1.本发明涉及车辆控制装置、车辆控制方法以及车辆控制系统。
背景技术:
2.在专利文献1中公开了一种车辆控制装置,在使车辆沿着目标行驶路径行驶的自动驾驶控制中产生了与障碍物的碰撞风险的情况下,进行优先于自动驾驶控制而避开障碍物的自动紧急避开转向操作。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2017/154070号
技术实现要素:
6.发明要解决的课题
7.但是,在上述专利文献1所示的技术中,虽然事先向驾驶员告知自动紧急避开转向操作的执行,但是在执行自动紧急避开转向操作时若驾驶员与方向盘接触,则有可能妨碍自动紧急避开转向操作。
8.本发明的目的之一在于提供一种能够抑制驾驶员妨碍自动紧急避开转向操作的车辆控制装置、车辆控制方法以及车辆控制系统。
9.用于解决课题的方案
10.在本发明一实施方式的车辆控制装置中,控制部在转移到自动紧急避开转向操作模式时,输出以对驾驶员进行用于促使驾驶员不与方向盘接触的告知的方式控制告知部的第一告知指令。
11.因此,根据本发明的一实施方式,能够抑制驾驶员妨碍自动紧急避开转向操作。
附图说明
12.图1是实施方式1的车辆控制系统的结构图。
13.图2是表示实施方式1的驾驶辅助控制的流程的流程图。
14.图3是表示实施方式1的驾驶辅助控制的流程的流程图。
具体实施方式
15.〔实施方式1〕
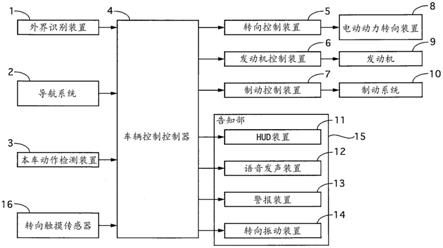
16.图1是实施方式1的车辆控制系统的结构图。
17.实施例1的车辆控制系统搭载于将发动机9作为动力源的车辆。外界识别装置(外界识别部)1从搭载于本车(车辆)的摄像头、激光雷达、gnss(global navigation satellite system:全球导航卫星系统)接收机、地图数据库等,取得本车的周边环境(道路形状、白线等)、本车的当前位置作为外界信息。导航系统2设定从本车的当前位置到驾驶员
设定的目的地的目标行驶路径,并对驾驶员进行路径引导。本车动作检测装置3根据检测前轮的转向角的转向角传感器、检测车速的车速传感器、检测横向g的横向g传感器、检测横摆率的横摆率传感器、转向信号等各信号检测本车的动作。车辆控制控制器(控制部)4在包括由驾驶员进行的驾驶辅助的选择(例如,驾驶辅助选择按钮接通)在内的规定的驾驶辅助开始条件成立时,执行驾驶辅助控制。
18.车辆控制控制器4在驾驶辅助控制中进行转向操作控制以及车速控制,以使本车基于目标行驶路径自动行驶。具体而言,车辆控制控制器4在驾驶辅助控制中,基于本车的周边环境、本车的动作来运算转向操作控制中的前轮的目标转向角,并且运算车速控制中的本车的目标车速。转向控制装置5驱动电动动力转向装置(转向操作致动器)8,以使前轮的转向角成为目标转向角。节气门控制装置6驱动发动机(驱动致动器)9,以使本车的车速成为目标车速。制动控制装置7驱动制动系统(制动致动器)10,以使本车的车速成为目标车速。
19.实施例1的车辆控制系统具有hud(head up display:平视显示器)装置11、语音发声装置12、警报装置13以及转向振动装置14,作为对驾驶员进行告知的告知部15。hud装置11将车速等车辆信息、导航系统2的路径引导等作为虚像显示于本车的前窗。语音发声装置12将各种警报、导航系统2的路径引导等作为合成语音发声。警报装置13发出警报音来进行各种警报。转向振动装置14使方向盘振动而进行各种警报。另外,车辆控制系统具有转向触摸传感器16。转向触摸传感器16检测驾驶员是否握住方向盘。
20.车辆控制控制器4在驾驶辅助控制中存在与前方的障碍物碰撞的可能性并且判断为由驾驶员进行的避开转向操作无法避开碰撞的情况下,向自动紧急避开转向操作模式转移。在自动紧急避开转向操作模式中,在障碍物的左右找出既不存在相向车也不存在后续车的避开区域,设定使本车朝向避开区域行驶的目标行驶路径,驱动电动动力转向装置8以使本车沿着目标行驶路径自动行驶。在此,在常规的转向操作装置中,方向盘与前轮(的转向操作机构)机械连结。因此,在驾驶员与方向盘接触的状态下执行自动紧急避开转向操作的情况下,由电动动力转向装置8的驱动进行的前轮的转向被驾驶员阻碍。在该情况下,无法得到实现目标行驶路径的转向角,因此,有可能给障碍物的避开带来障碍。另外,在通过自动紧急避开转向操作而使前轮的转向角急剧变化的情况下,方向盘比较高速地旋转,因此,驾驶员的手臂可能被卷入方向盘或者驾驶员的手指与方向盘辐条剧烈接触。
21.因此,在实施方式1的车辆控制系统中,以解决上述问题为目的,车辆控制控制器4执行以下所示的驾驶辅助控制。
22.图2以及图3是表示实施方式1的驾驶辅助控制的流程的流程图。
23.在步骤s101中,由外界识别装置1取得并识别外界信息(道路形状、白线、本车位置等)。
24.在步骤s102中,基于识别出的外界信息以及驾驶员设定的目的地来设定目标行驶路径。
25.在步骤s103中,驱动各致动器(电动动力转向装置8、发动机9以及制动系统10),以使本车沿着目标行驶路径行驶。
26.在步骤s104中,判定外界识别装置1是否在前方的目标行驶路径上发现了障碍物。在是的情况下进入步骤s105,在否的情况下进入返回。
27.在步骤s105中,根据本车位置以及障碍物的位置,计算本车与障碍物之间的距离。
28.在步骤s106中,根据本车与障碍物之间的距离、本车的车速等,判定本车是否与障碍物碰撞。在是的情况下进入步骤s107,在否的情况下进入返回。
29.在步骤s107中,通过向hud装置11的显示、来自语音发声装置12的语音输出以及来自警报装置13的警报音输出,对驾驶员告知与障碍物碰撞的情况。由显示进行的告知也可以使用导航系统2的显示器(触摸面板)、仪表板的灯。
30.在步骤s108中,参照根据本车与障碍物之间的距离以及本车的车速而预先设定的碰撞预测映射,计算到与障碍物碰撞为止的时间。
31.在步骤s109中,根据到与障碍物碰撞为止的时间是否存在足够的富余来判定是否能够切换到由驾驶员进行的手动驾驶。在是的情况下进入步骤s110,在否的情况下进入步骤s114。在该步骤中,在到与障碍物碰撞为止的时间比阈值长的情况下,判定为到与障碍物碰撞为止的时间存在足够的富余。
32.在步骤s110中,对hud装置11、语音发声装置12以及警报装置13输出以进行用于促使驾驶员通过手动驾驶来避开障碍物的告知的方式进行控制的指令(第二告知指令)。
33.在步骤s111中,在从步骤s110的告知开始起到经过第一规定时间为止的期间,判定向手动驾驶的切换是否完成。在是的情况下进入步骤s112,在否的情况下进入步骤s114。在该步骤中,在由转向触摸传感器16检测到驾驶员握住方向盘的情况下,判定为向手动驾驶的切换完成。
34.在步骤s112中,作为避开障碍物的避开动作模式,向驾驶员避开转向操作模式转移。驾驶员避开转向操作模式是根据由驾驶员的手动操作进行转向的方向盘的转向操作角来使前轮转向的模式。在驾驶员避开转向操作模式中,电动动力转向装置8作为对驾驶员的转向操作进行辅助的常规的电动动力转向装置进行动作。
35.在步骤s113中,判定是否避开了障碍物。在是的情况下进入返回,在否的情况下向步骤s112返回。
36.在步骤s114中,对hud装置11、语音发声装置12以及警报装置13输出以进行用于促使驾驶员不与方向盘接触的告知的方式进行控制的指令(第一告知指令)。
37.在步骤s115中,通过转向触摸传感器16,在从步骤s114的告知开始起到经过第二规定时间为止的期间,判定驾驶员是否从方向盘放手。在是的情况下进入步骤s117,在否的情况下进入步骤s116。
38.在步骤s116中,对hud装置11、语音发声装置12、警报装置13以及转向振动装置14输出以进行用于促使驾驶员不与方向盘接触的告知的方式进行控制的指令(第一告知指令)。在此,方向盘不连续地或与警报音连动地振动。
39.在步骤s117中,作为避开障碍物的避开动作模式,向自动紧急避开转向操作模式转移。在自动紧急避开转向操作模式中,基于障碍物的位置(第一位置信息)和本车位置(第二位置信息),设定使本车朝向避开区域行驶的目标行驶路径,并实施以使本车沿着目标行驶路径自动行驶的方式驱动电动动力转向装置8的自动紧急避开转向操作控制。
40.在步骤s118中,判定是否避开了障碍物。在是的情况下进入返回,在否的情况下向步骤s117返回。
41.接着,说明实施方式1的作用效果。
42.实施方式1的车辆控制控制器4取得由外界识别装置1取得的与本车的前方的障碍物相关的信息,在基于取得的障碍物的位置和本车位置,转移到通过电动动力转向装置8的控制来避开障碍物的自动紧急避开转向操作模式时,输出以进行用于促使驾驶员不与方向盘接触的告知的方式控制告知部15的第一告知指令(s114、s116)。以往,仅在执行自动紧急避开转向操作之前向驾驶员告知,但在实施方式1中,通过在执行自动紧急避开转向操作之前向驾驶员告知不与方向盘接触,能够抑制在驾驶员与方向盘接触的状态下执行自动紧急避开转向操作。由此,能够抑制驾驶员妨碍自动紧急避开转向操作。
43.车辆控制控制器4取得基于由外界识别装置1取得的外界信息而求出的本车的目标行驶路径,执行对本车的电动动力转向装置8、发动机9以及制动系统10进行控制的驾驶辅助控制,以使本车沿着目标行驶路径行驶,在正在执行驾驶辅助控制的状态下,在转移到自动紧急避开转向操作模式时,输出第一告知指令。由此,能够抑制驾驶员妨碍针对在驾驶辅助控制中出现的障碍物的自动紧急避开转向操作。
44.第一告知指令包括为了进行对方向盘施加振动的振动告知而控制告知部15(转向振动装置14)的指令(s116)。由此,在驾驶员握住方向盘的情况下,通过振动存在皮肤感觉地传递信息,从而更容易反射性地放手。因此,能够促使驾驶员从方向盘放手,能够抑制驾驶员妨碍自动紧急避开转向操作。
45.第一告知指令包括为了对驾驶员进行视觉告知或听觉告知而控制告知部15(hud装置11、语音发声装置12、警报装置13)的指令(s116)。除振动告知之外,还进行视觉告知或听觉告知,从而能够进一步促使驾驶员从方向盘放手。
46.第一告知指令是使振动告知与作为听觉告知的警报音连动来控制告知部15(转向振动装置14、警报装置13)的指令。通过使振动告知和听觉告知连动,容易注意到告知,因此,能够进一步促使驾驶员从方向盘放手。
47.第一告知指令是为了进行振动告知和作为听觉告知的警报音以及语音告知而控制告知部15(转向振动装置14、语音发声装置12、警报装置13)的例子。通过进行基于语音的告知,驾驶员能够更准确地识别告知的内容,因此,能够进一步促使驾驶员从方向盘放手。
48.第一告知指令是为了不连续地进行振动告知而控制告知部15(转向振动装置14)的指令。在此,假设在连续地进行了振动告知的情况下,有可能误识别为道路噪音而不会注意到告知。因此,通过不连续地进行振动告知,能够抑制误识别为道路噪音,能够进一步促使驾驶员从方向盘放手。
49.作为第一告知指令,车辆控制控制器4输出为了对驾驶员进行视觉告知或听觉告知而控制告知部15(hud装置11、语音发声装置12、警报装置13)的指令,在经过第二规定时间后与方向盘接触的情况下,输出为了进行对方向盘施加振动的振动告知而控制告知部15(转向振动装置14)的指令。通过在两个阶段进行告知,且第二次进行比第一次强的告知(驾驶员更容易注意的告知),能够进一步促使驾驶员从方向盘放手。
50.车辆控制控制器4在正在执行驾驶辅助控制时,基于障碍物的位置和本车位置,选择自动紧急避开转向操作模式和通过由驾驶员进行的方向盘的操作来避开障碍物的驾驶员避开转向操作模式中的任一个作为障碍物的避开动作模式,在避开动作模式为自动紧急避开转向操作模式的情况下,输出用于控制告知部15的第一告知指令,在避开动作模式为驾驶员避开转向操作模式的情况下,输出与第一告知指令不同的用于控制告知部15的第二
告知指令。即,通过在自动紧急避开转向操作模式和驾驶员避开转向操作模式下进行互不相同的告知,能够更可靠地对驾驶员告知避开动作模式向自动紧急避开转向操作模式和驾驶员避开转向操作模式中的哪一个转移。
51.第一告知指令是为了进行对方向盘施加振动的振动告知而控制告知部15(转向振动装置14)的指令,第二告知指令是为了对驾驶员进行视觉告知或听觉告知而控制告知部15(hud装置11、语音发声装置12、警报装置13)的指令。在此,在驾驶员握住方向盘进行操作的情况下,若使方向盘振动,则驾驶员可能会因伴随着振动的摇晃而误放手。因此,在转移到驾驶员避开转向操作模式的情况下,通过不实施振动告知,从而能够抑制驾驶员误从方向盘放手。
52.车辆控制控制器4在输出第二告知指令后,在避开动作模式未转移到驾驶员避开转向操作模式的情况下,输出第一告知指令。由此,在驾驶员未注意到告知的情况下、或者无法由驾驶员的手动操作进行障碍物避开的情况下,能够向驾驶员告知取消驾驶员避开转向操作模式而向自动紧急避开转向操作模式转移,能够促使驾驶员从方向盘放手。
53.〔其他实施方式〕
54.以上,对用于实施本发明的实施方式进行了说明,但本发明的具体结构并不限于实施方式的结构,在不脱离发明的要点的范围内的设计变更等也包含在本发明中。
55.本发明在应用于搭载有将方向盘与前轮(的转向操作机构)机械地连结的转向操作装置的车辆的情况下,起到特别显著的效果,但本发明也能够应用于搭载有将方向盘与前轮机械地切断的所谓线控转向方式的转向操作装置的车辆,起到与实施方式同样的作用效果。
56.在实施方式中,示出如下例子:在正在执行驾驶辅助控制的状态下,在转移到自动紧急避开转向操作模式时,输出以对驾驶员进行用于促使驾驶员不与方向盘接触的告知的方式控制告知部的第一告知指令,但也可以在从未执行驾驶辅助控制的状态转移到自动紧急避开转向操作模式时,输出以对驾驶员进行用于促使驾驶员不与方向盘接触的告知的方式控制告知部的第一告知指令。
57.关于从以上说明的实施方式能够掌握的技术思想,记载如下。
58.车辆控制装置在其一个方案中,
59.具备控制部,所述控制部设置于具备对车辆的驾驶员进行告知的告知部的所述车辆,
60.所述控制部基于所输入的信息进行运算,并将运算出的结果输出到所述告知部,
61.所述控制部取得由外界识别部取得的与所述车辆的前方的障碍物相关的信息,在基于取得的与所述障碍物的位置相关的第一位置信息和与所述车辆的位置相关的第二位置信息,转移到通过所述车辆的转向操作致动器的控制来避开所述障碍物的自动紧急避开转向操作模式时,输出以对所述驾驶员进行用于促使所述驾驶员不与所述方向盘接触的告知的方式控制所述告知部的第一告知指令。
62.在更优选的方案中,在上述方案中,所述控制部取得基于由所述外界识别部取得的外界信息而求出的所述车辆行驶的目标行驶路径,执行对所述车辆的驱动致动器、制动致动器以及所述转向操作致动器进行控制的驾驶辅助控制,以使所述车辆沿着所述目标行驶路径行驶,在正在执行所述驾驶辅助控制的状态下,在转移到所述自动紧急避开转向操
作模式时,输出所述第一告知指令。
63.在另一优选方案中,在上述方案的任一方案中,所述第一告知指令包括为了进行对所述方向盘施加振动的振动告知而控制所述告知部的指令。
64.在又一优选方案中,在上述方案的任一方案中,所述第一告知指令包括为了对所述驾驶员进行视觉告知或听觉告知而控制所述告知部的指令。
65.在又一优选方案中,在上述方案的任一方案中,所述第一告知指令是使所述振动告知与作为所述听觉告知的警报音连动来控制所述告知部的指令。
66.在又一优选方案中,在上述方案的任一方案中,所述第一告知指令是为了进行所述振动告知和作为所述听觉告知的警报音以及语音告知而控制所述告知部的指令。
67.在又一优选方案中,在上述方案的任一方案中,所述第一告知指令是为了不连续地进行所述振动告知而控制所述告知部的指令。
68.在又一优选方案中,在上述方案的任一方案中,作为所述第一告知指令,所述控制部输出为了对所述驾驶员进行视觉告知或听觉告知而控制所述告知部的指令,在经过规定时间后所述驾驶员与所述方向盘接触的情况下,所述控制部输出为了进行对所述方向盘施加振动的振动告知而控制所述告知部的指令。
69.在又一优选方案中,在上述方案的任一方案中,所述控制部在正在执行所述驾驶辅助控制时,基于所述第一位置信息和所述第二位置信息,选择所述自动紧急避开转向操作模式和通过由所述驾驶员进行的所述方向盘的操作来避开所述障碍物的驾驶员避开转向操作模式中的任一个作为所述障碍物的避开动作模式,在所述避开动作模式为所述自动紧急避开转向操作模式的情况下,所述控制部输出用于控制所述告知部的所述第一告知指令,在所述避开动作模式为所述驾驶员避开转向操作模式的情况下,所述控制部输出与所述第一告知指令不同的用于控制所述告知部的第二告知指令。
70.在又一优选方案中,在上述方案的任一方案中,所述第一告知指令是为了进行对所述方向盘施加振动的振动告知而控制所述告知部的指令,所述第二告知指令是为了对所述驾驶员进行视觉告知或听觉告知而控制所述告知部的指令。
71.在又一优选方案中,在上述方案的任一方案中,所述控制部在输出所述第二告知指令后,在所述避开动作模式未转移到所述驾驶员避开转向操作模式的情况下,输出所述第一告知指令。
72.另外,从其他观点出发,车辆控制装置在某方案中,
73.具备控制部,所述控制部设置于具备对车辆的驾驶员进行告知的告知部的所述车辆,
74.所述控制部基于所输入的信息进行运算,并将运算出的结果输出到所述告知部,
75.所述控制部取得由外界识别部取得的与所述车辆的前方的障碍物相关的信息,基于取得的与所述障碍物的位置相关的第一位置信息和与所述车辆的位置相关的第二位置信息,选择通过所述车辆的转向操作致动器的控制来避开所述障碍物的自动紧急避开转向操作模式和通过由所述驾驶员进行的所述方向盘的操作来避开所述障碍物的驾驶员避开转向操作模式中的任一个作为所述障碍物的避开动作模式,在所述避开动作模式为所述自动紧急避开转向操作模式的情况下,所述控制部输出用于控制所述告知部的第一告知指令,在所述避开动作模式为所述驾驶员避开转向操作模式的情况下,所述控制部输出与所
述第一告知指令不同的用于控制所述告知部的第二告知指令。
76.优选的是,在上述方案中,所述控制部取得基于由所述外界识别部取得的外界信息而求出的所述车辆行驶的目标行驶路径,执行对所述车辆的驱动致动器、制动致动器以及所述转向操作致动器进行控制的驾驶辅助控制,以使所述车辆沿着所述目标行驶路径行驶,在正在执行所述驾驶辅助控制的状态下,选择所述自动紧急避开转向操作模式和所述驾驶员避开转向操作模式中的任一个作为所述障碍物的避开动作模式。
77.在另一优选方案中,在上述方案的任一方案中,所述第一告知指令是为了进行对所述方向盘施加振动的振动告知而控制所述告知部的指令,所述第二告知指令是为了对所述驾驶员进行视觉告知或听觉告知而控制所述告知部的指令。
78.并且,从其他观点出发,车辆控制方法在某方案中,是具备对车辆的驾驶员进行告知的告知部的所述车辆的车辆控制方法,其中,取得由外界识别部取得的与所述车辆的前方的障碍物相关的信息,在基于取得的与所述障碍物的位置相关的第一位置信息和与所述车辆的位置相关的第二位置信息,转移到通过所述车辆的转向操作致动器的控制来避开所述障碍物的自动紧急避开转向操作模式时,输出以对所述驾驶员进行用于促使所述驾驶员不与所述方向盘接触的告知的方式控制所述告知部的第一告知指令。
79.优选的是,在上述方案中,取得基于由所述外界识别部取得的外界信息而求出的所述车辆行驶的目标行驶路径,执行对所述车辆的驱动致动器、制动致动器以及所述转向操作致动器进行控制的驾驶辅助控制,以使所述车辆沿着所述目标行驶路径行驶,在正在执行所述驾驶辅助控制的状态下,在转移到所述自动紧急避开转向操作模式时,输出所述第一告知指令。
80.并且,从其他观点出发,车辆控制系统在某方案中,具备:告知部,所述告知部对车辆的驾驶员进行告知;外界识别部,所述外界识别部取得所述车辆的外界信息;所述车辆的转向操作致动器;以及控制部,所述控制部取得由外界识别部取得的与所述车辆的前方的障碍物相关的信息,在基于取得的与所述障碍物的位置相关的第一位置信息和与所述车辆的位置相关的第二位置信息,转移到通过所述转向操作致动器的控制来避开所述障碍物的自动紧急避开转向操作模式时,所述控制部输出以对所述驾驶员进行用于促使所述驾驶员不与所述方向盘接触的告知的方式控制所述告知部的第一告知指令。
81.优选的是,在上述方案中,具备所述车辆的驱动致动器和所述车辆的制动致动器,所述控制部取得基于由所述外界识别部取得的外界信息而求出的所述车辆行驶的目标行驶路径,执行对所述驱动致动器、所述制动致动器以及所述转向操作致动器进行控制的驾驶辅助控制,以使所述车辆沿着所述目标行驶路径行驶,在正在执行所述驾驶辅助控制的状态下,在转移到所述自动紧急避开转向操作模式时,输出所述第一告知指令。
82.另外,本发明并不限于上述实施方式,包括各种变形例。例如,上述实施方式为了容易理解地说明本发明而详细地进行了说明,但并不限定于必须具备已说明的全部结构。另外,可以将某实施方式的结构的一部分替换为其他实施方式的结构,另外,也可以在某实施方式的结构上增加其他实施方式的结构。另外,关于各实施方式的结构的一部分,能够进行其他结构的追加、删除、替换。
83.本技术要求2019年5月29日提出的日本专利申请第2019
‑
100370号的优先权。包括2019年5月29日提出的日本专利申请第2019
‑
100370号的说明书、权利要求书、附图以及摘
要在内的全部公开内容通过参照而作为整体被引入本技术中。
84.附图标记说明
85.1外界识别装置(外界识别部)4车辆控制控制器(控制部)8电动动力转向装置(转向操作致动器)9发动机(驱动致动器)10制动系统(制动致动器)15告知部
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
