1.本实用新型涉及电子设备技术领域,尤其涉及一种学习机。
背景技术:
2.随着电子设备的发展,越来越多的人使用学习机进行课程学习,在使用学习机进行人机交互时,往往需要将手写的笔迹输入到学习机中。
3.现有的学习机往往会附带一个手写板,在手写板中设置传感器,用户使用特定的手写笔在手写板上写字,手写板中的传感器感知到笔尖的位置,在学习机中形成笔迹图像,但是这种带有手写板的学习机需要装配带有传感器的写字板,会占用学习机的空间,使得学习机的体积和重量较大,且手写板反馈的笔迹无法体现粗细,和真实笔迹存在差异,对笔迹的识别不准确。
技术实现要素:
4.本实用新型实施例提供一种学习机,用以解决现有技术中带有手写板的学习机体积和重量较大,且手写板反馈的笔迹无法体现粗细,和真实笔迹存在差异,对笔迹的识别不准确的缺陷,实现降低学习机的体积和重量,简化生产工序,降低成本,且对笔迹的识别更加准确。
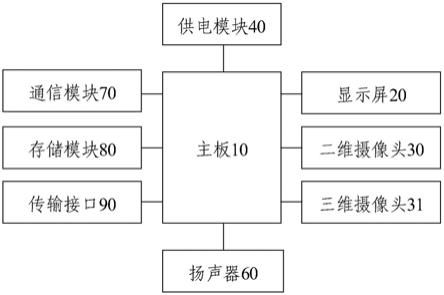
5.本实用新型实施例提供一种学习机,所述学习机包括:壳体;二维摄像头,所述二维摄像头设于所述壳体,用于拍摄手写笔迹的二维信息;三维摄像头,所述三维摄像头设于所述壳体,用于拍摄手写笔迹的深度信息;显示屏,所述显示屏设于所述壳体;主板,所述主板设于所述壳体内,所述二维摄像头、所述三维摄像头和所述显示屏均与所述主板电连接,所述主板设置为控制所述二维摄像头和所述三维摄像头拍摄手写笔迹,并处理所述二维信息和所述深度信息以得到笔迹图像,并控制所述显示屏显示所述笔迹图像;供电模块,所述供电模块设于所述壳体内,所述供电模块与所述主板电连接。
6.根据本实用新型一个实施例的学习机,所述三维摄像头为tof摄像头或3d结构光摄像头,所述二维摄像头为rgb摄像头。
7.根据本实用新型一个实施例的学习机,所述二维摄像头的拍摄方向和所述显示屏的法线方向呈锐角,所述三维摄像头的拍摄方向和所述显示屏的法线方向呈锐角。
8.根据本实用新型一个实施例的学习机,所述壳体具有滑槽和摄像支架,所述二维摄像头和所述三维摄像头均设于所述摄像支架,所述摄像支架滑动安装于所述滑槽,且设置为适于在滑动路径上的第一位置和第二位置固定,所述第一位置位于壳体内,所述第二位置位于壳体外。
9.根据本实用新型一个实施例的学习机,所述学习机还包括:驱动模块,所述驱动模块与所述主板电连接,所述驱动模块的输出端与所述摄像支架动力耦合连接。
10.根据本实用新型一个实施例的学习机,所述学习机还包括:柔性排线,所述二维摄像头和所述三维摄像头均通过所述柔性排线和所述主板电连接。
11.根据本实用新型一个实施例的学习机,所述二维摄像头的光轴中心和所述三维摄像头的光轴中心重合。
12.根据本实用新型一个实施例的学习机,所述主板集成有isp处理器,所述isp处理器用于对所述二维摄像头拍摄到的所述二维图像和所述三维摄像头拍摄到的所述深度图像进行处理,得到所述笔迹图像。
13.根据本实用新型一个实施例的学习机,所述三维摄像头包括:发射模块,所述发射模块用于发射出红外脉冲光线;接收模块,所述接收模块用于接收经过目标反射所述红外脉冲光线形成的红外反射光线。
14.根据本实用新型一个实施例的学习机,所述学习机还包括:判别模块,所述判别模块与所述主板电连接,所述主板设置为控制所述三维摄像头获取头部姿态信息,并控制所述判别模块基于所述头部姿态信息得到用户交互特征。
15.本实用新型实施例提供的学习机,通过设置二维摄像头和三维摄像头共同采集笔迹图像,能够降低学习机的体积和重量,简化生产工序,降低成本,且对笔迹的识别更加准确。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本实用新型实施例提供的一种学习机的结构示意图;
18.图2是本实用新型实施例提供的一种学习机的摄像支架安装示意图;
19.图3是本实用新型实施例提供的一种学习机的成像原理图;
20.图4是本实用新型实施例提供的一种学习机的电路连接示意图。
21.附图标记:
22.主板10,显示屏20,二维摄像头30,三维摄像头31,发射模块33,接收模块34,供电模块40,摄像支架50,驱动模块51,柔性排线52,扬声器60,通信模块70,存储模块80,传输接口90。
具体实施方式
23.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型实施例的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特
点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
25.下面结合图1
‑
图4描述本实用新型实施例的学习机。
26.如图1所示,本实用新型实施例提供一种学习机,所述学习机包括:壳体(图中未示出)、二维摄像头30、三维摄像头31、显示屏20、主板10和供电模块40。
27.其中,二维摄像头30、三维摄像头31、显示屏20、主板10和供电模块40均安装于壳体,主板10和供电模块40可以设于壳体内部,显示屏20可以安装在壳体的安装面上,二维摄像头30和三维摄像头31可以并排安装,二维摄像头30的镜头和三维摄像头31的镜头从壳体中向外露出。
28.二维摄像头30用于拍摄手写笔迹的二维图像,在获取到二维图像后,可以得到二维信息,二维信息主要包括手写笔迹的颜色和二维形状。
29.可以理解的是,用户在使用学习机时,有一些使用场景下单靠打字并不能实现目的,还需要用户手写,比如需要手写练习绘图或者练习书法时,需要将手写笔迹录入到学习机中。
30.用户可以使用签字笔、圆珠笔或者铅笔等能够在纸上留下笔迹的笔在被扫描介质上书写,调整学习机的姿势,使得二维摄像头30能够拍摄到用户在被扫描介质上显示的手写笔迹,形成二维图像。
31.三维摄像头31用于拍摄手写笔迹的深度图像,可以基于深度图像获取手写笔迹的深度信息。
32.深度图像指的是划分从三维摄像头到场景中各点的距离作为像素值的图像,深度信息就是深度图像所包含的各个点的距离所形成的多个像素点对应的距离值。
33.深度信息仅供坐标转换可以计算为点云数据,有规则及必要信息的点云数据也可以反算为深度信息。
34.深度数据流所提供的图像帧中,每一个像素点代表的是在深度感应器的视野中,该特定的(x,y)坐标处物体到离三维摄像头平面最近的物体到该平面的距离。目前,深度图像的获取方法有激光雷达深度成像法、计算机立体视觉成像、坐标测量机法、莫尔条纹法和结构光法等。
35.深度信息往往用于测距,当三维摄像头拍摄到目标物体的深度图像时,可以对深度图像进行处理,得到目标物体上各个点与三维摄像头的距离。
36.实践中可以采用主动测距和被动测距的方式来得到深度图像,被动测距的方式中被动测距传感中最常用的方法是双目立体视觉,该方法通过两个相隔一定距离的摄像机同时获取同一场景的两幅图像,通过立体匹配算法找到两幅图像中对应的像素点,随后根据三角原理计算出时差信息,而视差信息通过转换可用于表征场景中物体的深度信息。基于立体匹配算法,还可通过拍摄同一场景下不同角度的一组图像来获得该场景的深度图像。除此之外,场景深度信息还可以通过对图像的光度特征和明暗特征等特征进行分析间接估算得到。
37.主动测距的方法中主动测距传感相比较于被动测距传感最明显的特征是设备本身需要发射能量来完成深度信息的采集。这也就保证了深度图像的获取独立于二维彩色图
像的获取。
38.现有的学习机往往会附带一个手写板,在手写板中设置传感器,用户使用特定的手写笔在手写板上写字,手写板中的传感器感知到笔尖的位置,在学习机中形成笔迹图像,但是这种带有手写板的学习机需要装配带有传感器的写字板,会占用学习机的空间,使得学习机的体积和重量较大,且手写板反馈的笔迹无法体现粗细,和真实笔迹存在差异,对笔迹的识别不准确。
39.为了解决现有技术这种学习机附带手写板所带来的技术缺陷,相关技术可能会利用学习机上的二维摄像头来拍摄手写笔迹,然而仅用二维摄像头拍摄的二维图像是被扫描介质上的笔迹在二维摄像头的成像面形成的二维投影图像,由于用户在使用学习机时,学习机的显示屏往往朝向用户的脸部,二维摄像头通常还用于拍摄用户的脸部图像,因此很难让二维摄像头正对着被扫描介质,二维摄像头拍摄到的二维图像中的笔迹会因为二维摄像头和被扫描介质所呈的角度影响,呈现出一定的畸变,这种投影图像上显示的内容和真实笔迹存在差异,仅依靠二维摄像头拍摄手写笔迹,呈现出来的笔迹图像存在畸变,不能准确反映真实笔迹。
40.本实用新型实施例在二维摄像头30的基础上,还设置有三维摄像头31,三维摄像头31和二维摄像头30的成像原理不相同,三维摄像头31能够拍摄到目标的深度图像,在拍摄被扫描介质上的手写笔迹时,能够生成各个像素点的距离值,像素点的距离值为被扫描介质上的不同点到三维摄像头31的距离,这样形成的深度图像就不是投影图像。
41.二维摄像头30、三维摄像头31、显示屏20和供电模块40均与主板10电连接。
42.显示屏20可以包括lcd屏幕、led屏幕和oled屏幕中的一种。
43.主板10设置为控制二维摄像头30和三维摄像头31拍摄手写笔迹,当用户对学习机给出拍照指令时,主板10可以控制二维摄像头30和三维摄像头31开启,使得二维摄像头30和三维摄像头31同时开始拍摄手写笔迹,二维摄像头30生成二维图像,三维摄像头31生成深度图像。
44.主板10处理二维图像和深度图像得到笔迹图像,主板10能够将三维摄像头31拍摄到的深度图像和二维摄像头30拍摄到的二维图像进行融合,形成深度点云数据,深度点云数据包含了笔迹的颜色信息和距离信息,就能够利用深度图像中各个像素点的距离值,对二维图像中的各个像素点的内容进行修正,从而形成笔迹图像,这种笔迹图像是根据深度点云数据生成的,相对于简单的二维投影来说,能够避免笔迹的畸变,避免失真,更符合手写笔迹的真实情况。
45.主板10还可以从笔迹图像中识别出文字内容,可以将识别出来的文字文本输入到应用软件中。比如,主板10可以采用ocr(optical character recognition,光学字符识别)来检查笔迹图像中的字符,通过检测暗、亮的模式确定其形状,然后用字符识别方法将形状翻译成计算机文字。
46.可以针对印刷体字符,采用光学的方式将笔迹图像中的文字转换成为黑白点阵的图像文件,并通过识别软件将图像中的文字转换成文本格式,供文字处理软件进一步编辑加工的技术
47.在一些实施例中,主板10内部可以集成有isp处理器,isp处理器用于对二维摄像头30拍摄到的二维图像和三维摄像头31拍摄到的深度图像进行处理,可以先对二维图像和
深度图像进行融合,在进行自动对焦和自动色调映射等操作,当然isp处理器还可以具有其他功能,比如扣暗电流(去掉底电流噪声)、线性化(解决数据非线性问题)、shading(解决镜头带来的亮度衰减与颜色变化)、去坏点(去掉坏点数据)、去噪(去除噪声)、自动白平衡、自动对焦、自动曝光、旋转、锐化、缩放、色彩空间转换以及颜色增强等。
48.当然主板10还可以通过集成其他处理器,比如dsp处理器,来实现对二维摄像头30拍摄到的二维图像和三维摄像头31拍摄到的深度图像进行处理,本实用新型实施例对此不作具体限定。
49.这样就能够使得得到的笔迹图像去除了其他无关参数,保留了更多的笔迹特征,得到的笔迹图像更符合真实手写笔迹的实际情况。
50.主板10能够控制显示屏20显示笔迹图像,当主板10获取到了笔迹图像,就根据学习机上的应用程序的实际需求,将笔迹图像显示到显示屏20上,将笔迹图像呈现给用户。
51.当然这种笔迹图像也可以是实时更新的,主板10能够通过二维摄像头30和三维摄像头31实时拍摄手写笔的笔头位置变化,也就是被扫描介质上的笔迹变化,能够根据笔迹的运动轨迹来控制显示光标的移动轨迹,可以利用显示光标在显示屏20上进行画图,也可以通过移动显示光标来点击显示屏20上的内容,能够控制学习机,实现人机交互。
52.供电模块40用于给主板10供电,进而能够通过主板10给二维摄像头30、三维摄像头31和显示屏20供电,供电模块40可以包括可拆卸式电池,在电量使用完毕时可以进行快捷更换,供电模块40还可包括外接电线,可以直接通过外接电源给学习机供电。
53.本实用新型实施例由于不需要设置手写板,就不需要设置手写板接口,可以去除现有的具有手写板的学习机上的pogo pin接口,这样使得学习机更加简洁,更加美观。
54.在一些实施例中,所述学习机还包括:判别模块。
55.判别模块与主板电连接,主板设置为控制三维摄像头获取头部姿态信息,并控制判别模块基于头部姿态信息得到用户交互特征。
56.可以理解的是,由于设置了三维摄像头,还可以利用三维摄像头拍摄用户的头部图像,经过主板处理得到头部姿态信息,判别模块可以根据头部姿态信息输出用户交互特征。
57.比如:判别模块可以进行人脸识别,识别出使用者的身份信息,以根据身份信息推送对应的课程。判别模块也可以用来解锁,判别模块还可以根据三维摄像头识别到用户的坐姿,来提醒用户采用规范的姿势,判别模块还可以根据用户的点头或者摇头姿势,来与远程端的用户进行互动,判别模块可以捕捉到用户对知识点的理解程度,更好地调整课程。
58.本实用新型实施例提供的学习机,通过设置二维摄像头30和三维摄像头31共同采集笔迹图像,能够降低学习机的体积和重量,简化生产工序,降低成本,且对笔迹的识别更加准确。
59.在一些实施例中,二维摄像头30的拍摄方向和显示屏20的法线方向呈锐角,三维摄像头31的拍摄方向和显示屏20的法线方向呈锐角。
60.也就是说,二维摄像头30和三维摄像头31并排放置,两者的拍摄方向都和显示屏20的法线方向呈锐角,当将学习机支撑放置于桌面时,显示屏20朝向人脸,被扫描介质搁置于学习机显示屏20前的桌面上,二维摄像头30和三维摄像头31的拍摄方向大致与被扫描介质垂直,二维摄像头30的拍摄范围和三维摄像头31的拍摄范围均能够覆盖被扫描介质。
61.比如,二维摄像头30和二维摄像头31可以并排设置在摄像支架50上,摄像支架50可以具有与显示屏20的显示面呈锐角的安装面,二维摄像头30和二维摄像头31均安装在摄像支架50内部,并且从摄像支架50的安装面上露出镜头,这样就能够使得二维摄像头30的拍摄范围和三维摄像头31的拍摄范围均能够覆盖被扫描介质。
62.如图2所示,在一些实施例中,壳体具有滑槽(图中未示出)和摄像支架50。
63.二维摄像头30和三维摄像头31均设于摄像支架50,摄像支架50滑动安装于滑槽,摄像支架50可以带动二维摄像头30和三维摄像头31在滑槽中滑动。
64.摄像支架50设置为适于在滑动路径上的第一位置和第二位置固定,第一位置位于壳体内,第二位置位于壳体外,摄像支架50可以沿着滑动路径从壳体内伸出到壳体外。
65.比如,可以将摄像支架50弹性安装于滑槽,当用户手动按压摄像支架50时,摄像支架50从滑槽中弹出一定位移,固定到第二位置,当用户再次手动按压摄像支架50时,摄像支架50从滑槽中缩回一定位移,固定到第一位置。
66.通过设置可伸缩的摄像支架50,能够在不使用摄像功能时,将二维摄像头30和三维摄像头31缩回壳体内,对二维摄像头30和三维摄像头31起到保护作用,能够减小学习机的整体体积,在需要使用摄像功能时,将二维摄像头30和三维摄像头31从壳体中伸出,也能扩大成像视野,避免被壳体的形状位置所局限。
67.如图2所示,在一些实施例中,学习机还包括:驱动模块51。
68.驱动模块51与主板10电连接,驱动模块51的输出端与摄像支架50动力耦合连接。
69.驱动模块51可以为电机、气泵或者液压泵,当驱动模块51为电机时,可以选择步进电机、舵机或者伺服电机。驱动模块51用于驱动摄像支架50沿着滑槽实现滑动,当驱动模块51为气泵或者液压泵时,可以直接将气泵或者液压泵的输出端与摄像支架50动力耦合连接,带动摄像支架50做直线运动。当驱动模块51为电机时,可以采用曲柄连杆机构将电机的输出端和摄像支架50动力耦合连接,这样就能够将电机输出端的旋转运动转换为摄像支架50的直线运动。
70.当然还可以具有驱动开关,驱动开关与主板10电连接,驱动开关用于控制驱动模块51的工作状态,主板10可以设置为根据驱动开关的触发情况,来确定驱动模块51的工作状态,用户可以根据实际需要来启动驱动模块51。
71.当然,主板10也可以设置为根据应用程序的实际需求,来自动开启驱动模块51,自动控制摄像支架50的伸出和缩回。
72.如图2所示,在一些实施例中,学习机还包括:柔性排线52,二维摄像头30和三维摄像头31均通过柔性排线52和主板10电连接,通过设置柔性排线52进行电连接,柔性排线52能够依靠自身形变配合摄像支架50的伸缩位移,能够确保二维摄像头30和三维摄像头31的供电和数据传输的稳定性。
73.在一些实施例中,二维摄像头30的光轴中心和三维摄像头31的光轴中心重合,这样就能够使得二维摄像头30的视场和三维摄像头31的视场重叠,能够便于将二维摄像头30拍摄到的二维图像和三维摄像头31拍摄的深度图像能够快速融合,且像素点能够精确匹配,避免遗漏手写笔迹的某些特征,也能避免发生重影,提升笔迹图像的准确性。
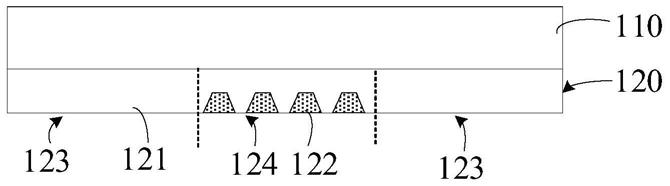
74.如图2和图3所示,在一些实施例中,三维摄像头31包括:发射模块33和接收模块34。
75.其中,发射模块33用于发射出红外脉冲光线;接收模块34用于接收经过目标反射红外脉冲光线形成的红外反射光线。
76.可以理解的是,还可以包括控制模块,发射模块33可以内置于主板10中。
77.发射模块33和接收模块34均与控制模块电连接,控制模块用于控制发射模块33发射光信号到被扫描介质,以及用于控制接收模块34接收被扫描介质的反射光信号,控制模块还基于发射光信号和反射光信号进行计算处理,得到被扫描介质上的内容到三维摄像头31的距离。
78.如图4所示,在一些实施例中,三维摄像头31为tof摄像头或3d结构光摄像头,二维摄像头30为rgb摄像头。
79.tof(time of flight,飞行时间)摄像头的成像原理为由一组人眼看不到的红外光(激光脉冲)向外发射,遇到物体后反射,反射到摄像头结束,计算从发射到反射回摄像头的时间差或相位差,并将数据收集起来,形成一组距离深度数据,从而得到一个立体的3d模型的成像技术。
80.3d结构光摄像头是利用结构光这种特殊的光源进行成像,结构光通常分为三种:离散光斑、条形光和编码结构光,工作时,经过特定编码的光斑从发射模块33投射到目标物体上,目标物体反射红外脉冲光线,接收模块34接收红外反射光线,3d结构光摄像头可以根据光斑的畸变情况,计算目标物体各点距离3d结构光摄像头的镜头平面的距离。
81.rgb(red green blue,红绿蓝)摄像头的成像原理为基于光的三原色红绿蓝的发光组合来形成各种颜色,从而根据物体反射的可见光来形成二维彩色图像。
82.3d结构光摄像头相对于tof摄像头,精度更高,精度可以达到0.01mm以内,能够采集到的精确的笔迹信息输出,由于结构光主动投射编码光,因而非常适合在光照不足(甚至无光)、缺乏纹理的场景使用。
83.表1为tof摄像头、双rgb摄像头组合以及3d结构光摄像头的性能参数比照。
84.表1
[0085][0086]
当选择tof摄像头作为三维摄像头31时,控制模块能够基于发射光信号和反射光信号进行计算处理,用于计算光信号在空间中的飞行时间。
[0087]
比如,发射模块33和接收模块34之间的距离可以为几毫米左右,远小于人脸距离tof摄像头的距离,因此,通过控制模块对发射光信号和反射光信号的时间差δt进行计算,可以根据光传播速度不变的原理,由公式(c
·
δt/2)就可以获取人脸到tof摄像头的距离信息,其中,c表示光速。
[0088]
当选择tof摄像头作为三维摄像头31时,发射模块33可以包括顺次连接的光线扩散器、基座和发射器。光线扩散器可以为diffuser光线扩散器,基座可以为housing基座,发射器可以为vcsel发射器。
[0089]
可以理解的是,发射器为近红外波段,由于在太阳光谱中,近红外波段的比例相较于可见光要低得多,发射器选择的波长可以为850nm或者940nm。
[0090]
光线扩散器可以包括漫射器,漫射器用于对发射器发射出的光束进行整形以形成泛光照明,以在空间中形成较佳的面照明。光线扩散器可以包括衍射器,衍射器用于对发射器发射出的光速进行衍射以形成斑点光束,比如规则排列的斑点光束,与泛光照明相比,斑点光速所计算出的飞行时间信噪比更高。基座用于连接光线扩散器和发射器,能够起到挡光作用,能够最大程度降低太阳光的干扰。接收模块34包括顺次连接的光学透镜、滤光片和成像传感器。
[0091]
成像传感器是一种专门用于光飞行时间测量的图像传感器,比如可以为cmos(互补金属氧化物半导体)、apd(雪崩光电二极管)和spad(单光子雪崩光电二极管)等图像传感器,成像传感器的像素可以是单点、线阵或者面阵等形式。成像传感器内部包含采集窗口,反射光通过光学透镜和滤光片后成像到成像传感器,在通过采集窗口对反射光进行采集和解调得到时间差,进而得到手写笔迹的距离值。
[0092]
光学透镜用于收集来自人脸反射的反射光信号,滤光片可以选择与发射器发射的波长相匹配的窄带滤光片,用于抑制其余波段的背景光噪声。
[0093]
如图1所示,在一些实施例中,学习机还包括:通信模块70、扬声器60、存储模块80和传输接口90,通信模块70、扬声器60、存储模块80和传输接口90均与主板10电连接,传输接口90用于供电和/或传输数据。
[0094]
通信模块70可以包括wifi模块、蓝牙模块、4g模块和5g模块中的至少一种。
[0095]
存储模块80可以包括emcp和tf
‑
card。
[0096]
主板10上可以设有soc(系统级芯片)。
[0097]
如图4所示,学习机还可以包括:lcd interface,lcd interface可以通过backlight diver和soc电连接,soc可以采用脉冲宽度调制(pulse width modulation,pwm)与backlight diver传输数据。
[0098]
lcd interface同时采用mipi dsi 4lane协议和soc连接。
[0099]
学习机还可以包括:main ant,main ant和soc电连接。
[0100]
学习机还可以包括:gps模块、bt(蓝牙)模块和wifi模块,gps模块、bt(蓝牙)模块和wifi模块均与soc电连接。
[0101]
学习机还可以包括:tf卡槽和sim卡槽,tf卡槽和sim卡槽均通过sdio red river bh201ln与soc电连接,tf卡槽采用sdio(安全数字输入输出)协议,sim卡槽采用sim协议。
[0102]
如图4所示,电源模块可以包括:pmic(power management ic,电源管理集成电路)、switch模块、ovp ic(过压过流保护集成电路)、type c interface、charge ic和电池,
其中,pmic可以通过usb协议、ldo协议和clk协议与soc电连接,switch模块可以通过usb协议和hp_l/r与soc电连接,switch模块与type c interface电连接,type c interface和ovp ic电连接,ovp i和charge ic电连接,ovp ic向charge ic传输5v
‑
12v的电压,charge ic向ovp ic传输5v的电压,charge ic通过vsys协议和pmic电连接,charge ic和电池电连接。
[0103]
学习机还可以包括:emmc(embedded multi media card),emmc和soc电连接。
[0104]
学习机还可以包括:lpddr4,lpddr4和soc采用lpddr4x协议电连接。
[0105]
3d结构光摄像头可以采用i2c协议和soc电连接。
[0106]
学习机还可以包括:main 8m camera interface和front 8m camera interface,main 8m camera interface通过mipi csi1 4lane以及i2c协议和soc电连接,front 8m camera interface通过mipi csi0 2lane以及i2c协议和soc电连接。
[0107]
学习机还可以包括:flash led,flash led和soc通过i2c协议和soc电连接。
[0108]
学习机还可以包括:spkl(左扬声器)和spkr(右扬声器),spkl和spkr均通过smart pa和soc电连接,smart pa可以采用i2s和i2c和soc电连接。
[0109]
学习机还可以包括:mic array(麦克风阵列),mic array可以采用pdm协议和soc电连接。
[0110]
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
[0111]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
[0112]
最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。