可以替代性地通过硬件实现,并且/或者被并入到图1中所示的其他操作块中。
29.图3示出了与换能头104一起相互作用的前置放大器114的控制电路。换能头104包括前述的读元件(r)106、前述的写元件(w)108和间隙调整机构124,例如,加热器(h)。然而,其他头配置也是可能的,包括具有多个加热器、多个接近传感器等的头配置。在一些实施方案中,读元件(或传感器)(r)106可以是磁阻式(mr)磁传感器,写元件(w)108可以是电感线圈,例如,垂直磁记录换能器。此外,写元件(w)108可以包括热辅助磁记录(hamr)部件,诸如光源、近场换能器(nft)等。
30.如所提及的,加热器(h)124是一种类型的间隙调整机构,其调整读元件106与存储介质102(图1和图2)之间的间隙距离或飞行高度101(图2)。加热器124可以包括电阻材料,其响应于头104的热膨胀引起飞行高度的变化。
31.前置放大器114包括前置放大器级128、写驱动器130和电力驱动器132。前置放大器级128对在读取操作期间从读元件(r)106获得的读回信号应用预放大和其他信号调节,并且转发预调节信号,以供读/写通道116处理。写驱动器128响应于读/写通道116供应的串行化写入数据向写元件(w)108提供时变的双向脉宽调制(pwm)写电流。电力驱动器132响应于输入的加热器值向加热器124供应电压和/或电流。输入的加热器值越大,由加热器124生成的热的量越大,头104的飞行高度越低。输入的加热器值可以由控制器120(图1)供应。在一些情况下,将多位数字值作为加热器数模(dac)信号供应,其中驱动器132响应于输入的加热器dac信号的幅值提供输出模拟功率电平。
32.在密封的数据存储设备中,温度和压力以确定性方式一起变化。作为气密密封和使用干燥剂的结果,密封的存储设备中的湿度变化是最小的。在这些条件下,加热器124通过加热器引发的读取器突伸(hirp)向换能头104提供致动效率,hirp是数据存储设备的温度和换能头104的有源间隙两者的线性函数。换言之,hirp是温度相关的。此外,hirp是无源和有源读取器幅值的相对测量结果,其不依赖于绝对幅值参考。照此并且如前所述,致动效率或hirp不受热衰减和读取器劣化的影响。
33.图4示出了数据存储设备100的处理电路130。处理电路130可以体现在图1中表示的功能框中的一者或多者中。如将解释的,处理电路130操作以检测设备100的操作温度,并且调整换能头或换能器104的现有间隙距离(飞行高度),从而保持换能头104相对于存储介质102的存储表面103的有源间隙,直到实现目标致动效率斜率或者目标hirp斜率为止。
34.处理电路130使用在设备制造期间获得并且存储在目标hirp斜率模块134中的校
准数据,而后在后续现场使用期间的适当时间进行操作。电路130包括分析引擎132、目标hirp斜率模块134,接收来自温度传感器136的设备温度读数,并且将功率要求传达给间隙调整机构124,例如,作为换能头104的一部分的加热器124。
35.图5示出了由处理电路130施行的并且消除热衰减和读取器劣化的影响的控制数据存储设备中的飞行高度(或头间隙)的方法500的流程图。为了在所描述的间隙控制系统中使用致动效率或hirp,在框502处,获得或产生目标hirp(致动效率)斜率,并将其用作主要间隙控制系统输入。使用目标hirp斜率模块134和分析引擎132计算、确定并存储目标hirp斜率。当在换能头(例如,换能头104)与相邻存储表面(例如,密封的存储介质102的存储表面103)之间保持固定间隙时,目标致动效率斜率是温度的线性函数。
36.为了获得或产生目标hirp斜率,图6和图11示出了由处理电路130对示例性封装的存储设备(例如,封装的存储设备100)使用的测试过程校准600的流程图。一般而言,至少部分地通过在设备制造期间完成两温度或温度相关校准测试来获得或产生目标hirp斜率。在第一热存储设备温度上完成该测试以获得第一热存储设备温度上的局部有源hirp斜率,并且在第二冷存储设备温度上完成该测试,以获得第二冷存储设备温度上的局部有源hirp斜率。换言之,该测试过程校准的第一部分包括执行热校准,该测试过程校准的第二部分包括执行冷校准,并且第一热温度高于第二冷温度。
37.在框602处,将存储设备设置为第一热温度。在框604处,从关闭加热器的无源加热器状态到增加的有源输入加热器dac的量来测量hirp,直到头近乎接触存储表面为止。随着输入加热器dac的增大,hirp的测量结果增大。在没有输入加热器dac的情况下的零hirp与输入加热器dac在第一热存储设备温度下将头或读取器放置成近乎接触到存储表面上时的差被称为热无源间隙603。图7中示出了在框604中测量的数据点,该图为在存储设备的第一热温度上hirp对比加热器dac的图形表示700。在框606处,对测量的热hirp对比加热器dac数据执行不受约束的二阶多项式回归。该多项式采取的形式为:
38.a
h
d2 b
h
d c
h
=h
h
ꢀꢀ
(方程1)
39.其中,下标h表示用于第一热温度上的热校准的值,d是加热器dac,并且h
h
是用于第一热温度上的热校准的hirp。
40.将不受约束的二阶多项式拟合至由图7中的曲线702所示的测量的hirp对比热加热器dac数据点。在框608处并且在执行不受约束的二阶多项式回归之后,对该不受约束的回归外推,以获得热接触加热器dac 710处或者换能头近乎与相邻存储表面接触的位置处的hirp 708。在框610处,使用针对目标706的已知afh加热器dac,外推出针对目标706的已知afh加热器dac上的hirp 709,并且从hirp 708减去hirp 709,以确定目标间隙704。
41.在框612处,对测量的热hirp对比加热器dac数据执行受约束的回归。在框614处,使用受约束的回归系数计算针对目标706的afh加热器dac上的非伽马化(ungammatized)有源hirp斜率。可以相对于加热器dac对上述方程(即方程1)求微分,从而使用以下系数和方程获得热校准温度上的局部有源hirp斜率:
[0042][0043]
其中,h
′
h
是热温度校准期间取得的目标间隙上的有源hirp斜率,是先前计算的平均二阶hirp曲率,是热温度校准时针对目标间隙的加热器dac,并且b
h
是来自针对热
温度校准时的hirp对比加热器dac的受约束的回归的一阶hirp斜率。
[0044]
图8示出了计算针对目标间隙706的afh加热器dac上的局部有源hirp斜率812(其为所需有源间隙上的局部有源hirp斜率812)的图形表示800。
[0045]
框614结束热校准并且框616开始冷校准。在框616处,将存储设备设置到第二冷温度。在框618处,从关闭加热器的无源加热器状态到增加的有源输入加热器dac的量来测量hirp,直到头近乎接触存储表面为止。随着输入加热器dac的增大,hirp的测量结果增大。在没有输入加热器dac的情况下的零hirp与输入加热器dac在第二冷存储设备温度下将头或读取器放置成近乎接触到存储表面上时的差被称为冷无源间隙903。图9中示出了框618中的测量的数据点,该图为存储设备的第二冷温度上的hirp对比加热器dac的图形表示900。在框620处,对冷hirp对比加热器dac数据执行不受约束的二阶多项式回归。该多项式采取的形式为:
[0046]
a
c
d2 b
c
d c
c
=h
c
ꢀꢀ
(方程3)
[0047]
其中,下标c表示用于第二冷温度上的冷校准的值,d是加热器dac,并且h
c
是用于第二冷温度上的冷校准的hirp。
[0048]
将不受约束的二阶多项式拟合至由图9中的曲线902所示的测量的hirp对比冷加热器dac数据点。在框622处并且在执行不受约束的二阶多项式回归之后,对该不受约束的回归外推,以获得冷接触加热器dac 910处的hirp 908。其被称为冷无源间隙903。在框624处,从冷无源间隙903中减去先前在热校准期间确定的目标间隙704,以获得hirp 909。在hirp 909上对该不受约束的回归进行外推,从而确定冷加热器dac,以实现fafh目标间隙906。
[0049]
在框626处,对测量的冷hirp对比加热器dac数据执行受约束的回归。在框628处,使用受约束回归系数计算针对fafh目标间隙906的冷加热器dac上的非伽马化有源hirp斜率。可以相对于加热器dac对上述方程(即方程3)求微分,从而使用以下系数和方程获得冷校准温度上的局部有源hirp斜率:
[0050][0051]
其中,h
′
c
是冷温度校准期间取得的目标间隙上的有源hirp斜率,是先前计算的平均二阶hirp曲率,是冷温度校准时针对目标间隙的加热器dac,并且b
c
是来自针对冷温度校准时的hirp对比加热器dac的受约束的回归的一阶hirp斜率。
[0052]
图10示出了计算用以实现目标间隙906的冷加热器dac上的局部有源hirp斜率1012(其为所需有源间隙上的局部有源hirp斜率1012)的图形表示1000。
[0053]
一旦在两个存储设备温度上执行了热校准和冷校准,就执行hirp斜率温度灵敏度校准,以产生为温度的函数的目标有源hirp斜率,并且如图11中所示。在图11中的框630处,通过首先计算可以由头/直径存储的hirp斜率温度灵敏度完成hirp斜率温度灵敏度校准。此计算是使用以下方程执行的:
[0054][0055]
其中,hsts是hirp斜率温度灵敏度,h
′
h
是热温度校准期间取得的目标间隙上的有源hirp斜率,h
′
c
是冷温度校准期间取得的目标间隙上的有源hirp斜率,t
h
是热温度校准时
存储设备的温度,并且t
c
是冷温度校准时存储设备的温度。
[0056]
在框632处,作为操作温度的函数计算目标hirp斜率。此计算是使用以下方程执行的:
[0057]
h
′
t
=h
′
h
(t-t
h
)
·
hsts
ꢀꢀ
(方程6)
[0058]
其中,h
′
t
是目标hirp斜率,h
′
h
是热温度校准期间取得的目标间隙上的有源hirp斜率,t是操作温度,t
h
是热温度校准时存储设备的温度,并且hsts是hirp斜率温度灵敏度。之后将目标hirp斜率保存到存储器内,例如,目标hirp斜率模块134的存储器。
[0059]
图12示出了目标hirp斜率的图形表示1200。如图所示,使用致动效率而非绝对幅值的间隙控制系统的所描述实施方案包括求出针对(hs
t
)作为温度的函数的)hirp斜率的加热器dac(参见图11)而非针对目标间隙的加热器dac。
[0060]
返回参考图5,当在框502中针对特定存储设备使用上述校准产生目标致动效率或hirp斜率之后,方法进行至框504,以测量存储设备的操作温度。在框506中,调整提供给间隙调整机构(例如,换能头104中的加热器124)的功率,以保持换能头相对于相邻存储表面(例如,存储介质102的存储表面103)的有源间隙,直到实现目标致动效率或hirp斜率为止。
[0061]
在其他实施方案中,在产生目标hirp斜率或致动效率并且测量存储设备的操作温度之后,可以产生测量的致动效率或hirp斜率,其对应于给定目标有源间隙上的测量的温度。使用上面的方程6计算测量的hirp斜率。在此实施方案中,调整提供给加热器的功率,直到测量的致动效率或hirp斜率与目标致动效率或hirp斜率匹配为止。在所有实施方案中,保持恒定有源接近点间隙仍保持该目标,但是飞行高度调整是基于hirp斜率的变化而非绝对幅值测量结果做出的。
[0062]
图13示出了被设置为75℃持续1000小时的75个存储设备的图形表示1300。左侧图表示出了采取使用致动效率来调整加热器dac的fafh的所描述实施方案的存储设备,该fafh以致动效率或hirp斜率为基础,与之对照的右侧图表则采取了以绝对幅值为基础的fafh,从而基于目标间隙调整加热器dac。y轴示出了以埃为单位的间隙,x轴示出了测试小时数。理想或目标是获得尽可能多的平滑线。这里,右侧图表中的平滑线的下垂表明使用绝对幅值执行fafh导致了对热衰减的误解以及处于错误状态的fafh撤回。
[0063]
图14示出了说明使用致动效率或hirp斜率的左侧图表与说明基于绝对幅值的fafh的右侧图表之间的误码率(ber)的图形表示1400。如图所示,就基于致动效率或hirp斜率的控制系统而言,ber均值和分布明显更优。
[0064]
图15示出了在说明使用致动效率或hirp斜率的左侧图表与说明基于绝对幅值的fafh的右侧图表之间处于三种不同温度(冷、环境和热)的温度电压幅值(tvm)的图形表示1500。例如,冷温度可以处于5℃上,环境温度为室温,并且热温度可以处于65℃上。目标或理想是使每个调整分布的标准偏差尽可能接近0。如图所示,基于致动效率的fafh和基于绝对幅值的fafh在冷温度上近乎相同。然而,在热温度上,基于致动效率的fafh则胜过基于绝对幅值的fafh。
[0065]
图16示出了使用基于绝对幅值的fafh的存储设备中的间隙对比头寿命的图形表示1600。上图表示出了执行基于绝对幅值的fafh的正常头,下图表示出了执行基于绝对幅值的fafh的劣化头。在图16中,下图表示出了具有如由fafh头劣化量度描绘的快速读取器氧化(下方图表线)的迹象的头。上方线中所示的另一数据是输出的fafh dac。在读取器劣
化时,绝对幅值优先丢失。基于绝对幅值的fafh将其误解为飞行高度增加,并且作为证据通过fafh有源热量的迅速提高而推向存储表面。
[0066]
图17示出了使用基于致动效率的fafh的存储设备中的间隙对比头寿命的图形表示1700。上图表示出了执行基于致动效率的fafh的稳定读取器劣化(比如氧化),并且下图表示出了执行基于致动效率的fafh的正常头。随着fafh读取器劣化量度如在逐渐劣化的头中从下方图表线移动到上方图表线的图表线所示而逐渐增大,表示fafh有源热量的另一图表线保持稳定。
[0067]
应当将上文公开的主题视为例示性的,而非限制性的,并且所附权利要求意在涵盖落在本公开的实际范围内的所有此类修改、增强和其他实施方案。因而,在法律允许的最大程度上,本公开的范围由所附权利要求及其等价方案的最宽允许解释决定,而不应由前述详细说明约束或限制。
[0068]
进一步的示例
[0069]
示例1.一种方法,包括:
[0070]
当在密封的存储设备中的换能头与相邻存储表面之间保持固定有源间隙时,获得为温度的线性函数的目标致动效率斜率,其中,所述目标效率斜率是至少部分地通过对致动效率的温度相关校准获得的;
[0071]
测量所述存储设备的操作温度;以及
[0072]
调整提供给间隙调整机构的功率,以在测量的操作温度上实现目标致动效率斜率。
[0073]
示例2.根据示例1所述的方法,其中,调整提供给所述间隙调整机构的功率包括调整提供给位于所述换能头内的加热器的功率,其中,所述加热器通过加热器引发的读取器突伸(hirp)向所述换能头提供致动效率,并且所述目标致动效率斜率包括目标hirp斜率。
[0074]
示例3.根据示例2所述的方法,其中,所述温度相关校准包括:
[0075]
获得第一温度上的局部有源致动效率(hirp)斜率;以及
[0076]
获得第二温度上的局部有源致动效率(hirp)斜率;
[0077]
其中,所述第一温度高于所述第二温度。
[0078]
示例4.根据示例3所述的方法,其中,获得所述目标hirp斜率进一步包括:
[0079]
基于所述第一温度上的局部有源hirp斜率和所述第二温度上的局部有源hirp斜率计算hirp斜率温度灵敏度(hsts);
[0080]
基于所述校准、所述hsts以及测量的操作温度的函数计算所述目标hirp斜率;以及
[0081]
保存所述目标hirp斜率。
[0082]
示例5.根据示例3所述的方法,其中,获得所述第一温度上的局部有源hirp斜率包括在从无源状态到使所述换能头与所述相邻存储表面近乎接触的状态来增加加热器功率(加热器dac)的同时测量hirp,以及对所述第一温度上的hirp对比加热器dac数据执行不受约束的回归。
[0083]
示例6.根据示例5所述的方法,进一步包括对所述第一温度上的不受约束的回归进行外推,以获得所述换能头近乎接触所述相邻存储表面的加热器dac上的第一hirp。
[0084]
示例7.根据示例6所述的方法,进一步包括对所述第一温度上的不受约束的回归
进行外推,以获得针对目标间隙的已知有源飞行高度(afh)加热器dac上的第二hirp,以及从所述第一hirp减去所述第二hirp以确定目标间隙。
[0085]
示例8.根据示例7所述的方法,进一步包括对所述第一温度上的hirp对比加热器dac数据执行受约束的回归,从而使用来自所述第一温度上的受约束的回归的系数获得针对目标间隙的afh加热器dac上的局部有源hirp斜率。
[0086]
示例9.根据示例8所述的方法,其中,获得所述第二温度上的局部有源hirp斜率包括在从无源状态到使所述换能头与所述相邻存储表面近乎接触的状态来增加加热器dac的同时测量hirp,以及对所述第二温度上的hirp对比加热器dac数据执行不受约束的回归。
[0087]
示例10.根据示例9所述的方法,进一步包括:对所述第二温度上的不受约束的回归进行外推,以获得无源间隙;从所述无源间隙减去在所述第一温度上的校准期间获得的目标间隙,以获得第三hirp;以及在所述第三hirp上对所述第二温度的不受约束的回归进行外推,以获得实现目标间隙的加热器dac。
[0088]
示例11.根据示例10所述的方法,进一步包括对所述第二温度上的hirp对比加热器dac数据执行受约束的回归,从而使用来自所述第二温度上的受约束的回归的系数获得用以实现目标间隙的加热器dac上的局部有源hirp斜率。
[0089]
示例12.一种控制系统,包括:
[0090]
被配置为在密封的存储设备中的换能头与相邻存储表面之间保持固定有源间隙的间隙致动机构;
[0091]
被配置为测量所述密封的存储设备的操作温度的温度传感器;以及
[0092]
被配置为调整提供给所述间隙致动机构的功率直到在测量的操作温度上实现目标致动效率斜率为止的处理电路,其中,所述目标致动效率斜率当在所述换能头与所述相邻存储表面之间保持所述固定有源间隙时是温度的线性函数,并且是至少部分地通过对致动效率的温度相关校准获得的。
[0093]
示例13.根据示例12所述的控制系统,其中,所述间隙调整机构包括位于所述换能头内的加热器,其中,所述加热器通过加热器引发的读取器突伸(hirp)向所述换能头提供致动效率,并且其中,所述目标致动效率斜率包括目标hirp斜率。
[0094]
示例14.根据示例13所述的控制系统,其中,在第一温度上执行所述温度相关校准,以获得第一局部hirp斜率,并且在第二温度上执行所述温度相关校准,以获得第二局部hirp斜率,所述第一温度高于所述第二温度。
[0095]
示例15.根据示例14所述的控制系统,其中,基于所述校准,计算hirp斜率温度灵敏度(hsts)。
[0096]
示例16.根据示例15所述的控制系统,其中,基于所述校准和hsts计算,作为测量的操作温度的函数计算目标hirp斜率,并且保存所述目标hirp斜率。
[0097]
示例17.一种方法,包括:
[0098]
当在密封的存储设备中的换能头与相邻表面之间保持固定有源间隙时,产生为温度的线性函数的目标致动效率斜率;
[0099]
测量所述存储设备的操作温度;
[0100]
产生对应于测量的操作温度的测量的致动效率斜率;以及
[0101]
调整提供给间隙调整机构的功率,以保持所述换能头相对于所述相邻存储表面的
有源间隙,直到测量的致动效率斜率匹配所述目标致动效率斜率为止。
[0102]
示例18.根据示例17所述的方法,其中,调整提供给所述间隙调整机构的功率包括调整提供给位于所述换能头内的加热器的功率,其中,所述加热器通过加热器引发的读取器突伸(hirp)向所述换能头提供致动效率,并且所述目标致动效率斜率包括目标hirp斜率。
[0103]
示例19.根据示例18所述的方法,其中,产生所述目标致动效率斜率包括在第一温度上校准温度相关致动效率,以获得局部有源致动效率(hirp)斜率,以及在第二温度上校准温度相关致动效率,以获得局部有源致动效率(hirp)斜率,所述第一温度高于所述第二温度。
[0104]
示例20.根据示例19所述的方法,其中,产生所述目标致动效率斜率包括:
[0105]
基于所述第一温度上的局部有源hirp斜率和所述第二温度上的局部有源hirp斜率计算hirp斜率温度灵敏度(hsts);
[0106]
基于所述校准、所述hsts以及测量的操作温度的函数计算所述目标hirp斜率;以及
[0107]
保存所述目标hirp斜率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。