半导体装置中参数稳定的错位测量改善
1.相关申请案的引用
2.特此参考在2019年3月21日申请且标题为“基于叠对误差随测量条件变化的动态准确度优化(dynamic accuracy optimization based on overlay error variation with measurement conditions)”的第62/821,596号美国临时专利申请案,所述案的公开内容特此以引用的方式并入,且特此要求所述案的优先权。
技术领域
3.本发明大体上涉及半导体装置制造中的错位的测量。
背景技术:
4.已知用于半导体装置制造中的错位的测量的各种方法及系统。
技术实现要素:
5.本发明试图提供一种用于半导体装置制造中的错位的测量的经改进方法及系统。
6.因此,根据本发明的优选实施例,提供一种参数稳定的错位测量改善方法,其包含:提供选自希望相同的一批晶片的晶片,包含形成在其上的多个多层半导体装置;使用错位计量工具来使用多个测量参数集在所述晶片的至少第一层与第二层之间的多个位点处测量错位,借此针对所述测量参数集中的每一者生成经测量错位数据;针对所述测量参数集中的每一者从所述晶片的所述经测量错位数据识别及移除参数相依部分及平均误差部分,借此生成所述晶片的经改善参数稳定的经改善错位数据。
7.根据本发明的优选实施例,所述测量参数集至少包括在错位测量中使用的多个光波长。
8.优选地,所述识别所述参数相依部分及所述平均误差部分包含:针对所述测量参数集中的每一者识别所述经测量错位数据的参数相依部分;针对所述测量参数集中的每一者识别所述错位数据的所述参数相依部分的至少一个主分量;针对所述参数集中的每一者识别所述经测量错位数据的所述参数相依部分的所述至少一个主分量的加权系数;及识别至少一个平均误差部分,所述平均误差部分中的每一者与针对所述测量参数集中的每一者的所述经测量错位数据的所述参数相依部分的所述至少一个主分量中的每一者对应。
9.根据本发明的优选实施例,所述参数稳定的错位测量改善方法还包含:使用所述参数相依部分及所述平均误差部分来针对所述测量参数集中的每一者从选自希望相同的所述批晶片的至少一个额外晶片的经测量错位数据识别及移除参数相依部分及平均误差部分,借此生成所述至少一个额外晶片的经改善参数稳定的经改善错位数据。
10.根据本发明的优选实施例,所述错位计量工具为成像错位计量工具。替代地,根据本发明的优选实施例,所述错位计量工具为散射测量错位计量工具。
11.优选地,使用主分量分析来识别针对所述测量参数集中的每一者的所述错位数据的所述参数相依部分的所述至少一个主分量。
12.根据本发明的优选实施例,使用参考错位值来识别所述平均误差部分。优选地,通过使用参考错位计量工具来测量所述晶片而生成所述参考错位值。优选地,所述参考错位工具为电子束错位计量工具。
13.替代地,根据本发明的优选实施例,使用统计模型来识别所述平均误差部分。优选地,从所述晶片的多个错位测量编译所述统计模型。优选地,所述统计模型包含经建模部分及未建模部分。
14.根据本发明的优选实施例,所述测量参数集包括以下中的至少一者:错位测量中的焦点可变性、在错位测量中使用的数值孔径、在错位测量中使用的光的入射角度,及在错位测量中使用的光的偏振。
15.根据本发明的另一优选实施例,还提供一种参数稳定的错位测量改善系统,其包含:错位计量工具,其可操作以使用多个测量参数集来在选自希望相同的一批晶片的包含形成在其上的多个多层半导体装置的晶片的至少第一层与第二层之间的多个位点处测量错位,借此针对所述参数中的每一者生成经测量错位数据;及错位数据分析器,其可操作以针对所述测量参数集中的每一者从所述晶片的所述经测量错位数据识别及移除参数相依部分及平均误差部分,借此生成所述晶片的经改善参数稳定的经改善错位数据。
附图说明
16.从结合附图进行的下文详细描述将更全面理解及明白本发明,其中:
17.图1是参数稳定的错位测量改善系统的简化示意图;及
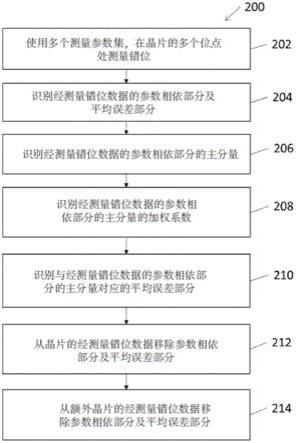
18.图2是说明可由图1的参数稳定的错位测量改善系统使用的参数稳定的错位测量改善方法的简化流程图。
具体实施方式
19.应了解,在下文参考图1及2描述的系统及方法形成半导体装置的制造工艺的部分,且由在下文参考图1及2描述的系统及方法测量的错位被用于调整半导体装置的制作工艺以更紧密地对准所制作的半导体装置的各个层。
20.现参考图1及2,图1是参数稳定的错位测量改善系统(psmmas)100的简化示意图,图2是说明可由psmmas 100使用的参数稳定的错位测量改善方法(psmmam)200的简化流程图。
21.如图1中所见,psmmas 100包含错位计量工具110及错位数据分析器120。错位计量工具110可为具有使用多个测量参数集来测量错位的能力的任何适合错位计量工具,例如成像错位计量工具或散射测量错位计量工具。优选地,参数包含在测量错位时使用的多个光波长。形成psmmas 100的部件的典型成像错位计量工具为archer
tm
700,其在商业上可购自加利福尼亚州苗必达市的kla公司。形成psmmas 100的部件的典型散射测量错位计量工具为atl100
tm
,其在商业上可购自加利福尼亚州苗必达市的kla公司。
22.如图2中所见,在第一步骤202处,提供选自希望相同的一批晶片的晶片,包含形成在其上的多个多层半导体装置,且错位计量工具110使用多个测量参数集λ(优选地包含多个光波长)来在晶片的至少第一层与第二层之间的多个位点s处测量错位,也被称为叠对,借此针对每一位点且针对参数集中的每一者生成经测量错位数据ovl(λ,s)。应了解,希望
相同的所述批晶片中的晶片中的每一者经历相同制作步骤且包含半导体装置,所述半导体装置希望与希望相同的所述批晶片中的全部其它晶片上的对应半导体装置相同。
23.通常,在步骤202处测量的晶片包含具有包含在经测量位点中的每一者中的某一数目n个变形的特征。因此,经测量错位数据ovl(λ,s)可包含来自第一层与第二层之间的错位ovl0(s)的分量,以及来自每一变形特征矢量∈
k
(λ,s)的分量,如等式1中所描述:
[0024][0025]
其中k为指示变形的指数,且α
k
(s)为每一变形特征矢量∈
k
(λ,s)的加权系数。应注意,与晶片的错位ovl0(s)不同,来自每一变形特征矢量∈
k
(λ,s)的项取决于在错位测量中使用的参数,例如光波长。进一步应注意,每一变形特征矢量∈
k
(λ,s)包含来自参数相依部分ε
k
(λ,s)及平均误差部分μ
k
(s)两者的项,如等式2中所见
[0026]
∈
k
(λ,s)=ε
k
(λ,s) μ
k
(s)
ꢀꢀ
(等式2)
[0027]
应注意,参数相依部分ε
k
(λ,s)及平均误差部分μ
k
(s)两者皆得自相同第k个变形。因此,参数相依部分ε
k
(λ,s)及平均误差部分μ
k
(s)两者与第k个变形的幅度成比例,且因此参数相依部分ε
k
(λ,s)及平均误差部分μ
k
(s)在数学上彼此相关。
[0028]
为了求解等式1及2且因此识别第一层与第二层之间的错位ovl0(s),psmmam 200继续求解额外等式,如下文进一步参考图2a及2b描述。
[0029]
在下一步骤204处,如等式3中所见,错位数据分析器120针对每一位点s且针对每一参数集λ识别经测量错位数据ovl(λ,s)的参数相依部分ovl
ε
(λ,s),且针对每一位点s识别在步骤202处生成的经测量错位数据ovl(λ,s)的平均误差部分ovl
μ
(s)。
[0030]
ovl(λ,s)=ovl
ε
(λ,s) ovl
μ
(s)
ꢀꢀꢀ
(等式3)
[0031]
应注意,在等式3中,平均误差部分ovl
μ
(s)包含晶片的错位ovl0(s)及与经测量错位数据ovl(λ,s)相关联的平均误差部分两者。
[0032]
在下一步骤206处,错位数据分析器120使用对经测量错位数据ovl(λ,s)的参数相依部分的集合{ovl
ε
(λ,s)}的主分量分析(pca)来识别与包含在步骤202处测量的位点s中的每一者中的n个变形对应的主分量的集合{ε
k
(λ,s)}。
[0033]
在下一步骤208处,错位数据分析器120通过识别最小化度量m1的加权系数α
k
(s)的值而识别等式1的适合加权系数α
k
(s),所述度量m1如等式4中所定义:
[0034][0035]
应注意,针对主分量的单范正交集{ε
k
(λ,s)},等式4表示{ovl
ε
(λ,s)}到{ε
k
(λ,s)}上的投影。
[0036]
在下一步骤210处,错位数据分析器120识别与在步骤206处针对每一经测量位点s识别的主分量ε
k
(λ,s)中的每一者对应的平均误差部分μ
k
。在本发明的优选实施例中,使用等式5来识别平均误差部分μ
k
(s):
[0037]
ovl
r
(s)=ovl
μ
(s)
‑
σ
k
α
k
(s)μ
k
(s)
ꢀꢀꢀ
(等式5)
[0038]
其中ovl
r
(s)为在步骤202处测量的晶片的每一位点的参考错位值,且psmmam200针对在步骤202处测量的全部位点s识别导致等式5的左手侧与右手侧之间的最佳匹配的平均误差部分μ
k
(s)。
[0039]
优选地,通过使用参考错位计量工具来测量在步骤202处测量的晶片的错位而生成参考错位ovl
r
(s)。典型参考错位计量工具为电子束错位计量工具,例如edr7xxx
tm
,其在商业上可购自美国加利福尼亚州苗必达市的kla公司。其它适合参考错位计量工具尤其包含光学工具、sem工具、tem工具及afm工具。
[0040]
在本发明的替代实施例中,从在步骤202处测量的晶片的多个(优选至少200个)错位测量编译统计模型。通常,错位测量中的每一者包含与实际装置错位对应的经建模部分,及与变形对应的未建模部分。通过识别最小化度量m2的平均误差部分μ
k
(s)的值而识别平均误差部分μ
k
(s),所述度量m2如等式6中所定义:
[0041]
m2=∑
s
[ovl
μ|u
(s)
‑
σ
k
α
k|u
(s)μ
k
(s)]2ꢀꢀꢀ
(等式6)
[0042]
其中ovl
μ|u
(s)为包含在统计模型中的每一位点的错位的平均误差部分的未建模部分,且α
k|u
(s)为加权系数α
k
(s)的未建模部分。
[0043]
在下一步骤212处,错位数据分析器120针对在错位测量中使用的参数中的每一者从在步骤202处针对晶片生成的经测量错位数据ovl(λ,s)移除参数相依部分ε
k
(λ,s)及平均误差部分μ
k
(s),借此生成晶片的经改善参数稳定的经改善错位数据ovl0(s)。
[0044]
在本发明的优选实施例中,参数稳定的经改善错位数据ovl0(s)被用于调整在制作从其选择在步骤202中测量的晶片的希望相同的所述批晶片时使用的至少一个工具。
[0045]
优选地,在下一步骤214处,提供选自在步骤202处从其提供晶片的希望相同的所述批晶片的至少一个额外晶片,包含多个多层半导体装置。作为步骤214的部分,错位计量工具110使用多组测量参数集来在晶片的至少第一层与第二层之间的多个位点处测量错位,借此针对参数集中的每一者生成经测量错位数据。优选地,参数集包含多个光波长。
[0046]
接着,错位数据分析器120使用在步骤214处测量的至少一个额外值的参数相依部分ovl
ε
(λ,s)来定义至少一个额外晶片的加权系数α
k
(s)。一旦已知至少一个额外晶片的加权系数α
k
(s),错位数据分析器120便使用在步骤210处识别的一或多个变形特征矢量∈
k
(λ,s)来针对参数集中的每一者从在步骤214处针对至少一个额外晶片生成的经测量错位数据ovl(λ,s)识别及移除参数相依部分ε
k
(λ,s)及平均误差部分μ
k
(s),借此生成一或多个额外晶片的经改善参数稳定的经改善错位数据ovl0(s)。应了解,在步骤210处识别的一或多个变形特征矢量∈
k
(λ,s)包含参数相依部分ε
k
(λ,s)及平均误差部分μ
k
(s),如在上文关于等式2描述。
[0047]
在本发明的替代实施例中,在步骤202处,由错位计量工具110使用的测量参数集包含以下中的至少一者:错位测量中的焦点可变性、在错位测量中使用的数值孔径、在错位测量中使用的光的入射角度,及在错位测量中使用的光的偏振。在此类实施例中,优选地以与在上文关于图2描述的分析类似的方式分析依据变化的至少一个错位测量参数的错位测量数据变化,借此生成经改善参数稳定的经改善错位数据。
[0048]
所属领域的技术人员将了解,本发明不限于已在上文特别展示及描述的内容。本发明的范围包含在上文描述的各种特征的组合及子组合两者以及其修改,全部这些未在现有技术中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
