1.本发明涉及一种具有全息成像光学器件的激光雷达系统。本发明还涉及一种用于这种激光雷达系统的全息成像光学器件。
背景技术:
2.激光雷达系统用于求取观察区域的3d数据。这种系统包括用于产生确定波长的光辐射的至少一个光发射器,其通常以激光器的形式构造,并且包括用于检测相应波长的光辐射的至少一个探测器。在系统的运行中,由发射器发射的并在观察区域中的对象上反射的或散射的光辐射是由探测器检测的。通过测量在所扫描的对象上反射回来的光辐射的传播时间,可以计算出所涉及的对象的距离。典型的激光雷达系统在观察区域中执行大量的单个测量,在这些单个测量中,分别仅检测小的空间区域或空间角度。然后,单个测量的整体产生3d点云,这使得能够得出关于相应观察区域中对象的空间分布的结论。如此,例如,wo 11146523 a2公开一种相应的激光雷达系统,其中,多个光发射器与相同数量的探测器一起布置在共同的旋转平台上。在此,每个光发射器都分别分配有探测器,其中,由透镜和反射镜组成的光学设备确保,每个探测器都观察到相关光发射器进行发射的空间角度。在这个组合(konstellation)中,每个发射器/探测器对形成一个单独的激光测距仪,其中,每个单个的发射器/探测器对关于整个设备的旋转轴在不同(andere)方向上观察。然后,该布置的旋转运动使得能够实现3d点云的扫描,其中,每个单个的发射器/探测器对扫描观察区域的不同平面。
3.为了实现尽可能大的探测范围,激光雷达系统中的成像光学系统通常如此设计,使得其看到尽可能少的环境光。否则,从对象反射回来的激光将很难与辐射背景区分开来,尤其是在阳光直射的情况下。这是通过如下选择:光谱选择,在该光谱选择中,例如借助带通滤波器对入射的光进行过滤;时间选择,在该时间选择中,在窄的时间窗口中进行探测;以及几何选择,在该几何选择中,仅观察围绕所发射射束的窄视场。然而,尤其几何选择要求,在传统的光学器件设计中,每个扫描平面都需要自己的探测器。仅如此才可以实现,每个探测器仅看到非常窄的角度范围。然而,为此所需的大量探测器具有如下缺点:由此显著增加系统的复杂性和成本。
技术实现要素:
4.因此,本发明的任务是减少检测3d点云所需的探测器的数量。该任务通过根据权利要求1的激光雷达系统解决。本发明的其他有利实施方式在从属权利要求中进行说明。
5.根据本发明,设置一种用于检测观察区域内的对象的激光雷达系统,该激光雷达系统包括照射装置,该照射装置用于以多个分别具有不同波长的光辐射照射观察区域,其中,在时间上依次地分别以不同的光辐射照射观察区域的当前由激光雷达系统的探测区域检测到的多个单独的空间区域。该激光雷达系统还包括用于探测从观察区域中的对象反射回来的光辐射的探测装置,该探测装置包括个别地(individuell)分配给相应探测区域的
至少一个探测布置,该探测布置由用于探测来自当前由探测区域检测到的空间区域的光辐射的探测器和用于将相应光辐射聚焦到探测器上的全息成像光学器件组成。全息光学元件在此构造为,针对聚焦到探测器上的光辐射中的每个光辐射,将来自仅以下空间区域的相应光辐射聚焦到探测器上:该空间区域个别地分配给相应光辐射并且当前由探测区域检测到。全息成像光学器件使得能够借助仅一个探测器分别对两个或多个扫描平面进行寻址,并且在每个测量过程中仍然将视场限缩到仅一个如此组合的观察方向上。与传统的扫描式激光雷达系统相比,借助在此提出的布置因此可以以较少数量的探测器扫描相同数量的扫描平面。较少数量的探测器在此使得能够实现明显不那么复杂的结构。此外,较少数量的探测器还伴随着这种激光雷达系统的制造成本的降低。如果由于所使用的波长而不能使用基于硅的探测器元件,而是例如需要明显更昂贵的ingaas探测器,则这是特别有利的。作为使用较少数量探测器的替代方案,可以借助相同数量的探测器扫描更大数量的扫描平面。由此可以增加激光雷达系统的垂直分辨率。
6.在一种实施方式中设置,全息成像光学器件包括至少一个全息光学元件。在此,根据本发明,常规成像光学器件通过由一个或多个全息光学元件组成的全息成像光学器件来取代或补充。与经典的折射光学器件不同,全息光学元件仅针对确定的波长和空间方向良好地起作用,并且关于该特性仅具有非常有限的容差。因此,在激光雷达系统中使用全息成像光学器件具有如下优点:既不将来自不同于所设置的空间方向的光引导到探测器上,也不将具有不同于所设置的波长的光引导到探测器上。因为全息成像光学器件由于其波长选择性而本质上表示带通滤波器,因此在理想情况下可以省去在传统激光雷达系统中所需的单独的带通滤波器。
7.在另一实施方式中设置,全息光学元件包括多个全息图,这些全息图构造为分别将分别来自当前由相应探测区域检测到的空间区域中的不同空间区域的光辐射中的一个光辐射聚焦到探测器上。多个全息图的使用使得能够实现全息光学元件的特别简单且成本有利的制造。此外,通过使用多个全息图还改善全息光学元件的波长选择性。
8.在另一实施方式中设置,全息图中的至少一个以透射几何中的体积全息图的形式构造。这种构型使得能够实现特别简单且成本有利的结构。
9.在另一实施方式中设置,照射装置包括具有多个光发射器的光发射器布置,这些光发射器分别发射光辐射中的一个光辐射。该布置使得能够相互独立地产生不同光辐射。
10.在另一实施方式中设置,各个光发射器分别分配有由至少一个衍射光学元件和/或全息光学元件组成的无源光学器件。在此,无源光学器件构造为将由相应光发射器所发射的光辐射分成至少两个部分射束,这些部分射束分别照射观察区域的不同空间区域。因此,这种无源光学器件使得能够借助各个光发射器同时照射多个空间区域,这些空间区域分别分配给不同的探测区域。由此,可以减少所使用的光发射器的数量,并且因此可以减少制造这种照射装置的开销和成本。
11.在另一实施方式中设置,探测装置包括多个在空间上彼此偏移地布置的探测布置,该探测布置分别由探测器和分别个别地分配给这些探测布置的全息光学元件组成。在此,探测布置的探测区域分别检测观察区域的不同空间区域。以这种方式形成相对较大的视场,这使得激光雷达系统能够快速地检测整个观察区域。
12.在另一实施方式中设置,探测装置的探测布置配置在共同的成像光学器件的焦平
面中。这种成像光学器件扩大光学成像系统的仪器(apparatur)。由此使得能够将从确定空间方向入射到成像光学器件上的光辐射的较大部分成像到分配给相应光辐射或相应空间方向的探测布置上。通过待探测光束的因此总体上增加的光强度也改善信噪比并且因此改善探测器的测量准确度。
13.在另一实施方式中设置,观察区域的当前由探测装置的探测器检测到的所有空间区域限定激光雷达系统的当前视场。激光雷达系统在此构造为借助当前视场沿着预给定扫描方向的扫描运动来扫描整个观察区域。通过扫描运动,使得能够借助相对较少数量的探测器来扫描相对较大的观察区域。由此,可以以更低的开销和明显更加成本有利地制造激光雷达系统。
14.在另一实施方式中设置,至少一个探测布置分配有光学带通滤波器,该光学带通滤波器仅允许个别地分配给相应探测布置的光辐射通过。借助带通滤波器能够提高全息成像光学器件的波长选择性,这尤其伴随有明显更好的信噪比。
15.此外,设置一种用于激光雷达系统的全息成像光学器件,该全息成像光学器件包括具有多个全息图的全息光学元件。全息图在此分别构造为,分别将分别来自个别地分配给相应光辐射的空间区域的、个别地分配给相应全息图的光辐射聚焦到个别地分配给相应全息光学元件的探测器上。
附图说明
16.下面基于附图更详细地描述本发明。在此示出:
17.图1示出在扫描观察区域时的扫描式激光雷达系统;
18.图2示意性示出传统激光雷达系统的探测装置;
19.图3示意性示出具有由全息光学元件组成的全息成像光学器件的激光雷达系统的探测装置;
20.图4示出图3中的、包括多个全息图的全息光学元件的详细视图;
21.图5示意性示出具有根据图3的多个探测布置和一个共同成像光学器件的扩展探测装置;
22.图6示出具有由多个衍射光学元件组成的衍射光学器件的激光雷达系统的照射装置;
23.图7示意性示出具有减少数量的探测布置的激光雷达系统的结构;并且
24.图8示意性示出图7中的布置的修改,其中,借助多个衍射光学元件减少激光雷达系统的光发射器的数量。
具体实施方式
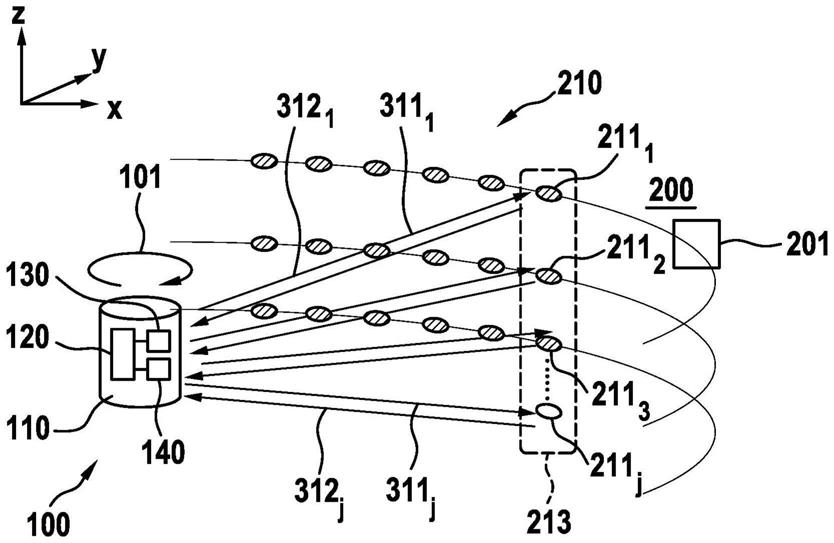
25.图1示意性示出扫描式激光雷达系统100的原理,其借助光束311
j
扫描其紧邻的周围环境200的限定观察区域210。激光雷达系统100在此包括布置在旋转壳体110中的照射装置130,照射装置具有用于产生一个或多个光辐射的多个光发射器的,所述一个或多个光辐射以分离的光束或激光束311
j
的形式在不同的空间方向上发射。光束311
j
中的每个光束在此分别照射个别地分配给相应光束311
j
的空间区域211
j
,其中,在本示例中,在确定时刻由照射装置130同时检测的空间区域211
j
垂直地彼此上下地布置,从而激光雷达系统100的当
前视场的213形成或多或少连续的条带。通过扫描运动101,壳体110和布置在其中的照射装置130沿着预给定的扫描方向摆动,使得视场213在此在整个扫描周期期间检测激光雷达系统100的当前观察区域210的所有空间区域211
j
。
26.在测量过程期间,由激光雷达系统100发射的光束311
j
照射到周围环境200中的对象201上并由这些对象反射回至激光雷达系统100,在那里借助于探测装置140探测这些光束。基于所接收的光束312
j
的传播时间,激光雷达系统100的控制装置120为这些光束311
j
、312
j
中的每个光束求取至由相应光束照射的对象201的距离。在完整的扫描周期之后,激光雷达系统100提供点云作为测量结果,该点云代表对象201在激光雷达系统100的观察区域210内的相对布置。
27.从当前视场213的不同空间区域211
j
反射回来的光束312
j
的探测在此个别地进行。因此,在传统的激光雷达系统100中,每个视角分别个别地分配有自己的探测器142
j
。为此,图2示出传统激光雷达系统100的典型探测装置140的相应详细视图。在此,探测装置140包括成像光学器件146和探测器1421至142
m
的组141,这些探测器以列的形式彼此上下地布置在成像光学器件146的焦平面147中。成像光学器件146在此将来自不同空间方向的光聚焦到其焦平面147中的不同点上,其中,将从当前视场213的空间区域2111至211
j
之一反射回来的光束312
j
中的每个光束成像到个别地分配给相应空间区域2111至211
j
的探测器1421至142
j
上。因此,激光雷达系统100具有数量总共为j的观察方向214
j
。
28.激光雷达系统100使用例如雪崩二极管(apd)或单光子雪崩二极管(spad)作为探测器1421至142
j
。在此,二极管可以单独地存在或作为单片阵列的一部分存在。此外,将整个阵列或spad阵列的一部分互连在一起以形成单个探测器(“solid
‑
state photomultiplier,固态光电倍增管”)也可能是有利的。在此象征性地示为单个透镜的成像光学器件146可以根据应用由单个光学部件(例如透镜或凹面镜)组成,或由多个这种部件的布置(例如三重透镜和(lens triplet)反转镜(umkehrspiegel))组成。
29.为了在这种扫描式激光雷达系统中在分辨率保持相同的情况下能够减少探测器的数量,根据本发明,通过具有全息元件的全息成像光学器件145取代或补充基于透镜和/或反射镜的传统成像光学器件,该全息成像光学器件针对m个探测器1421至142
m
中的每个探测器产生多个观察方向。为此,图3示意性示出激光雷达系统100的相应修改的探测装置140的探测布置141,其包括探测器142和全息成像光学器件145,该全息成像光学器件具有分配给探测器142的全息光学元件143。由全息图形成的全息光学元件143在此构造为,将来自不同方向的、分别具有不同波长的多个光辐射3101至3103聚焦到探测器142上。在本示例中,在此总共示出三个不同的光辐射3101至3103,这些光辐射以从分别不同空间方向反射回来的光束3121至3123的形式照射并且由全息光学元件143成像到探测器142上。全息图的一个基本特性是,与经典折射光学不同,仅针对确定的波长和空间方向良好地起作用,并且关于这些特性仅具有有限的容差。因此,将全息图用于激光雷达系统中的应用中具有如下优点:既不将来自不同于所设置的空间方向的光引导到探测器142上,也不将具有不同于所设置的波长的光引导到探测器142上。由于这种波长选择性,例如在理想情况下不需要附加的带通滤波器,然而根据应用仍然可能是有利的。
30.全息光学器件145由至少一个全息光学元件143组成,其包含n个全息图1441至144
n
,其中,n≥2。这n个全息图1441至144n中的每个的特征在于,其针对相应数量的n个波长
λ1至λ
n
分别将确定的射束聚束(strahlenb
ü
ndel)聚焦到探测器142上。在波图像中表达:在全息图中,来自确定空间方向的理想平面波转换为以探测器位置为中心的球面波前。在本实施例中,分别具有不同波长的总共三个光辐射3101、3102、3103(其以三个光束3121、3122、3123的形式从不同的空间区域反射到探测器布置141上)由全息光学元件143成像到共同的探测器142上。图4示出图3中的全息光学元件143的详细视图。在此可以看出,全息光学元件143由彼此前后布置的总共三个全息图1441、1442、1443组成,这些全息图分别将来自个别地分配给相应光辐射3101、3102、3103的空间方向的、个别地分配给相应全息图的光辐射3101、3102、3103成像到探测器142上。因此,在本实施例中,全息光学元件143借助其三个全息图1441、1442、1443针对所分配的探测器142产生总共三个观察方向。在此,通过设置相应数量的全息图,如此产生的观察方向的数量可以匹配于相应的要求。通过将其他全息图添加至全息光学元件143,尤其能够相对简单地实现附加的观察方向。
31.然而,对组合在全息光学元件143中的全息图的数量进行限制可能是有意义的,因为随着每个附加的全息图,原则上也伴随着全息光学元件143的光学特性的劣化。如此,例如,由于多个全息图的多路复用,以下效率降低:各个全息图将具有相应波长的光以所述效率以所期望的那样进行聚束。同时,漫散射增加,从而不期望的波长λ的光辐射也越来越多地到达探测器。信号/背景比的随之而来的恶化可以证明尤其是在激光雷达应用中是特别关键的。
32.为了能够在没有这些缺点的情况下增加激光雷达系统的观察方向的数量,选择如下布置:在该布置中,将不同的观察方向分布在分别配备有自己的全息光学元件的多个探测器上。为此,图5示出具有总共m个探测布置1411至141
m
的组的相应探测装置140,所述探测布置分别由探测器1421至142
m
和个别地分配给这些探测器的全息光学元件1431至143
m
组成。以行的形式彼此上下布置的探测布置1411至141
m
分别具有不同的观察方向。在此,每个探测布置1411至141
m
分别包括一个全息光学元件1431至143
m
,该全息光学元件又包括用于波长λ1至λ
n
的总共n个全息图1441至144
n
,并且因此具有n个不同的观察方向。因此,整个探测布置1411至141
n
的组具有总共j个全息图以及观察方向,其中,j=m*n。在图5中所示出的组(其每个探测布置1411至141
n
分别具有m=3个全息图或观察方向)因此具有总共m*3个观察方向。在图5中所示出的实施方案与图4中的、具有n个全息图或观察方向的单个全息光学元件相比虽然具有更多的探测器,然而,具有如下优点:每个全息光学元件的全息图的更低数量导致更好的光学质量。此外,在此,波长λ1至λ
n
中的每个波长可以用于总共m个路径或者说观察方向,因为m个探测布置1411至141
n
中的每个探测布置针对每个波长λ1至λ
n
仅分配有唯一明确的观察方向,并且因此能够同时进行高达m个单个测量。
33.为了增加光输出(lichtausbeute),在本实施例中,探测装置140的所有射束路径都通过传统的成像光学器件146收集并且然后才分布到各个探测布置1411至141
n
上,这些探测布置处于共同的成像光学器件146的焦平面147中。然而原则上也可能的是:还在没有共同的经典成像光学器件146的情况下将探测布置1411至141
n
并排布置。然而,由此缩小仪器,这在激光雷达系统中更确切地说是缺点。相反,借助图5所示的经典成像光学器件146,可以收集尽可能多的光并且在被指示(geordert)后才将该光分布到各个全息光学元件上。
34.为了实现总共j个观察方向,需要相应数量的单独的光路或光束。这些例如可以通过相应数量(j)的光发射器来实现。由于在图5中所示的实施变型方案中的各个探测布置
1411至141
n
彼此独立地执行测量,因此针对所有探测布置1411至141
n
分别使用相同的光辐射或波长是有意义的。由于在这种情况下,同时以相同的光辐射或波长激发或照射总共n观察方向或空间区域,因此能够使用仅n个光发射器,其所发射的光束通过无源光学器件分开。为此,图6示出激光雷达系统100的相应构造的照射装置130。照射装置130包括具有总共i个单个的光发射器1321至132
i
的光发射器布置131,分别以光束3111至311
i
的形式发射具有不同波长λ1至λ
i
的光辐射3101至310
i
,其中,在本实施例中,仅示出三个单个的光发射器1321、1322、1323。光发射器1321至132
i
中的每个分别分配有呈衍射光学元件(doe)形式的无源光学器件1341至134
i
,其将相应光发射器1321至132
i
的光束1321至132
i
分成两个或多个单个的部分射束311
i,1
至311
i,2
,所述部分射束分别在不同的空间方向上发射。作为使用总共n个doe作为无源光学器件1341至134
i
的替代,原则上也可以为此使用一个或多个全息光学元件(在此未示出)。
35.图7示出根据图5的变型方案的激光雷达系统100的示意图,激光雷达系统具有由照射装置130和探测装置140组成的光发射器布置131,照射装置130包括总共六个光发射器1321至1326,探测装置140包括总共两个探测布置1411、1412。为了清楚起见,将激光雷达系统100的照射装置130和探测装置140示出在观察区域110的相对置的侧上。在典型的激光雷达系统100中,这些装置布置在共同的壳体中,使得发送和接收光束3111至3116、3121至3126的光路基本上并排延伸。在此仅简述的(angedeutete)观察区域210通常包括大量单独的空间区域,其中,为了清楚起见,仅示出六个空间区域2111至2116,这些空间区域当前由两个探测布置1411、1412的探测区域2121、2122进行检测。光发射器布置131的前三个光发射器1321至1323以其分别单独产生的发送光束3111至3113依次照射空间区域2111至2113中的前三个空间区域。并行地,光发射器布置131的其余三个光发射器1324至1326以其分别单独产生的发送光束3114至3116依次照射其余三个空间区域2114至2116。因此,在激光雷达系统100的常规运行期间,在任意测量时刻,来自探测区域2121、2122中的每个探测区域的空间区域2111至2116分别被个别地分配给相应空间区域2111至2116的光辐射3101至310
k
照射。在接收侧上,从当前照射的空间区域2111至2116以接收光束3121至3126的形式反射或散射回至接收装置140的光辐射由两个探测布置1411、1412接收。分别布置在探测器1421、1422前面的全息光学元件1431、1432在此实现:每个探测器1421、1422仅接收来自分别仅个别地分配给相应探测器1421、1422的空间区域2111至2116的、个别地分配给该探测器1421、1422的光辐射3101至310
k
。
36.由于针对探测区域2121、2122中的每个探测区域的测量彼此独立地进行,因此对于所有探测区域2111、2112可以使用相同波长λ1至λ
k
的光辐射3101至310
k
。如在图7中借助不同的虚线所表明的那样,因此仅以三个不同的光辐射3101、3102、3103照射两个探测区域2111、2112的总共六个空间区域2111至2116。如在图8中所示的那样,因此可以将照射装置130的光发射器1321至132
i
的数量减少为总共三个。为此,激光雷达系统100具有在图6中所示的照射装置130,在该照射装置中,在每个光发射器1321、1322、1323之后分别连接无源光学器件1341、1342、1343作为分束器。例如呈衍射光学元件(doe)形式的无源光学器件1341、1342、1343中的每个在此将由相应光发射器1321、1322、1323产生的光束3111、3112、3113分别分成两个部分射束311
1,1
、311
1,2
、311
2,1
、311
2,2
、311
3,1
、311
3,2
,其分别扫描不同探测区域2111、2112中的空间区域2111至2116。
37.在上述实施例中所使用的全息图1441、1442、1443中,优选地涉及透射几何中的体积全息图。这种实施方案是有利的,因为借此能够实现更高的效率。然而,也可以借助其他类型的全息图、例如借助反射全息图来实现相应的全息光学器件。
38.在前面的描述中,术语“反射回来的光辐射”理解为:通过反射、漫反射或散射,从激光雷达系统的周围环境中的对象在探测装置的方向上反射回来的光辐射。
39.尽管已经通过优选的实施例更详细地示出和描述本发明,但是本发明不限于所公开的示例。相反,由本领域技术人员还可以在不脱离本发明的保护范围的情况下推导出其他变型方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。